Zuzana Kukelova (original) (raw)
About Me
Who Am I?
I am an assistant professor at Czech Technical University in Prague, working in the fields of Computer Vision and Algebraic Geometry. My research is focused on algebraic methods for solving systems of polynomial equations with applications in camera geometry estimation and robotics. Recently I received a GAČR JUNIOR STAR 5-year grant to support my own research team of 3 PhD students and 2 Postdocs working on the topic of combining learning-based and algebraic approaches for camera geometry estimation.

Minimal Problems
Algebraic geometry
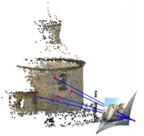
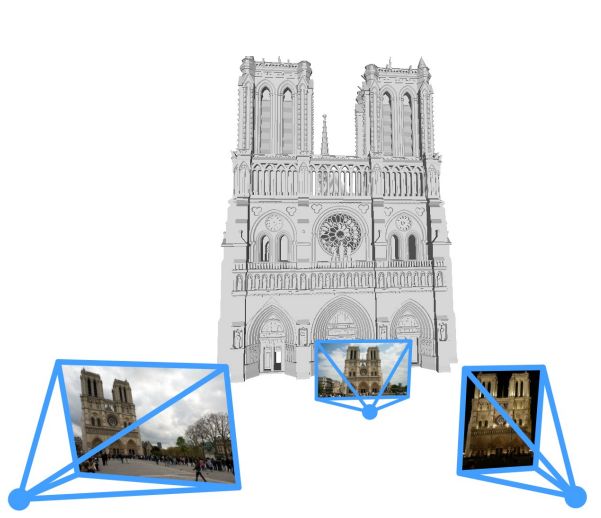
Camera Geometry

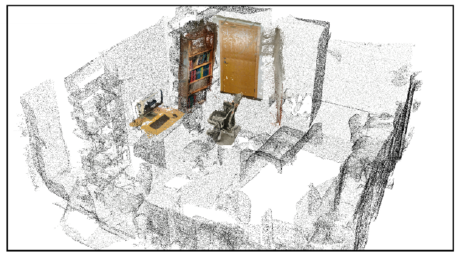
3D Reconstruction
Open PhD and Postdoc positions. Send CV and transcripts by email to apply.
CVPR 2023 Papers
K. Chelani, T. Sattler, F. Kahl, Z. Kukelova, Privacy-Preserving Representations are not Enough: Recovering Scene Content from Camera Poses [Paper]
V. Panek, Z. Kukelova, T. Sattler, Visual Localization using Imperfect 3D Models from the Internet [webpage] [github] [Paper]
Recipient of a GAČR JUNIOR STAR grant December 2021
![]()
Project Title: New generation of camera geometry solvers ,
