Обработка георадарных данных в автоматическом режиме (original) (raw)
Обработка георадарных данных в автоматическом режиме
Обработка георадарных данных в автоматическом режиме
Авторы: Р. Р. Денисов, кандидат физ.-мат. наук В. В. Капустин
Рецензент: доктор физ.-мат. наук М. Л. Владов
Статья опубликована в
научно-техическом журнале
"Геофизика" №4 за 2010 год, стр. 76-80
ISSN 1681-4568
Аннотация: В предлагаемом материале рассматривается способ приближенного решения задачи инверсии для непрерывного радарного профилирования. Для получения разреза распределения электрофизических свойств грунтов используется поле обратного рассеяния электромагнитных волн. Способ получения устойчивого решения основан на построении нелинейных пространственных фильтров, применяемых к числовому множеству значений диэлектрической проницаемости среды (или скорости электромагнитных волн). Предлагаемый подход позволяет построить автоматизированную систему обработки георадарных данных, достаточно эффективно работающую в сложнопостроенных рассеивающих средах. Ключевые слова: георадар, автоматизированная обработка, алгоритм, диэлектрическая проницаемость грунта.
Abstract. Authors consider the way of approximate solution of the inversion task for continuous georadar profiling. The back-scattering electromagnetic field is used to obtain the section of electrical and physical subsoil properties. Method of stable solution is based on building non-linear spatial filters that are applied to number set of subsurface permittivity (or electromagnetic waves velocity). The suggested approach allows building on electronic system of georadar data processing that works efficiently in the complex diffusing medium. Key words: georadar, electronic data processing system, algorithm, subsurface permittivity.
Применение георадарного метода для решения инженерно-геологических и геотехнических задач в настоящее время приобретает все более широкие масштабы. Это объясняется простотой и удобством проведения полевых работ и высокой производительностью метода. Одновременно с этим возникает целый ряд проблем с обработкой больших массивов данных и интерпретацией полученного материала. При использовании георадара для исследования автомобильных дорог и железных дорог, аэродромов, при работе на акваториях протяженность георадарных профилей может составлять десятки и даже сотни километров. В большинстве случаев оперативное получение конечного материала является необходимым условием проведения георадарных работ [2].
Существующие в настоящее время программные средства обработки георадарных данных позволяют для ряда стандартных задач использовать готовые графы обработки, улучшающие вид материала, поступающего в интерпретацию [3]. При решении задач выделения в плане локальных областей электрофизических неоднородностей (участки обводнения, линзы глин, пустоты, трещины на асфальтовом или бетонном покрытии и т.п.) автоматизация данного процесса может быть частично решена методами атрибутного анализа. Данная задача аналогична задаче профилирования, применяемого в различных геофизических методах. В качестве атрибутов могут быть использованы амплитудные, частотные, фазовые характеристики записи, затухание и ряд других.
Задача определения пространственного положения электрофизических границ и неоднородностей (задача зондирования) является более сложной в смысле использования средств автоматизации. Это связано с тем, что автоматизированное определение (пикировка) электрофизических границ, в большинстве случаев, требует интерактивное участие интерпретатора или применения сложных самообучающихся алгоритмов. Вполне естественно, что для решения большинства типовых задач, связанных с изучением инженерно-геологических условий, хотелось бы иметь возможность оперативной автоматизированной обработки позволяющий получить удобный для интерпретации материал, хотя бы и с некоторой потерей точности.
Задача построение разреза подповерхностной среды, как правило, решается методом визуального анализа волновой картины радарограммы и прослеживания выбранных по тем или иным критериям осей синфазности отражённых сигналов, которые соответствуют границам раздела слоёв с различными электрофизическими параметрами [5]. Этот способ не вызывает трудностей, если толща состоит из диэлектрически контрастных областей, на границах которых диэлектрическая проницаемость меняется скачкообразно, и эти границы уверенно отыскиваются на радарограмме.
