Reinforcement Learning - MATLAB & Simulink (original) (raw)
Train deep neural network agents by interacting with an unknown dynamic environment
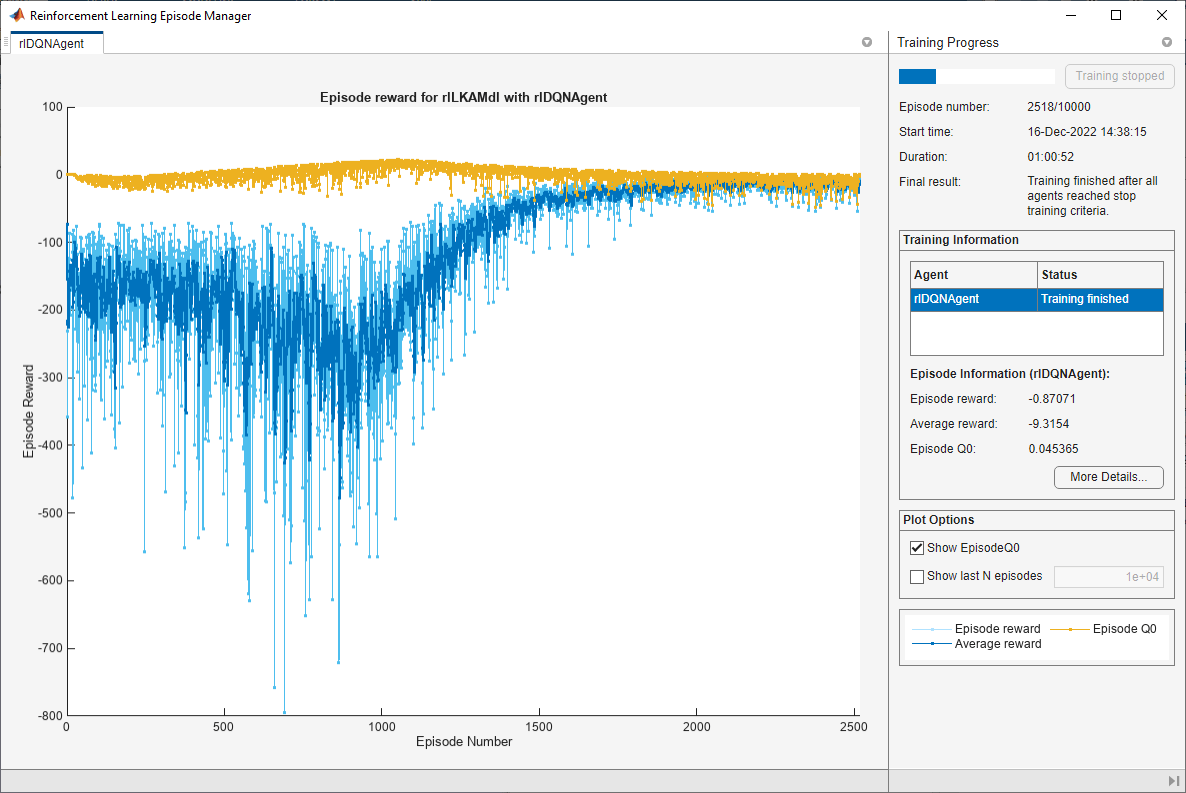
Reinforcement learning is a goal-directed computational learning approach where an agent learns to perform a task by interacting with an unknown dynamic environment. During training, the learning algorithm updates the agent policy parameters. The goal of the learning algorithm is to find an optimal policy that maximizes the expected cumulative discounted long-term reward received during the task.
This learning approach enables the agent to make a series of decisions to maximize the cumulative reward for a task without human intervention and without being explicitly programmed to achieve a goal. You can create and train reinforcement learning agents using Reinforcement Learning Toolbox™ software.
For more information, see What Is Reinforcement Learning? (Reinforcement Learning Toolbox).