Open PhD and PostDoc Positions (Topic: Combining Learning-based and Algebraic Approaches for Camera Geometry Estimation).
JUNIOR STAR grants are intended for excellent scientists in their early careers. The 5-year project allows them to receive up to CZK 25 million and gives them an opportunity to attain scientific independence or even start their own research team, which can bring new areas of research into Czech science.
Recent Projects
Recent Projects
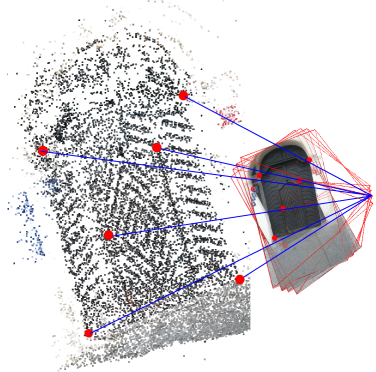
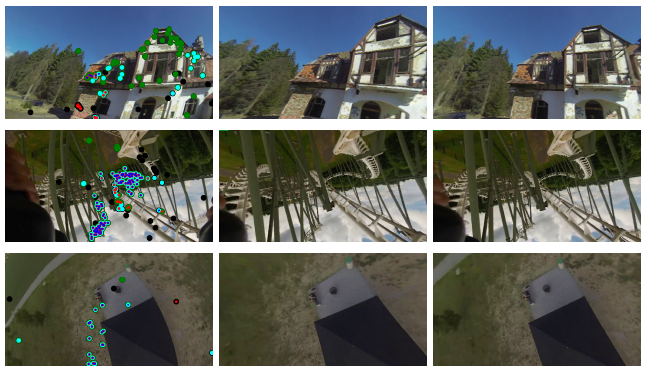
Visual Localization using 3D Models from the Internet
Benchmark for visual localization on imperfect 3D mesh models
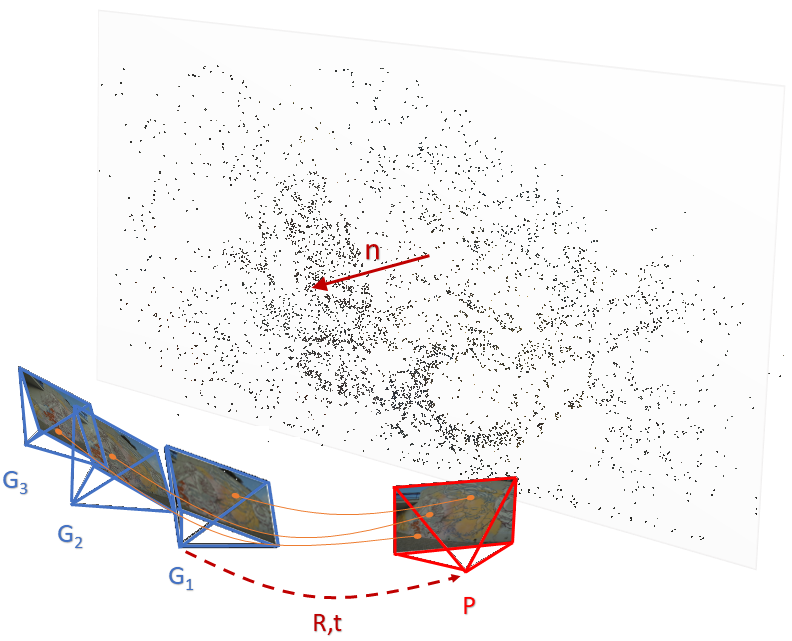
Semi-generalized homography
Registering a perspective camera w.r.t. a generalized camera.
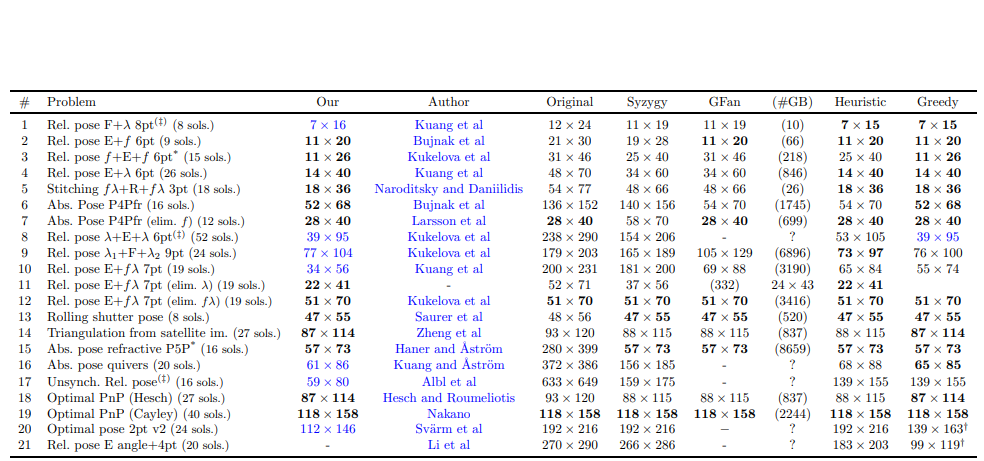
Automatic generator of sparse resultant-based solvers
Automatic generator of sparse resultant-based solver for minimal problems
Rolling shutter absolute pose solvers
Code for different rolling shutter absolute pose solvers
![]()
Rectification from Coplanar Repeats
Image rectification pipeline and minimal solvers based on coplanar repeats
From two rolling shutters to one global shutter
RS distortion correction using 2 cameras with different rolling shutter directions.