Однако нередко случается так, что характеристики компонент, например, грунта, меняются плавно, без скачка, вследствие диффузного характера контакта соседних слоёв или в силу каких-то других причин. В этом случае оси синфазности, которые соответствовали бы искомым границам, на радарограмме трудно выделяемы, или отсутствуют вовсе. В подобных условиях единственное решение – вручную, известными в геофизике приёмами, определить скоростные характеристики участков разреза по найденным на радарограмме дифрагированным волнам, которые сформировались в результате отражений от точечных подповерхностных объектов, и объединять области с близкими значениями скорости в слои. Достоверность построенного подобным образом разреза определяется количеством обнаруженных отражений, равномерностью распределения их по площади радарограммы, степенью подготовки геофизика-интерпретатора и человеческим фактором (невнимательность, усталость и т.п.).
Трудоёмкость этого метода не позволяет производить обработку больших объёмов георадиолокационных данных за приемлемое время. Таким образом, сводится на нет преимущество метода георадиолокации в области высокой производительности. Учитывая существующие особенности метода подповерхностной радиолокации: сравнительно небольшую глубинность исследований, высокую разрешающую способность метода, сложность и неоднородность верхней части разреза, вполне естественно выглядит возможность использования поля обратного рассеяния электромагнитных волн для определения электрофизического строения среды [4].
Автоматизация процесса распознавания дифрагированных отражений и определения кинематических характеристик волн с последующим построением разреза позволяет расширить возможности георадиолокации.Рассмотрим основные принципы, которые должны быть заложены в алгоритм анализа поля обратного рассеяния волн георадара. Волновое поле на радарограмме имеет достаточно сложный характер и обычно состоит из следующих компонент: однократные отражения; кратные отражения; обратное рассеяние (дифракция); воздушные отражения; помехи.
В связи с этим первой проблемой является выделение поля обратного рассеяния из совокупности наблюденных данных. Эта задача может быть частично решена с использованием стандартных средств обработки - частотной и пространственной фильтрации [5]. Однако полного разделения полей добиться не удается. Поэтому после предварительной обработки данных полученный числовой массив условно рассматривается как поле обратного рассеяния, которое может быть подвергнуто преобразованию (типа гиперболической миграции) для вычисления диэлектрической проницаемости ε или скорости v. В процессе вычисления алгоритм исключает значения непопадающие в заранее заданный диапазон ε1 < ε < ε2 и вычисляет в окрестности каждой точки определения ε значения динамических параметров - частоты f, затухания d, амплитуды A и т.п. В результате может быть определено векторное полe [ε,f,d,A,……Mn] размерности n, равной количеству динамических параметров. Далее, используя априорные или полученные в результате статистического оценивания связи между диэлектрической проницаемость и одним или несколькими динамическими параметрами, может быть построена маска нелинейного пространственного фильтра, позволяющего подавлять значения ε, определяемые кратными отражениями, воздушными отражениями и помехами.
Автоматизированная обработка производится по следующему алгоритму:
- Выделение на радарограмме точек, через которые с высокой вероятностью могут проходить фрагменты дифракционных годографов;
- Определение кинематических и динамических характеристик сигналов в окрестностях выделенных точек (скорость волны по наклону фрагментов линии годографа, центральную частоту и т.п.);
- Отбраковка точек по скоростному критерию.
- В дальнейшем оставшиеся точки будут служить в качестве опорных при построении разреза;
- Пересчёт скоростей волн в эффективные значения действительной части комплексной
- относительной диэлектрической проницаемости ε;
- Корректировка значений ε по частотному атрибуту или группе атрибутов;
- Построение разреза диэлектрической проницаемости среды во временной области методом интерполяции значений ε по опорным точкам;
- Пересчёт временной шкалы разреза в шкалу глубинную в соответствии со значениями ε;
- Сохранение разреза диэлектрической проницаемости в графический файл в виде изолиний с заданным шагом значений и цветовой схемой.
В результате работы первых двух шагов алгоритма формируется набор точек, которые имеют координаты, и атрибуты в виде значений скорости и частоты (рассматривается вариант использования одного атрибута). Далее происходит отбраковка точек по скоростному критерию – например, точки со значениями скорости выше 30 см/нс (скорость электромагнитной волны в вакууме) и ниже 3.33 см/нс (минимальная скорость электромагнитной волны в воде) не принимаются к рассмотрению в качестве опорных точек разреза и удаляются.На Рис. 1 представлена радарограмма, на которой красными маркерами показаны положения опорных точек после отбраковки. Высокая плотность точек позволяет получить достаточно детализированный разрез.
