Angel Xuan Chang | Angel Xuan Chang (original) (raw)
I am an Associate Professor at Simon Fraser University. Prior to this, I was a visiting research scientist at Facebook AI Research and a research scientist at Eloquent Labs working on dialogue. I received my Ph.D. in Computer Science from Stanford, where I was part of the Natural Language Processing Group and advised by Chris Manning. My research focuses on connecting language to 3D representations of shapes and scenes and grounding of language for embodied agents in indoor environments. I have worked on methods for synthesizing 3D scenes and shapes from natural language, and various datasets for 3D scene understanding. In general, I am interested in the semantics of shapes and scenes, the representation and acquisition of common sense knowledge, and reasoning using probabilistic models. My group also works on using machine learning for biodiversity monitoring, specifically with DNA barcodes as part of the larger BIOSCAN project. Some of my other interests include drawing and dance.
News
- June 2025 - Talks and workshops at CVPR 2025.
- June 11th - Talk at Workshop on 3D Scene Understanding for Vision, Graphics, and Robotics
- June 11th - Talk at Workshop on 3D Vision Language Models (VLMs) for Robotic Manipulation
- June 12th - Talk at Workshop on Bridging Language, Vision and Action in 3D Environments
- June 12th - Talk at Workshop on Compositional 3D Vision
- June 12th - Co-organizing the Embodied-AI workshop
- May 27, 2025 - Invited talk at CRV 2025.
- May 2025 - Congratulations to Austin and ZeMing on the acceptance of their paper ViGiL3D: A Linguistically Diverse Dataset for 3D Visual Grounding to ACL 2025.
- March 2025 - Congratulations to Xingguang, Han-Hung, and Ziyu for receiving the best paper award at 3DV for their work on An Object is Worth 64x64 Pixels: Generating 3D Object via Image Diffusion!
- January 2025 - Three papers accepted at ICLR 2025. Congratulations to
- Han-Hung and Yiming for their work on Duoduo CLIP: Efficient 3D Understanding with Multi-View Images.
- ZeMing, Austin, and Xiaoliang for their work on CLIBD: Bridging Vision and Genomics for Biodiversity Monitoring at Scale.
- Jiayi and Denys for their work on SINGAPO: Single Image Controlled Generation of Articulated Parts in Objects.

angelx-{at}-sfu-[dot]-ca
Associate Professor
School of Computing Science
Simon Fraser University
3DLG | GrUVi | SFU NatLang
SFU AI/ML | VINCI
Canada CIFAR AI Chair (Amii)
TUM-IAS Hans Fischer Fellow (2018-2022)
Google Scholar
Recent Papers
Research Themes
- [Grounding language to 3D](#Grounding language to 3D)
- [Language based content creation](#Language based content creation)
- BIOSCAN
- [Embodied AI](#Embodied AI)
- [Simulation platforms](#Simulation platforms)
- [Articulated objects for interactive environments](#Articulated objects for interactive environments)
- [Datasets for 3D deep learning](#Datasets for 3D deep learning)
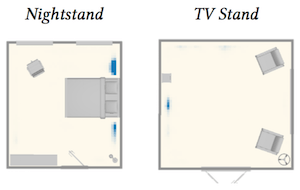
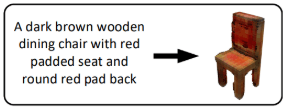
- [3D scene understanding and generation](#3D scene understanding and generation)
Grounding language to 3D









Language based content creation







BIOSCAN


BIOSCAN-5M: A Multimodal Dataset for Insect Biodiversity
Zahra Gharaee, Scott C Lowe, Zeming Gong, Pablo Millan Arias, Nicholas Pellegrino, Austin T. Wang, Joakim Bruslund Haurum, Iuliia Zarubiieva, Lila Kari, Dirk Steinke, Graham W Taylor, Paul Fieguth, Angel X. Chang
NeurIPS D&B 2024, arXiv:2406.12723 [cs.LG], June 2024
pdf | code | webpage

A Step Towards Worldwide Biodiversity Assessment: The BIOSCAN-1M Insect Dataset
Zahra Gharaee, Zeming Gong, Nicholas Pellegrino, Iuliia Zarubiieva, Joakim Bruslund Haurum, Scott C Lowe, Jaclyn TA McKeown, Chris CY Ho, Joschka McLeod, Yi-Yun C Wei, Jireh Agda, Sujeevan Ratnasingham, Dirk Steinke, Angel X. Chang, Graham W Taylor, Paul Fieguth
NeurIPS Datasets and Benchmarks 2023
pdf | code | webpage
Embodied AI



HomeRobot: Open Vocabulary Mobile Manipulation
Sriram Yenamandra, Arun Ramachandran, Karmesh Yadav, Austin Wang, Mukul Khanna, Theo Gervet, Tsung-Yen Yang, Vidhi Jain, Alexander William Clegg, John Turner, Zsolt Kira, Manolis Savva, Angel X. Chang, Devendra Singh Chaplot, Dhruv Batra, Roozbeh Mottaghi, Yonatan Bisk, Chris Paxton
CoRL 2023
pdf | code | challenge | webpage




Rearrangement: A Challenge for Embodied AI
Dhruv Batra, Angel X. Chang, Sonia Chernova, Andrew J. Davison, Jia Deng, Vladlen Koltun, Sergey Levine, Jitendra Malik, Igor Mordatch, Roozbeh Mottaghi, Manolis Savva, Hao Su
arXiv:2011.01975 [cs.AI], November 2020
pdf


