1.5. Содержание отчета (original) (raw)
1. Цель работы;
2. Схему установки;
3. Результаты измерений, сведенные в таблицу;
4. Графики, построенные по результатам измерений;
5. Вывод.
1.6.Контрольные вопросы
1. Принцип действия потенциометрического датчика давления.
2. Принцип действия индуктивного датчика давления.
3. Погрешности исследуемых датчиков давления и методы их уменьшения.
4. Конструкция датчиков давления.
5. Перечислите погрешности манометров с потенциометрическими датчиками.
6. Перечислите погрешности манометров с индуктивными датчиками.
7. Методы устранения погрешностей манометров различного типа.
Литература
1. Боднер В.А. “Приборы первичной информации”. М. Машиностроение, 1981 г.
2. Дорофеев С.С. Авиационные приборы. М.: Воениздат, 1992 г.
3. Панфилов Д.И. Иванов В.С. Датчики фирмы “ Motorola”. М.: Додэка, 2000 г.
4. Уолт Кестер. Учебник фирмы Analog Devices. / Перевод с английского - Горшков Б.Л., Санкт-Петербург: Автекс, 1998 г., электронная версия.
ЛАБОРАТОРНАЯ РАБОТА № 2
ИССЛЕДОВАНИЕ ПРИБОРОВ ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ
2.1. Цель работы
Целью лабораторной работы являются изучение принципов работы электрических тахометров, ознакомление с конструкцией, экспериментальное определение характеристик.
2.2. Краткая теоретическая часть
2.2.1. Назначение и типы тахометров
Прибор, предназначенный для измерения частоты вращения, называется тахометром. В авиации тахометры применяются для измерения частоты вращения силовых агрегатов, а также вала двигателя. Частота вращения вала силовой установки летательного аппарата является важнейшим параметром, по которому судят о тяге или мощности двигателя, о динамической и тепловой напряженностях.
Наибольшее распространение получили следующие методы измерения частоты вращения по принципу действия чувствительного элемента (ЧЭ):
– центробежные, в которых ЧЭ реагирует на центробежную силу, развиваемую неуравновешенными массами при вращении вала;
– магнитоиндукционные, основанные на зависимости наводимых в металлическом теле вихревых токов от частоты вращения;
– электрические постоянного, переменного или импульсного тока, основанные на зависимости генерируемого напряжения от частоты вращения;
– фотоэлектрические, основанные на модуляции светового потока вращающимися элементами и др.
Магнитоиндукционные, тахометры нашли наиболее широкое применение в современной авиации.
2.2.2. Принцип работы магнитоиндукционного тахометра
Принцип действия магнитоиндукционных тахометров основан на явлении наведения вихревых токов в металлическом теле вращающемся в магнитном поле (или в неподвижном теле, находящемся во вращающемся магнитном поле).
Магнитоиндукционные тахометры бывают двух типов: с цилиндрическим ЧЭ (рис. 2.1 а) и с дисковым ЧЭ (рис. 2.1 б).

Рис. 2.1
а – тахометр с полым цилиндром; б – тахометр с диском;_1_– магнит;_2_– чувствительный элемент;_3_– термомагнитный шунт;_4_– магнитопровод.
Индукционные тахогенераторы редко применяются как измерительные приборы вследствие больших погрешностей, но они незаменимы в качестве датчиков угловой скорости в системах автоматики.