Рис.1 Пример радарограммы с положением опорных точек, после отбраковки по скоростному критерию.
После сортировки точек производится пересчёт значений скорости в значения диэлектрической проницаемости, так как в дальнейшем будут исследоваться не кинематические характеристики волн, а электрофизические свойства среды. Наиболее ответственный этап обработки – корректировка значений ε по частотному (или другому) атрибуту. Он требуется для исправления возможных ошибок определения скорости электромагнитных волн и исключения искажений, вызванных влиянием кратных отражений, «воздушных» отражений и других помех.
Данная процедура производится, как отмечалось выше, с помощью адаптивной пространственной фильтрации. Маска фильтра (решающее правило) может быть построена на основе одного или нескольких эмпирически установленных связей между точкой матрицы диэлектрической проницаемости среды {ε} и одним или несколькими динамическими атрибутами. Рассмотрим вариант построения подобного фильтра на основании одного из свойств изучаемой среды.
Как известно, затухание зондирующих импульсов георадара является частотно зависимым - высокочастотные компоненты электромагнитных волн затухают быстрее, чем низкочастотные. Наряду с этим влажность, от которой первую очередь зависит диэлектрическая проницаемость грунта, также меняется с глубиной, как правило,- увеличивается, а соответственно увеличивается и значение ε. Если для определенных в процессе обработки значений центральных частот импульсов рассчитать средние значения εср из множества {ε} и построить эту зависимость на графике в виде облака точек, то уравнение регрессии может быть использовано в качестве корректирующей функцией (маски фильтра). В результате применения этой функции достоверность интерпретации разреза значительно повышается. На Рис.2 показан вид корректирующей функции для радарограммы, полученной на поверхности мерзлых грунтов.
Рис. 2 Корректирующая функция, полученная на участке развития слоя сезонного промерзания.
Следует заметить, что геофизик-интерпретатор, опираясь на априорную информацию о строении разреза, может ввести собственную корректирующую функцию, более точно отражающую взаимосвязь ε и частоты для данного типа разреза. Заключительный этап построения разреза диэлектрической проницаемости – интерполяция значений ε по опорным точкам известными в вычислительной математике методами (триангуляция Делоне). Таким образом, на вход программы автоматизированной обработки подаётся числовая матрица амплитуд отражённых сигналов, полученная при георадиолокационном профилировании, на выходе формируется матрица того же размера, но уже со значениями ε для каждой точки двумерного пространства разреза.
Наиболее информативно визуализировать матрицу значений ε в виде контурного графика с залитыми, в соответствии с выбранной цветовой схемой, областями. На Рис. 3 представлен результат автоматизированной обработки профиля, полученного георадаром с центральной частотой зондирующих импульсов 300 МГц (исследования характеристик грунта в районе многолетней мерзлоты).
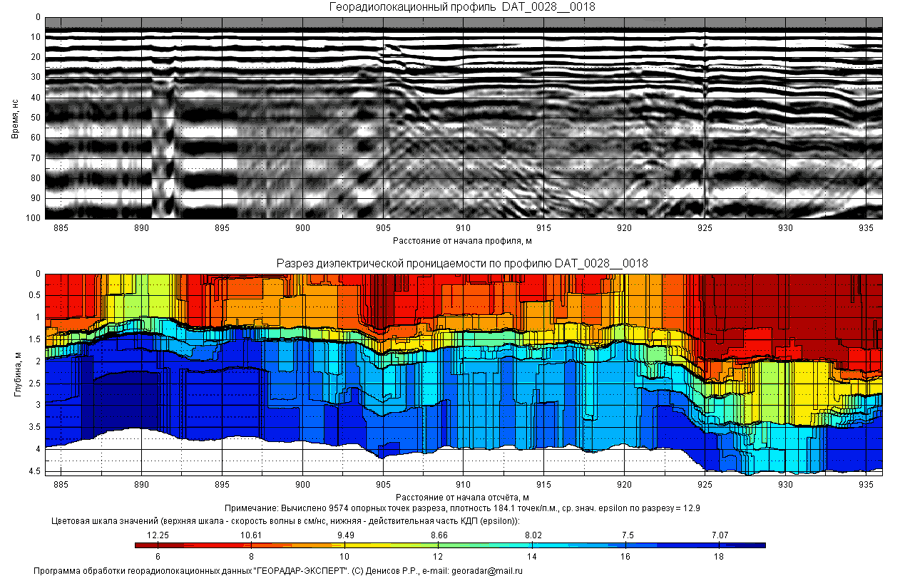
Рис. 3 Георадиолокационный профиль, полученный при зондировании промёрзшего грунта и результат автоматизированной обработки в виде разреза диэлектрической проницаемости. В отличие от необработанной радарограммы, на разрезе можно наблюдать степень промерзания различных участков подповерхностной среды.