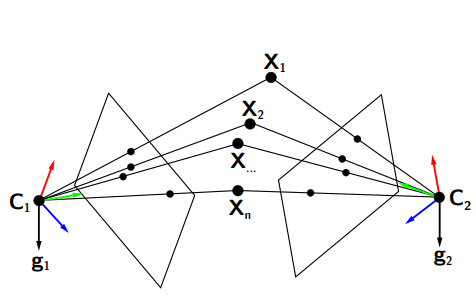
Globally Optimal Relative Pose Estimation with Gravity Prior
Globally optimal solver for relative pose estimation with know gravity firection
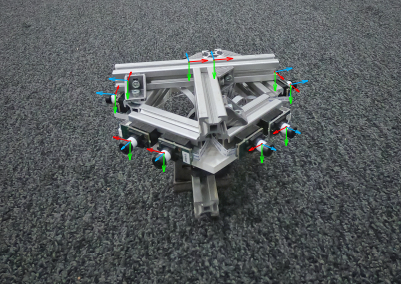
Multi-camera calibration
Infrastructure-based Multi-Camera Calibration using Radial Projections
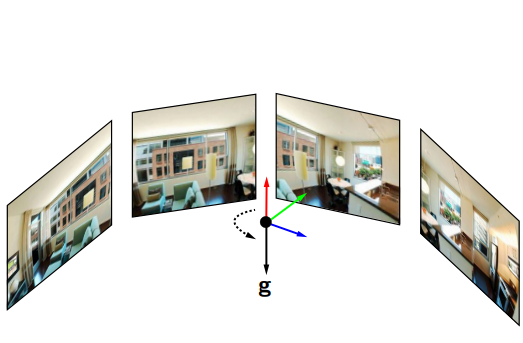
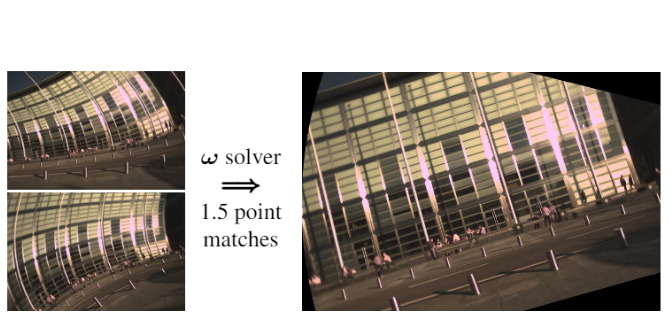
Panoramic stitching with gravity prior
Minimal Solutions for Panoramic Stitching Given Gravity Prior
[github] [paper]
Journal Publications

J. Pritts, Z. Kukelova, V. Larsson, Y. Lochman, O. Chum
Minimal Solvers for Rectifying from Radially-Distorted Conjugate Translations.
IEEE Trans. Pattern Analysis and Machine Intelligence, 2020, DOI: 10.1109/TPAMI.2020.2992261 [pdf|code] IF 6.071
J. Pritts, Z. Kukelova, V. Larsson, Y. Lochman, O. Chum
Minimal Solvers for Rectifying from Radially-Distorted Scales and Change of Scales.
International Journal of Computer Vision, 128, 950–968, 2020 [pdf|code] IF 6.071
C. Albl, Z. Kukelova, V. Larsson, T. Pajdla
Rolling Shutter Camera Absolute Pose.
IEEE Trans. Pattern Analysis and Machine Intelligence, Volume: 42, Issue: 6, 2020 [html|code] IF 17.73
F. Šrajer, Z. Kukelova, A Fitzgibbon
A Benchmark of Selected Algorithmic Differentiation Tools on Some Problems in Computer Vision and Machine Learning.
Optimization Methods and Software, February 2018 [pdf] IF 1.183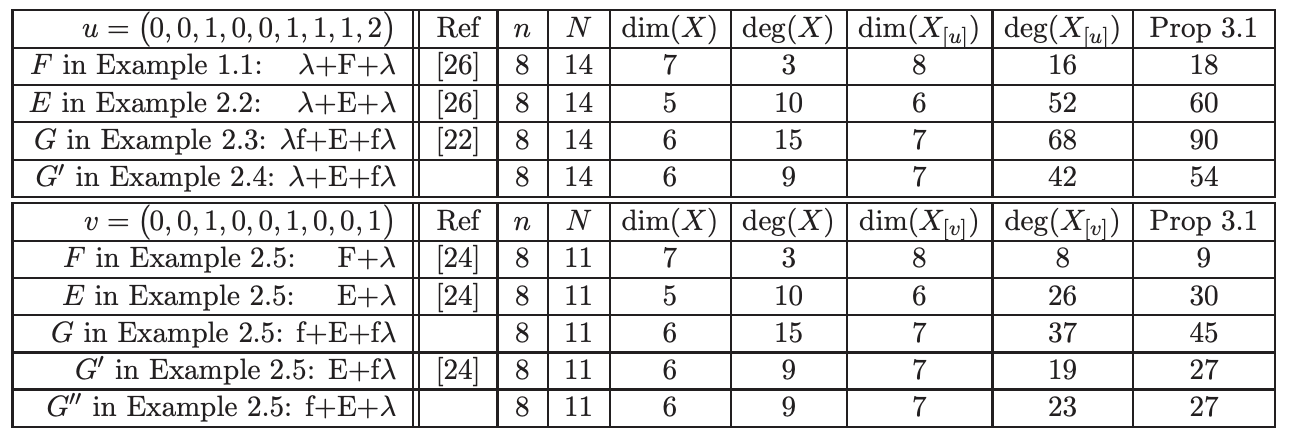
J. Kileel, Z. Kukelova, T. Pajdla, B. Sturmfels
Distortion varieties.