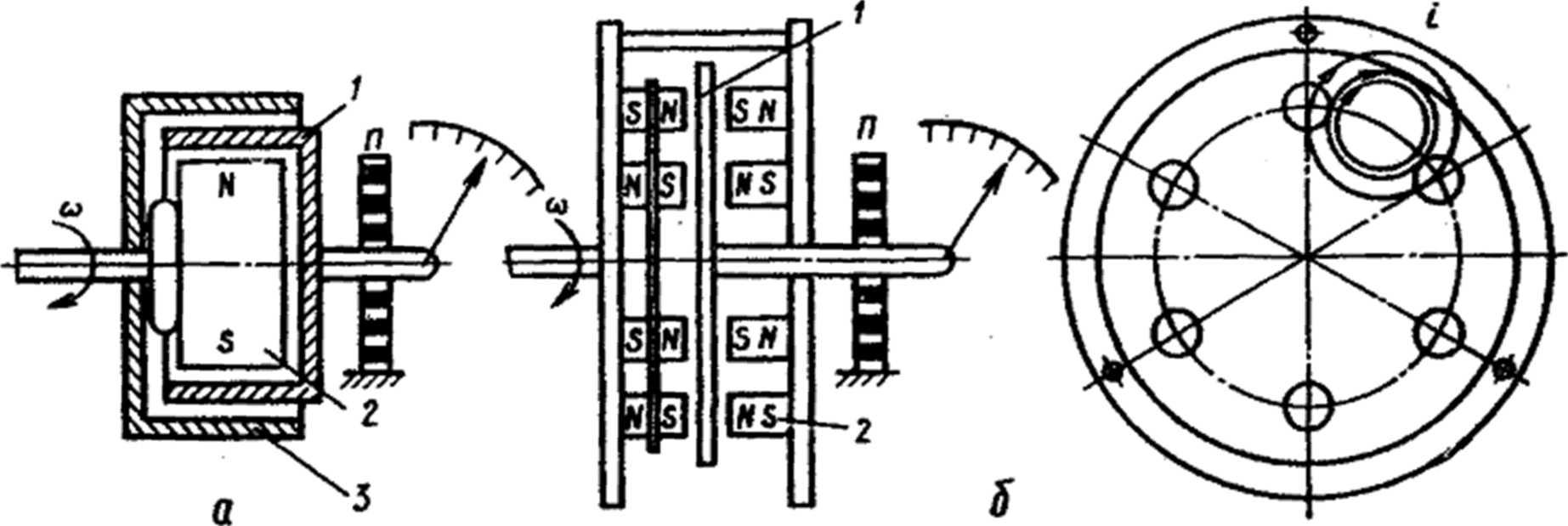
Рис. 2.2 Кинематические схемы магнитоиндукционных тахометров:
а – с полым цилиндром; б – с диском; _1_– чувствительный элемент;_2_–магнит;_3_– магнитопровод.
К ним относятся магнитоиндукционные тахометры, которые бывают двух типов: с чувствительным элементом в виде тонкостенного электропроводящего полого цилиндра 1(рис. 2.2 а), помещенного в зазоре между вращаемым магнитом _2_и магнитопроводом _3,или с чувствительным элементом в виде диска_1(рис. 2.2 _б),_помещенного в зазоре между вращаемыми цилиндрическими магнитами _2._Обычно постоянные магниты вращаются с частотой, пропорциональной измеряемой частоте вращения вала двигателя, а чувствительные элементы (цилиндры и диски) закреплены на самостоятельных осях и могут поворачиваться лишь на некоторый угол, ограниченный спиральной противодействующей пружиной П.
При вращении магнитной системы в теле чувствительного элемента (ЧЭ) за счет магнитной индукции наводится ЭДС, прямо пропорциональная скорости вращения магнита:
 (2.1)
(2.1)
где_k_ _1_– коэффициент, зависящий от индукции магнитного потока, пронизывающего ЧЭ;
п _m_– угловая скорость вращения магнита.
ЭДС, индуцированная в ЧЭ, вызывает появление в нем индукционных токов i, величина которых зависит от ЭДС, вызвавшей их, числа пар полюсов магнита, размеров и материалов ЧЭ. Индукционные токи, в свою очередь, создают магнитное поле. В результате взаимодействия магнитных полей ЧЭ и постоянных магнитов возникает вращающий момент, стремящийся повернуть ЧЭ вслед за вращающимся магнитом. Вращающий момент, действующий на элемент, пропорционален величине индуцированного в нем вихревого тока, а следовательно, и скорости вращения магнита:
 (2.2)
(2.2)
где_k_ _2_– постоянный коэффициент пропорциональности.
Под действием вращающего момента ЧЭ поворачивается и закручивает пружину_П_, создающую противодействующий момент, пропорциональный углу закручивания пружины:
 (2.3)
(2.3)
где_с_– жесткость пружины;
– угол закручивания пружины.