Автоматизированное построение разреза диэлектрической проницаемости имеет следующие преимущества перед традиционными методами обработки георадиолокационных данных:
- Увеличивается глубинность георадиолокационных исследований – алгоритм распознавания фрагментов дифракционных годографов имеет высокую помехоустойчивость и удовлетворительно работает и в шумовой области радарограммы [Рис. 4];
- Повышается информативность исследований – фиксируются границы разреза там, где нет достаточного скачка диэлектрической проницаемости для формирования характерных, для границ раздела сред, осей синфазности сигналов. Также наглядно прослеживается изменение диэлектрической проницаемости внутри слоя [Рис. 5];
- Значительно возрастает скорость обработки полевого материала, что немаловажно при постоянно увеличивающихся объёмах георадарных работ, особенно в дорожной и железнодорожной отраслях;
- Расширяется область применения георадара. На основе разрезов диэлектрической проницаемости можно строить распределения влажности по разрезу [Рис. 6] или частотные распределения;
- Сведено к минимуму влияние так называемого «человеческого фактора».
В заключении необходимо отметить, что предлагаемый метод не является панацеей при решении всех проблем георадиолокации, а представляет собой один из вариантов приближенного решения задачи инверсии, имеющий пределы применимости.
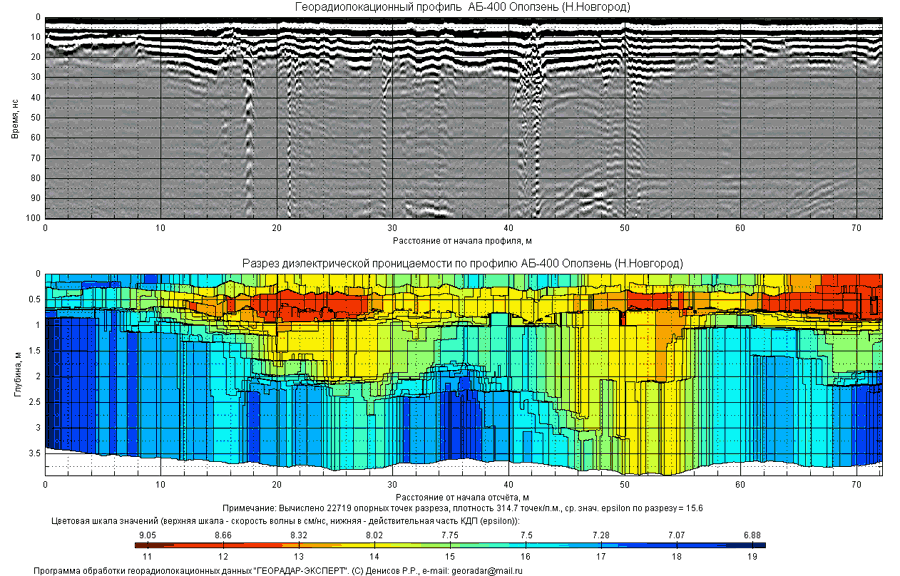
Рис. 4 Георадиолокационный профиль, пересекающий оползневой участок и результат автоматизированной обработки в виде разреза диэлектрической проницаемости. В результате обработки определяется тело оползня и возможная граница скольжения.