Foundations of Computational Mathematics, 18, pages1043–1071 (2018) [html|pdf] IF 2.829
Z. Kukelova, M. Bujnak, T. Pajdla
Polynomial Eigenvalue Solutions to Minimal Problems in Computer Vision.
IEEE Trans. Pattern Analysis and Machine Intelligence, 2012, DOI: 10.1109/TPAMI.2011.230 [html|pdf] Spotlight Paper, IF 4.795
Z. Kukelova, T. Pajdla
A Minimal Solution to Radial Distortion Autocalibration.
IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 33, no. 12, pp. 2410-2422, Dec. 2011 [html|pdf] IF 4.908
Z. Kukelova, M. Byrod, K. Josephson, T. Pajdla, K. Astrom
Fast and robust numerical solutions to minimal problems for cameras with radial distortion
Computer Vision and Image Understanding, vol. 114, no. 2, pp. 234-244, Feb. 2010. [html|pdf] IF 2.404
Conference papers
2023
K. Chelani, T. Sattler, F. Kahl, Z. Kukelova
Privacy-Preserving Representations are not Enough: Recovering Scene Content from Camera Poses
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'23), 2023 [pdf]
V. Panek, Z. Kukelova, T. Sattler
Visual Localization using Imperfect 3D Models from the Internet
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'23), 2023 [pdf | webpage]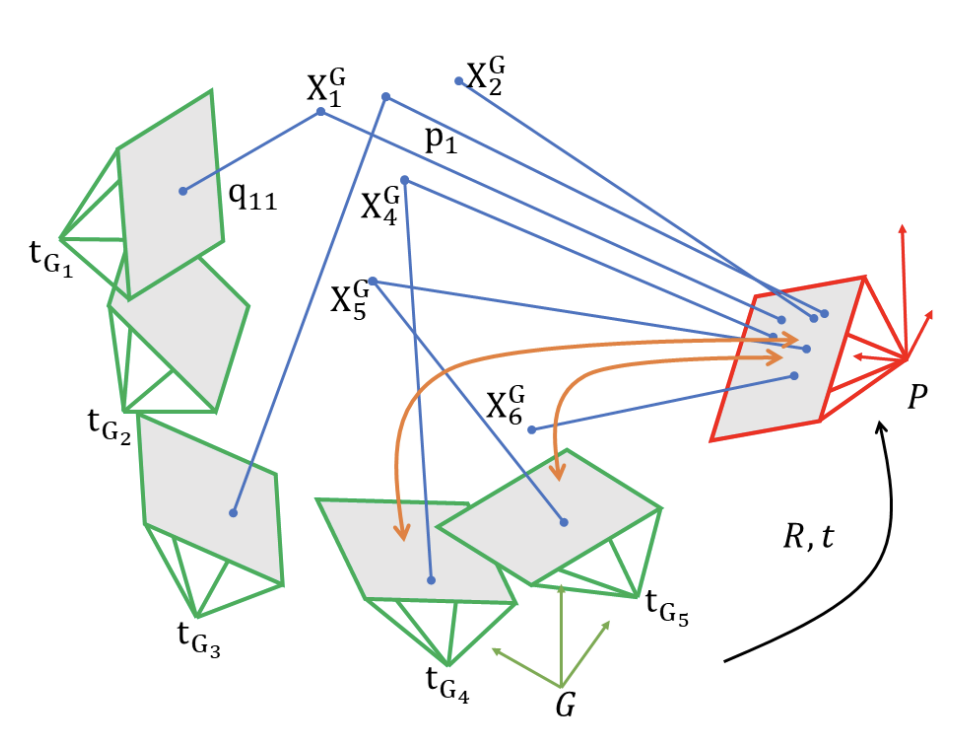
S. Bhayani, T. Sattler, V. Larsson, J. Heikkilä, Z. Kukelova
Partially calibrated semi-generalized pose from hybrid point correspondences
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV'23), 2023 [pdf | supp]
2022
D. Barath, Z. Kukelova
Relative Pose from SIFT Features
In European Conference on Computer Vision (ECCV’22), 2022 [pdf | supp]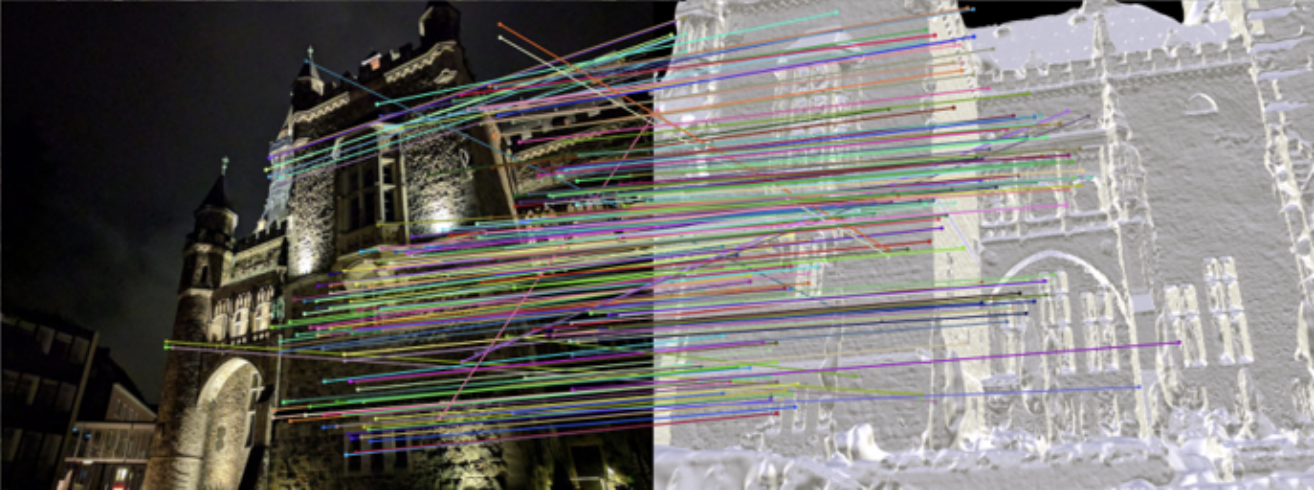
V. Panek, Z. Kukelova, T. Sattler