On evaluation of embodied navigation agents
Peter Anderson, Angel X. Chang, Devendra Singh Chaplot, Alexey Dosovitskiy, Saurabh Gupta, Vladlen Koltun, Jana Kosecka, Jitendra Malik, Roozbeh Mottaghi, Manolis Savva, Amir R. Zamir
arXiv:1807.06757 [cs.AI], July 2018
pdf
Simulation platforms

Habitat 2.0: Training Home Assistants to Rearrange their Habitat
Andrew Szot, Alexander Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John Turner, Noah Maestre, Mustafa Mukadam, Devendra Singh Chaplot, Oleksandr Maksymets, Aaron Gokaslan, Vladimír Vondrus, Sameer Dharur, Franziska Meier, Wojciech Galuba, Angel X. Chang, Zsolt Kira, Vladlen Koltun, Jitendra Malik, Manolis Savva, Dhruv Batra
NeurIPS 2021
pdf | code | post

SAPIEN: a SimulAted Part-based Interactive ENvironment
Fanbo Xiang, Yuzhe Qin, Kaichun Mo, Yikuan Xia, Hao Zhu, Fangchen Liu, Minghua Liu, Hanxiao (Shawn) Jiang, Yifu Yuan, He Wang, Li Yi, Angel X. Chang, Leonidas Guibas, Hao Su
CVPR 2020
pdf | webpage

Articulated objects for interactive environments







Datasets for 3D deep learning

Habitat Synthetic Scenes Dataset (HSSD-200): An Analysis of 3D Scene Scale and Realism Tradeoffs for ObjectGoal Navigation
Mukul Khanna, Yongsen Mao, Hanxiao (Shawn) Jiang, Sanjay Haresh, Brennan Shacklett, Dhruv Batra, Alexander William Clegg, Eric Undersander, Angel X. Chang, Manolis Savva
CVPR 2024, arXiv:2306.11290 [cs.CV], June 2023
pdf | code | data | webpage

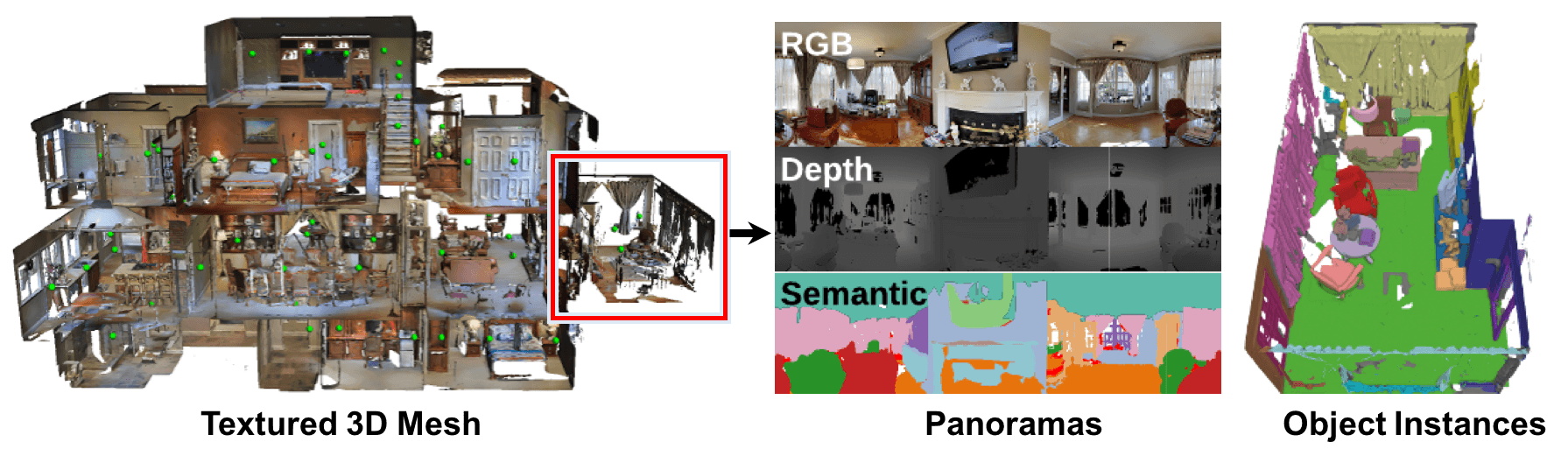
Habitat-Matterport 3D Semantics Dataset
Karmesh Yadav, Ram Ramrakhya, Santhosh K. Ramakrishnan, Theo Gervet, John Turner, Aaron Gokaslan, Noah Maestre, Angel X. Chang, Dhruv Batra, Manolis Savva, Alexander William Clegg, Devendra Singh Chaplot
CVPR 2023
pdf | webpage

Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI
Santhosh K. Ramakrishnan, Aaron Gokaslan, Erik Wijmans, Oleksandr Maksymets, Alexander Clegg, John Turner, Eric Undersander, Wojciech Galuba, Andrew Westbury, Angel X. Chang, Manolis Savva, Yili Zhao, Dhruv Batra
NeurIPS Datasets and Benchmarks Track 2021
pdf | webpage





ShapeNet: An Information-Rich 3D Model Repository
Angel X. Chang, Thomas Funkhouser, Leonidas Guibas, Pat Hanrahan, Qixing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, Fisher Yu
arXiv:1512.03012 [cs.GR], Dec 2015
pdf | bib | code | webpage
3D scene understanding and generation