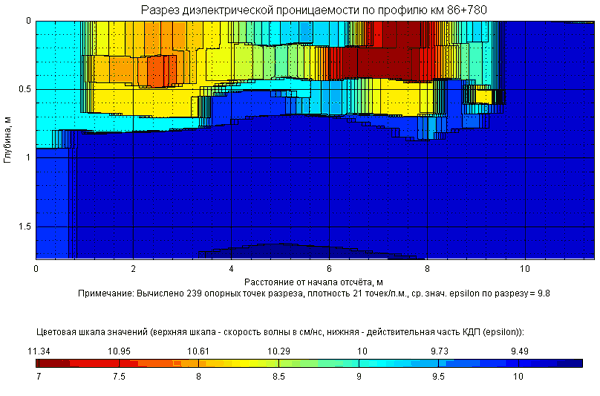
Рис. 5 Результат автоматизированной обработки георадиолокационного профиля, пересекающего автомобильную дорогу с асфальтобетонным покрытием. Опираясь на анализ изменений значений диэлектрической проницаемости внутри конструктивных слоёв, появляется возможность на более высоком уровне производить диагностику состояния дорожных одежд и подстилающих грунтов.
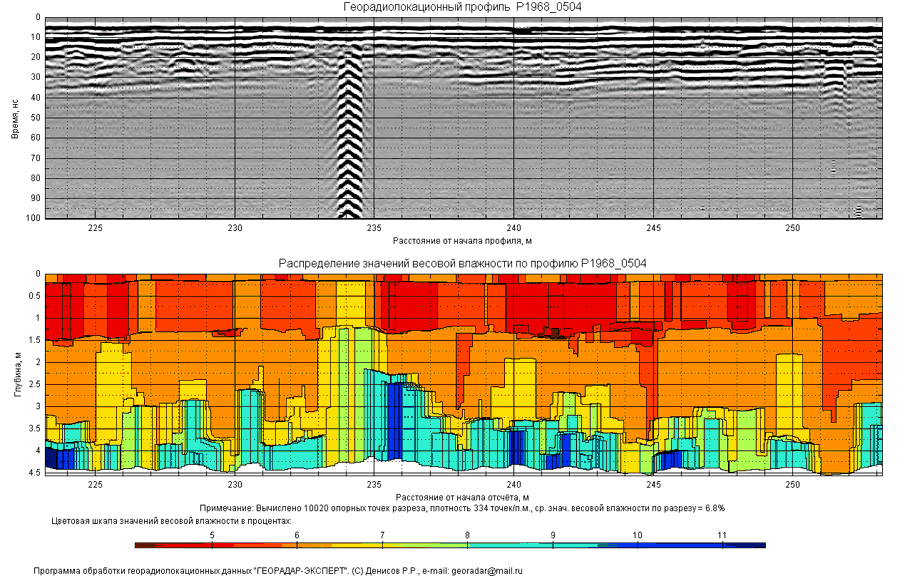
Рис. 6 Георадиолокационный профиль вдоль песчаной насыпи автомобильной дороги. В результате автоматизированной обработки построен разрез, по которому можно судить о распределении влажности в районе водопропускной трубы, находящейся на горизонтальной отметке 234 метра.
Литература
Гонсалес Р., Вудс Р., Эддинс С., 2006, Цифровая обработка изображений в среде MATLAB: Техносфера.
Капустин В.В., Строчков Ю.А., 2008, Некоторые особенности обработки георадарных данных при исследовании строительных конструкций: Разведка и охрана недр, 1, 22-25.
Капустин В.В., 2005, Дополнительные возможности компьютерной обработки георадарных и сейсмических данных: Разведка и охрана недр, 12, 26-31.
В.Б. Левянт, И.Б. Петров, С.А. Панкратов.,2009, Исследование характеристик продольных и обменных волн отклика обратного рассеяния от зон трещиноватого коллектора: Технологии сейсморазведки, 2, 3-11.
Старовойтов А.В., 2008, Интерпретация георадиолокационных данных: М., Изд-во Московского государственного университета.