На одной оси с ЧЭ укреплена стрелка, угол отклонения которой пропорционален угловой скорости вращения постоянного магнита.
Угол поворота стрелки прибора определяется равенством моментов откуда
 (2.4)
(2.4)
где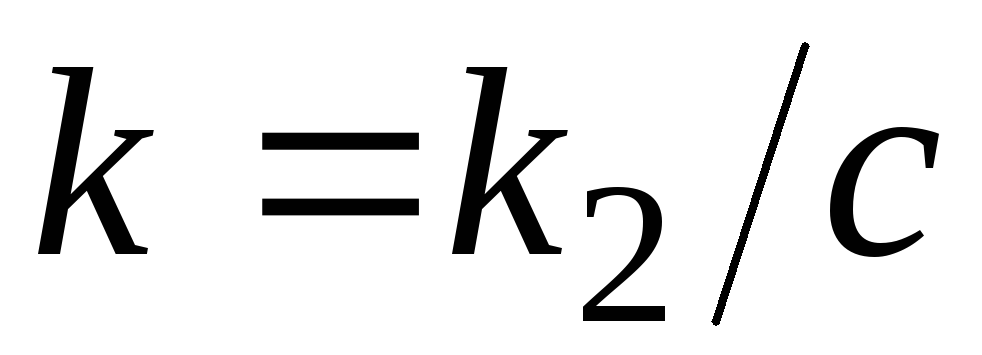 – коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.
– коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.
2.2.3. Состав и конструкция магнитоиндукционного тахометра
На самолетах и вертолетах находят применение магнитоиндукционные тахометры типа ТЭ (ТЭ-15, 2ТЭ-15-1, ТЭ-5-2М и др.) со шкалой, отградуированной в оборотах в минуту, и типа ИТЭ (ИТЭ-1, ИТЭ-2 и др.) со шкалой, отградуированной в процентах. Разница в устройстве их незначительна.
В комплекты тахометров этого типа могут входить один – два датчика и один показывающий прибор, либо один датчик и один – два указателя. В частности, комплект тахометра может состоять из одного датчика ДТЭ-1 и одного показывающего прибора ИТЭ-1. Соответственно датчик ДТЭ-2, Д-3М или Д-3-2 должен работать в системе измерения оборотов совместно с двумя измерителями типа ИТЭ-1 (ИТЭ-1Т) или с показывающим прибором ИТЭ-2 (ИТЭ-2Т), объединяющим в одном корпусе две измерительные системы.
Конструкция датчика Д-3-2 представлена на рис. 2.3.

Рис. 2.3 Датчик магнитоиндукционного тахометра Д-3-2:
_1_– хвостовик;2,_6_–крышки;_3, 7_– шарикоподшипники;_4_– ротор;_5_– статор;_8_– болт.
Датчик представляет собой трехфазный генератор переменного тока с четырехполюсным постоянным магнитом – ротором 4.
Ротор напрессован на валу, заканчивающемся квадратным хвостовиком _1,_которым вал генератора соединяется с приводом вала авиадвигателя. Эта передача обладает достаточной гибкостью и компенсирует скручивающие колебания и перекосы, которые могут возникнуть при монтаже датчика.
Ротор вращается в шарикоподшипниках 3_и_7, которые установлены в крышках 2_и_6.
Статор_5_датчика набран из пластин электротехнической стали. В целях уменьшения потерь в статоре от вихревых токов пластины изолированы одна от другой клеем.
Обмотка статора – четырехполюсная, трехфазная, выполненная из медного провода. Фазовые обмотки соединены звездой.
Магнитоиндукционный тахометр является дистанционным прибором. Синхронная дистанционная передача состоит из трехфазного генератора переменного тока (датчика), расположенного на авиадвигателе, трехпроводной линии и синхронного двигателя, размещенного в указателе.