MeshLoc: Mesh-Based Visual Localization
In European Conference on Computer Vision (ECCV’22), 2022 [pdf | code | supp]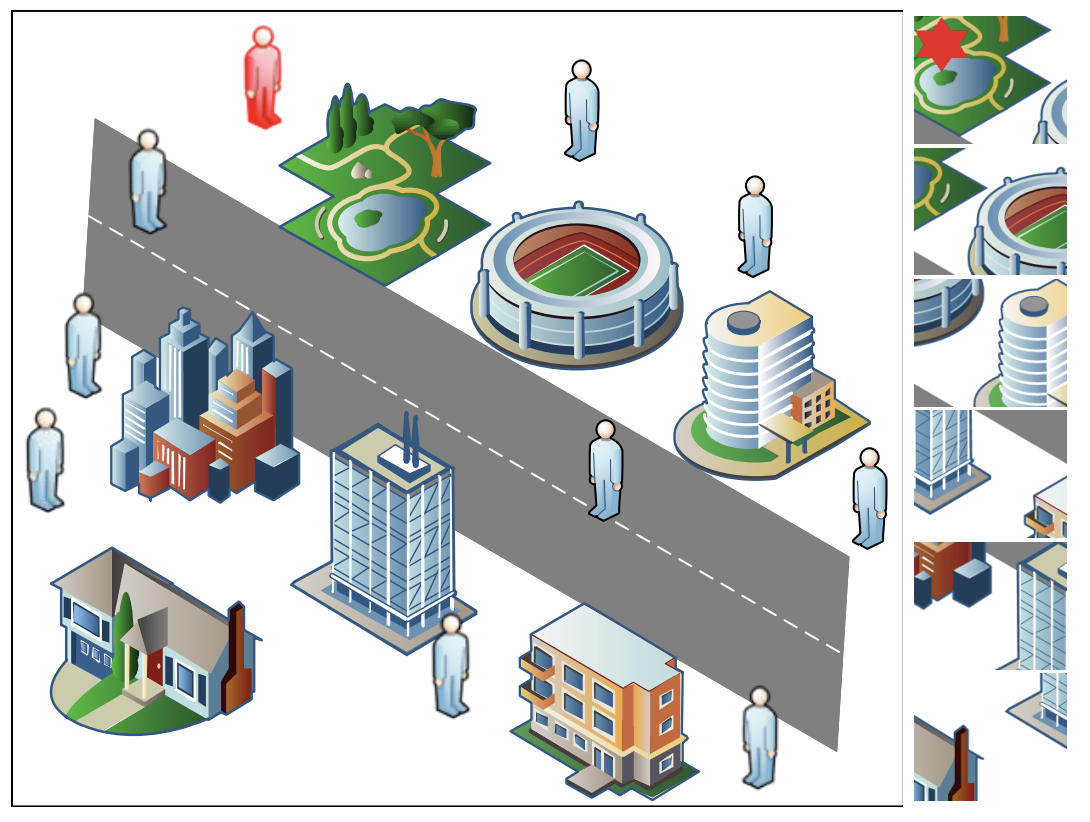
Y. Ding, D. Barath, J. Yang, Z. Kukelova
Relative Pose From a Calibrated and an Uncalibrated Smartphone Image
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'22), 2022 [pdf | code | supp]
2021
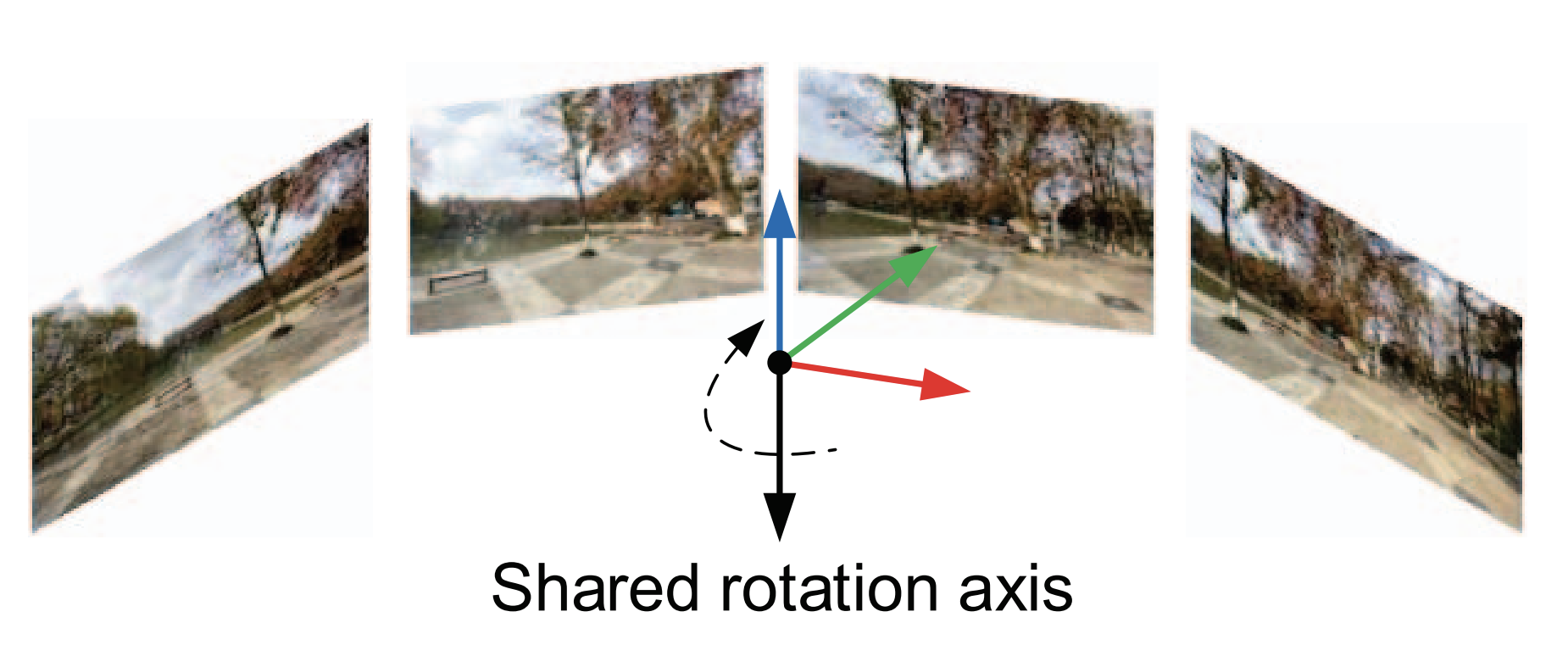
D. Barath, Y. Ding, Z. Kukelova, V. Larsson
Image Stitching with Locally Shared Rotation Axis
In International Conference on 3D Vision (3DV'21), 2021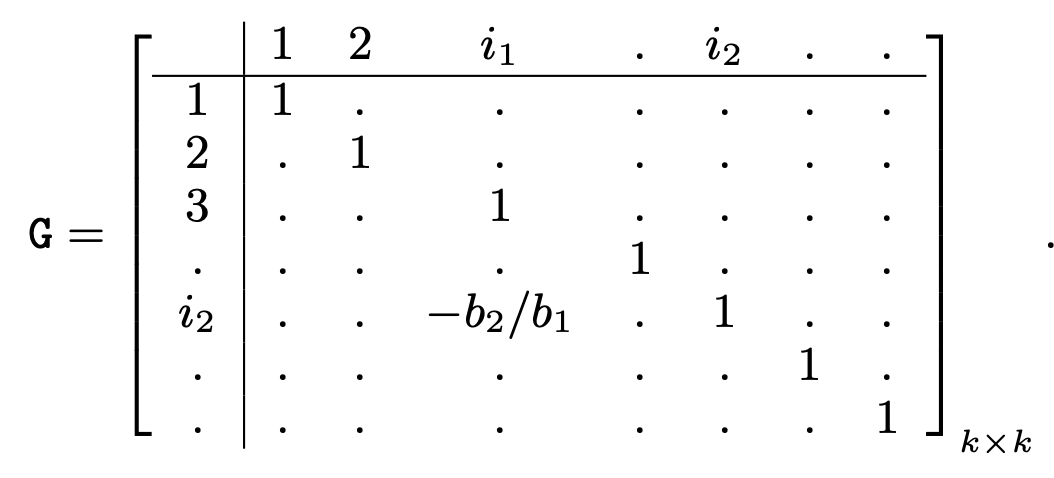
S. Bhayani, Z. Kukelova, J. Heikkilä
Computing stable resultant-based minimal solvers by hiding a variable
International Conference on Pattern Recognition (ICPR'21), 2021 [pdf]
S. Bhayani, T. Sattler, D. Barath, P. Beliansky, J. Heikkilä, Z Kukelova