Topics
- What Is Reinforcement Learning? (Reinforcement Learning Toolbox)
Reinforcement learning is a goal-directed computational approach where a computer learns to perform a task by interacting with an uncertain dynamic environment. - Reinforcement Learning Workflow (Reinforcement Learning Toolbox)
Typical workflow you use to apply reinforcement learning to a problem. - Reinforcement Learning Environments (Reinforcement Learning Toolbox)
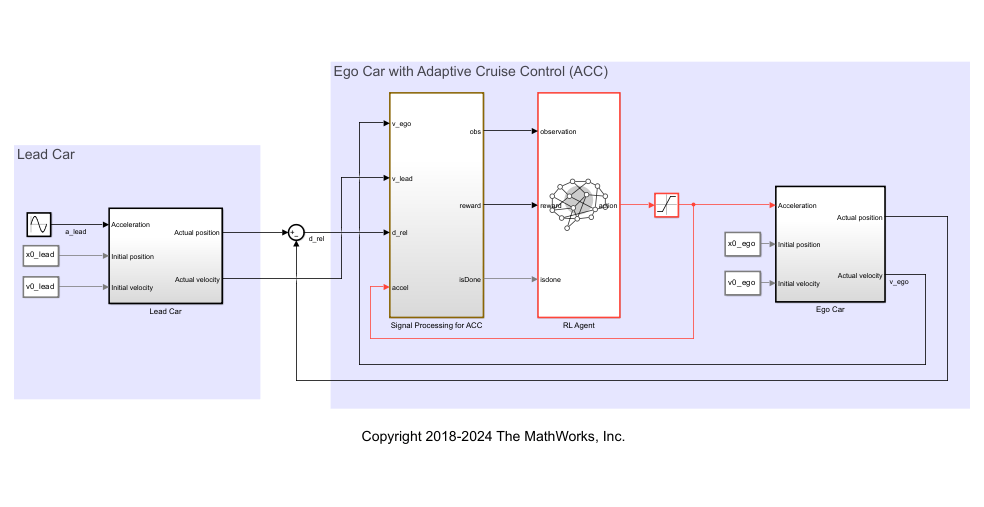
Model environment dynamics using a MATLAB® object that generates rewards and observations in response to agents actions. - Reinforcement Learning for Control Systems Applications (Reinforcement Learning Toolbox)
You can train a reinforcement learning agent to control a plant. - Train Reinforcement Learning Agent in MDP Environment (Reinforcement Learning Toolbox)
Train a reinforcement learning agent in a generic Markov decision process environment. - Train Reinforcement Learning Agent in Basic Grid World (Reinforcement Learning Toolbox)
Train Q-learning and SARSA agents to solve a grid world in MATLAB. - Design and Train Agent Using Reinforcement Learning Designer (Reinforcement Learning Toolbox)
Design and train a DQN agent for a cart-pole system using the Reinforcement Learning Designer app. - Create DQN Agent Using Deep Network Designer and Train Using Image Observations (Reinforcement Learning Toolbox)
Create a reinforcement learning agent using the Deep Network Designer app from the Deep Learning Toolbox™. - Train DDPG Agent to Swing Up and Balance Pendulum with Image Observation (Reinforcement Learning Toolbox)
Train a DDPG agent using an image-based observation signal. - Control Water Level in a Tank Using a DDPG Agent (Reinforcement Learning Toolbox)
Train a controller using reinforcement learning with a plant modeled in Simulink® as the training environment.