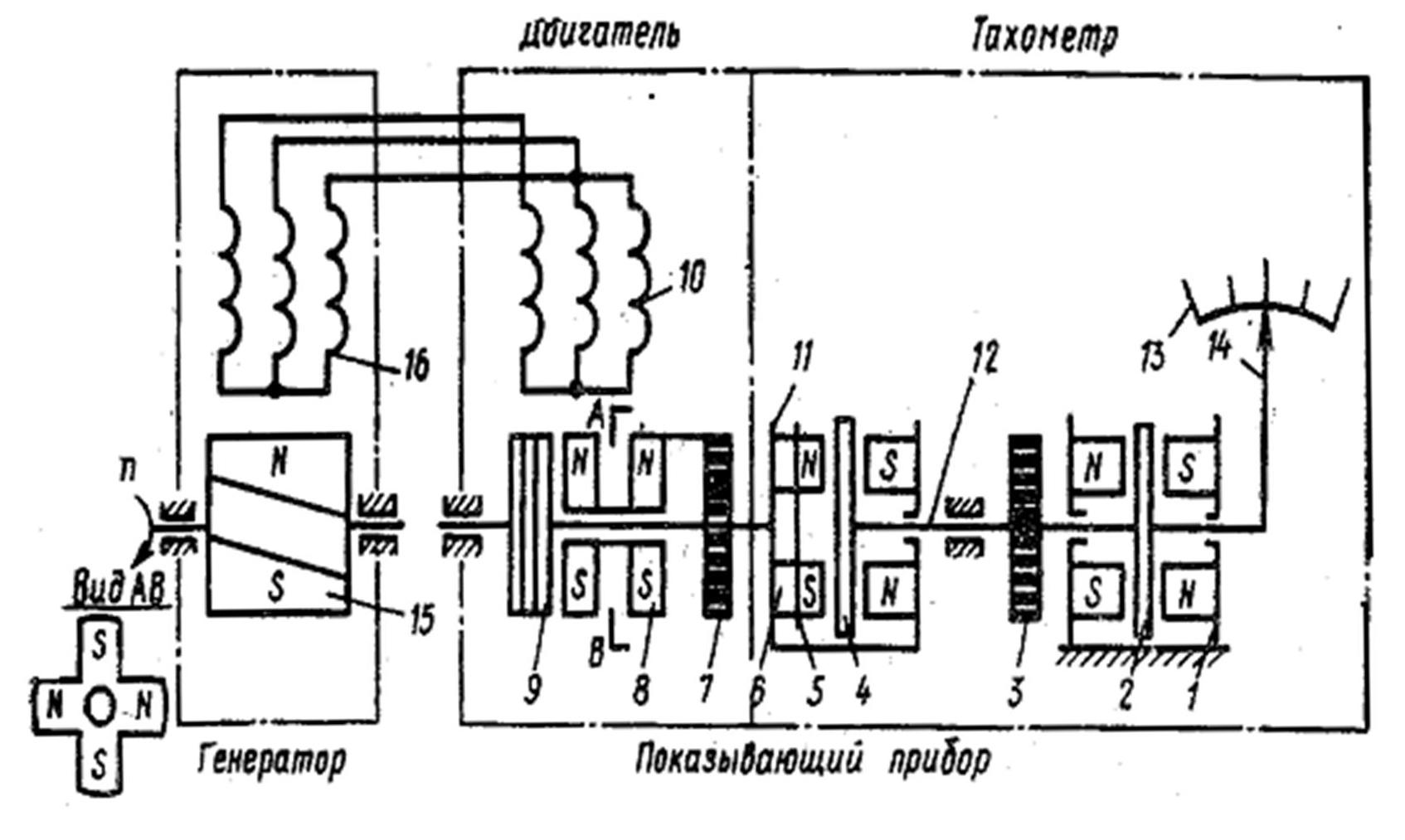
Рис. 2.4 Электрокинематическая схема тахометра:
_1_– плата с магнитами;_2_– диск демпфера;_3_– пружина;_4_– диск;_5_термомагнитный шунт;_6_– постоянные магниты;_7_– пружина;_8_– крестообразный магнит;_9_– гистерезисные диски;_10_– обмотка двигателя;_11_– дисковая плата;12 – ось;_13_– шала;_14_– стрелка;_15_– якорь;16 – обмотка статора.
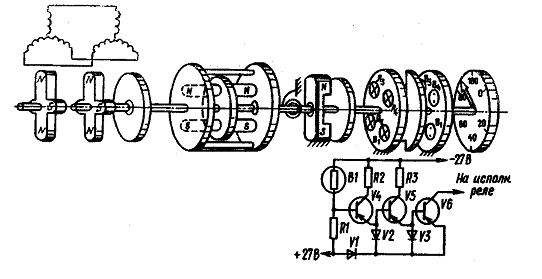
Рис. 2.5 Кинематическая схема показывающего прибора тахосигнальной аппаратуры.
Рис. 2.6 Показывающий прибор тахометра ИТЭ – 1:
_1_– плата с магнитами;_2_– диск демпфера;_3_– пружина;_4_– диск;_5_– термомагнитный шунт;_6_– постоянные магниты;_7_– пружина;_8_– крестообразный магнит;_9_– гистерезисные диски;10 – обмотка двигателя;_11_– дисковая плата;_12_– ось;_13_– шкала;_14_–стрелка.
Совместное рассмотрение рисунков 2.4 – 2.6 позволяет изучить конструкцию показывающего прибора и работу комплекта магнитоиндукционного тахометра типа ИТЭ.
Показывающий прибор включает в себя два узла, смонтированные в одном корпусе, синхронный двигатель и измерительную систему (тахометр).
Синхронный двигатель состоит из статора с трехфазной обмоткой _10_и ротора, собранного из двух крестообразных магнитов _5_и трех гистерезисных дисков _9._Постоянные крестообразные магниты насажены на вал свободно и могут поворачиваться относительно вала на некоторый угол, так как соединяются с ним пружиной 7, через которую передают крутящий момент на вал синхронного двигателя.
Это обеспечивает вхождение двигателя в синхронизм до того, как он разовьет полную мощность.
Гистерезисные диски _9_изготовляются из магнитотвердого материала. В синхронном режиме работы диски взаимодействуют с вращающимся полем так же,как и постоянные магниты, но с меньшей силой взаимодействия.
Измерительная часть прибора состоит из магнитного узла с двумя дисковыми платами _11_с впрессованными в них шестью парами постоянных магнитов _6._На магниты надет термомагнитный шунт 5, предназначенный для компенсации температурной погрешности. Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается.
В воздушном зазоре между торцами противоположных полюсов магнитов расположен чувствительный элемент – диск _4,_изготовленный из медно-марганцевого сплава с малым температурным коэффициентом.
Таким образом, магнитный узел укреплен на конце вала синхронного двигателя и вращается с синхронной скоростью, а чувствительный элемент – диск связан, через ось _12_со стрелкой _14,_перемещающейся по шкале 13.
Для уменьшения колебаний стрелки около установившегося положения в конструкции прибора предусмотрен демпфер, по устройству аналогичный измерительному узлу 11.
Платы_1_магнитного демпфера закреплены неподвижно. Между торцами шести пар неподвижных магнитов находится алюминиевый диск _2_демпфера, связанный с осью измерительного узла.
Взаимодействие наводимых в алюминиевом диске вихревых токов с магнитным потоком магнитов приводит к превращению энергии колебаний в тепловую и к повышению устойчивости стрелки прибора.
Тахометр ИТЭ-1 работает следующим образом. Напряжение статорной обмотки _16_генератора датчика с частотой, пропорциональной частоте вращения ротора авиадвигателя, возбуждает в статорной обмотке _10_синхронного двигателя показывающего прибора вращающееся магнитное поле, которое приводит к намагничиванию гистерезисных дисков двигателя. Гистерезисные диски выполнены из ферромагнитного материала с большой коэрцитивной силой, поэтому создаваемое ими магнитное поле из-за большого гистерезиса отстает на некоторый угол от намагничивающего поля статора.
В результате возникает вращающий момент дисков ротора двигателя, направление которого совпадает с направлением вращающегося поля статорных обмоток.
При частоте вращения ротора, близкой к синхронной, когда обороты ротора и поля статора становятся одинаковыми, постоянные магниты _8_успевают взаимодействовать с полем статора, входят в синхронизм и, постепенно закручивая пружину 7, начинают воспринимать полную нагрузку.