Featured Examples
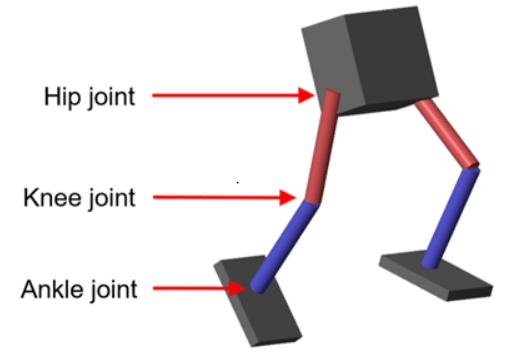

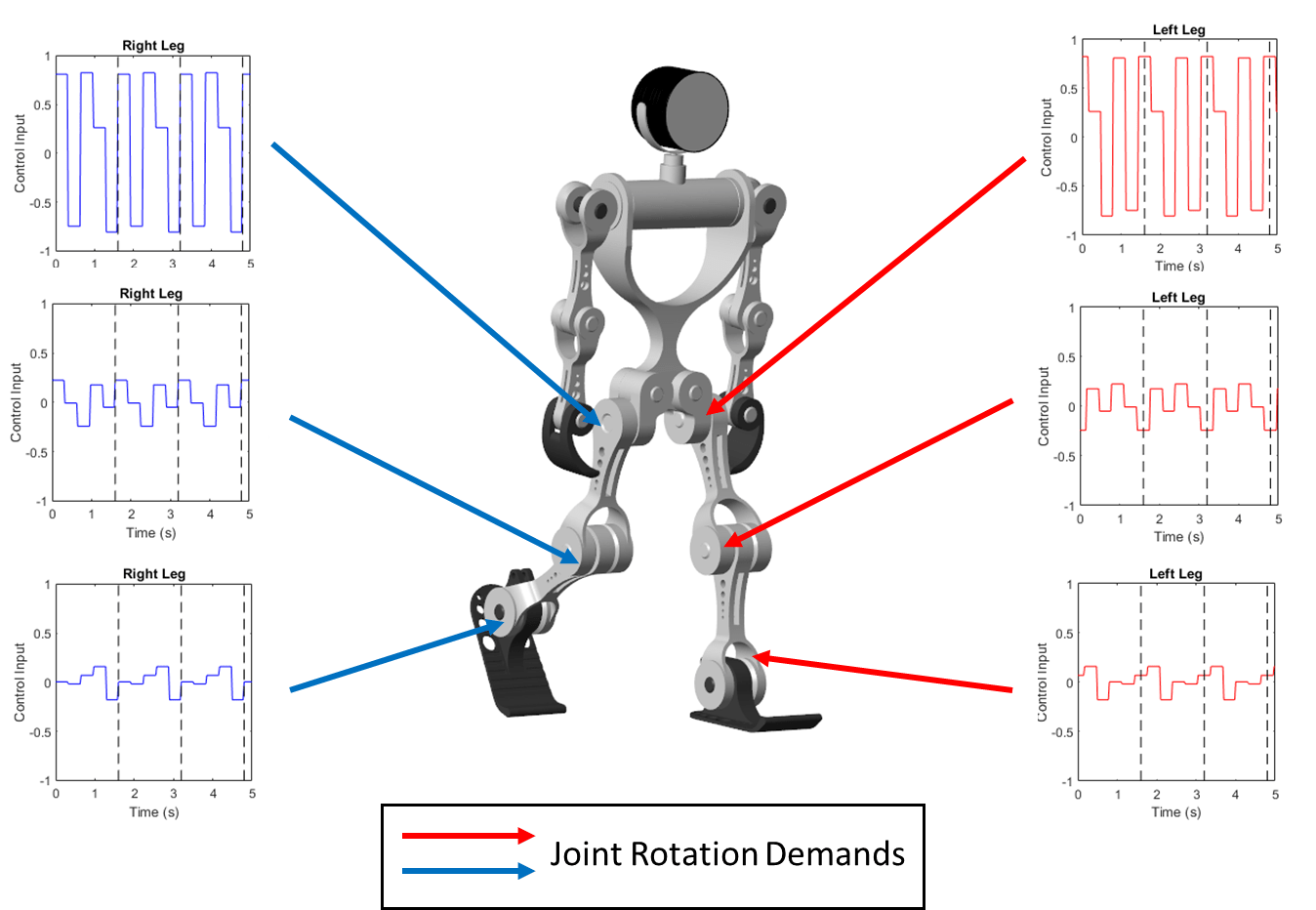
Train Humanoid Walker
Model a humanoid robot using Simscape Multibody™ and train it using either a genetic algorithm (which requires a Global Optimization Toolbox license) or reinforcement learning (which requires Deep Learning Toolbox™ and Reinforcement Learning Toolbox™ licenses).
(Simscape Multibody)