В синхронном режиме работы двигателя основной вращающий момент создается в результате взаимодействия поля постоянных магнитов с вращающимся полем статора, а гистерезисные диски создают лишь незначительный дополнительный момент.
При резких увеличениях частоты вращения авиадвигателя, следовательно, и скорости вращения магнитного поля статора возможен переход двигателя в асинхронный режим работы. В этом случае полюсы постоянных магнитов вращаются с некоторым отставанием от полюсов поля статора. Гистерезисные диски помогают ротору следовать за магнитным полем статора и вводят постоянные магниты ротора в синхронную работу.
Ротор двигателя вращает магнитную систему_11_измерительного узла. В результате взаимодействия полей магнитов _6_и диска _4_чувствительный элемент (диск) с закрепленной на его оси стрелкой _14_поворачивается и закручивает противодействующую пружину 5. Таким образом, угол поворота диска пропорционален значению измеряемой частоты вращения. Демпфер, укрепленный на оси чувствительного элемента, успокаивает подвижную систему и облегчает снятие показаний стрелки указателя.
Указатели ИТЭ-2 предназначены для измерения частоты вращения валов двух двигателей или двух ступеней компрессора одного двигателя. В корпусе указателя ИТЭ-2 размещены два измерительных узла, аналогичные рассмотренным, движение которых передается на две соосные стрелки. Магнитоиндукционный демпфер в них отсутствует. Демпфирование колебаний осуществляется за счет моментов трения зубчатых передач.
К магнитоиндукционным тахометрам относится и тахометрическая сигнальная аппаратура (ТСА), которая может обеспечивать либо только выдачу дискретных сигналов соответствующих определенным частотам вращения вала (ТСА-12), либо выдачу дискретных сигналов и индикацию частоты вращения вала (ТСА-6). Конструкция показывающих приборов ТСА аналогична конструкции ИТЭ-1 (рис. 10). Отличие заключается лишь в наличии сигнального устройства, которое состоит из осветителей_Л1_,_Л4_и фоторезисторов B 1,B 4, разделенных между собой профилированным диском. Диск укреплен на оси измерительного узла. При изменении скорости вращения профильный диск поворачивается, в результате меняется степень освещенности тех или иных фоторезисторов, включенных в схему управления, и тахометр выдает сигналы, соответствующие определенным частотам вращения, на исполнительные устройства.
Шкала показывающего прибора ИТЭ отградуирована в процентах, измерительный предел – (0…110) %, цена деления – 1 %, погрешность измерения не превышает ±0,5 % в рабочем диапазоне шкалы от 60 до 100% и 1% - в остальном диапазоне.
Основная погрешность выдачи дискретных сигналов ТСА не превышает ±2 %.
Датчики магнитоиндукционных тахометров не имеют методической погрешности.
Основная инструментальная погрешность указателя тахометра определяется трением в подшипниках и ошибками градуировки шкалы.
Дополнительные погрешности обусловлены прежде всего влиянием температуры и вызываются изменением электрического сопротивления чувствительного элемента, магнитной проводимости магнитопроводов и упругих свойств противодействующей пружины. Конструктивная погрешность из-за изменения температуры окружающей среды частично компенсируется подбором материалов деталей. В частности, чувствительный элемент - диск изготовляется из марганцовистой меди (96,1 % Сu, 3,9 % Мn) с положительным температурным коэффициентом. Противодействующая пружина из фосфористой бронзы и магниты из соответствующих сплавов имеют отрицательные температурные коэффициенты. Для компенсации остаточной температурной погрешности применяется температурный шунт 5, надетый на магниты _6._Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается. Действие шунта заключается в следующем. С увеличением температуры окружающей среды увеличивается сопротивление токопроводящего диска_4_и уменьшается сила наведенного тока. Одновременно с этим уменьшается магнитная проницаемость шунта, который меньшую часть магнитного потока пропускает через себя, вследствие чего увеличивается магнитная индукция в зазоре измерительного магнитного узла. При этом сила взаимодействия постоянных магнитов _6_и токов в диске _4,_аследовательно, и движущий момент практически остаются неизменными.
Соседние файлы в папке Лекции