Calibrated and Partially Calibrated Semi-Generalized Homographies
IEEE/CVF International Conference on Computer Vision (ICCV’21), 2021 [pdf | code | video]
[Oral presentation, Acceptance rate 3%]
Y. Ding, D. Baráth, Z. Kukelova
Minimal Solutions for Panoramic Stitching Given Gravity Prior
IEEE/CVF International Conference on Computer Vision (ICCV’21), 2021 [pdf | code | video | dataset]
[Oral presentation, Acceptance rate 3%]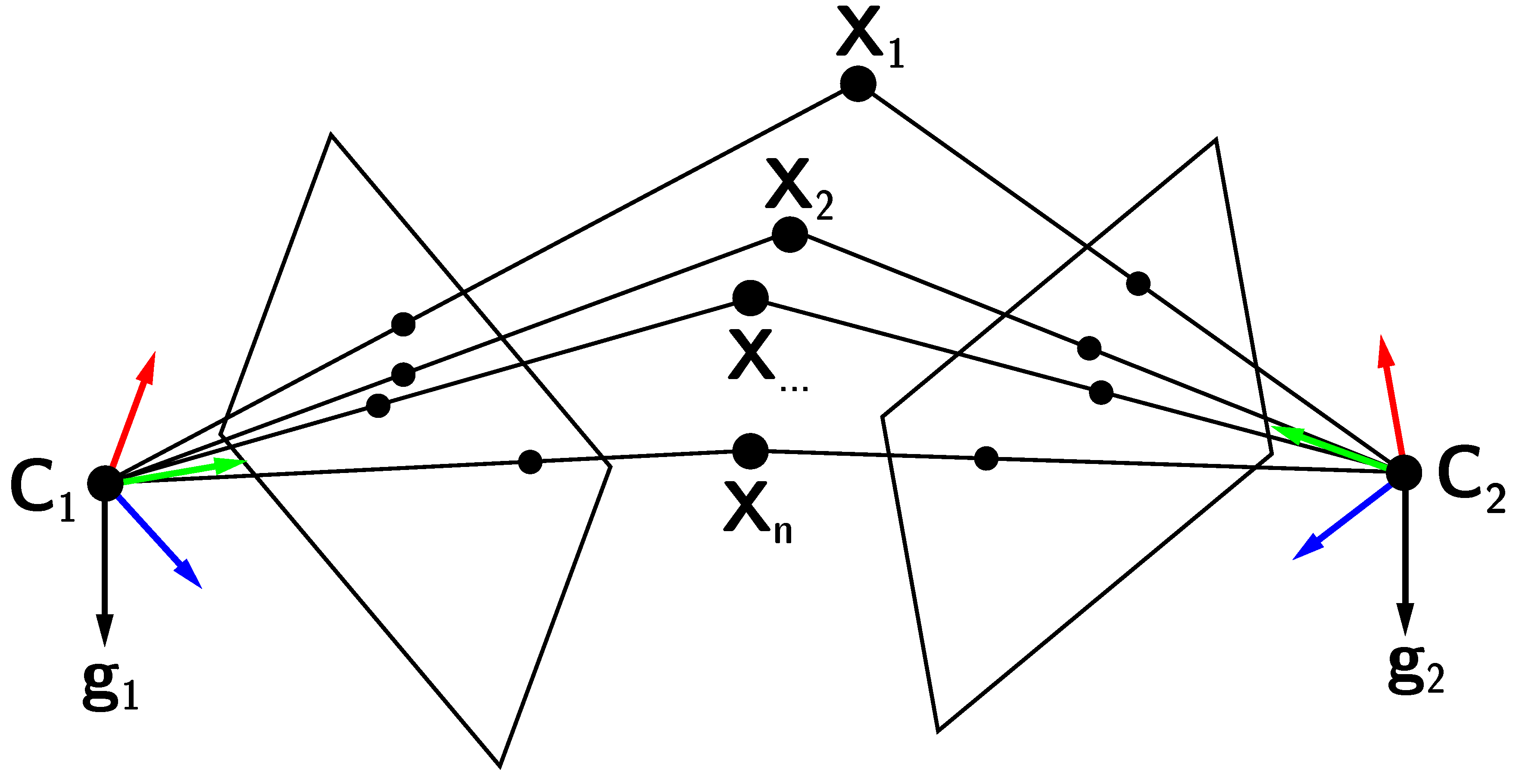
Y. Ding, D. Baráth, Z. Kukelova
Globally Optimal Relative Pose Estimation with Gravity Prior
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'21), 2021 [pdf | code | video | dataset]
2020
Z. Kukelova, C. Albl, A. Sugimoto, K. Schindler, T. Pajdla
Minimal rolling shutter absolute pose with unknown focal length and radial distortion
In European Conference on Computer Vision (ECCV’20), 2020 [pdf | code]
Y. Lin, V. Larsson, M. Geppert, Z. Kukelova, M. Pollefeys, T. Sattler
Infrastructure-based multi-camera calibration using radial projections
In European Conference on Computer Vision (ECCV’20), 2020 [pdf | code]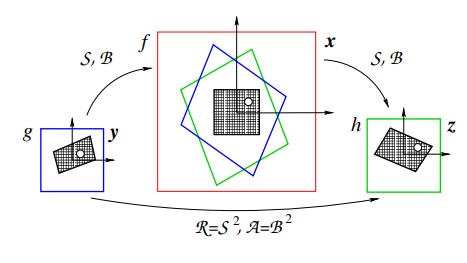
D. Barath, M. Polic, W. Förstner, T. Sattler, T. Pajdla, Z. Kukelova
Making affine correspondences work in camera geometry computation
In European Conference on Computer Vision (ECCV’20), 2020 [pdf | code]
C. Albl, Z. Kukelova, V. Larsson, M. Polic, T. Pajdla, K. Schindler
From two rolling shutters to one global shutter
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'20), 2020 [pdf | code | video | webpage]
[Oral presentation, Acceptance rate 5.7%]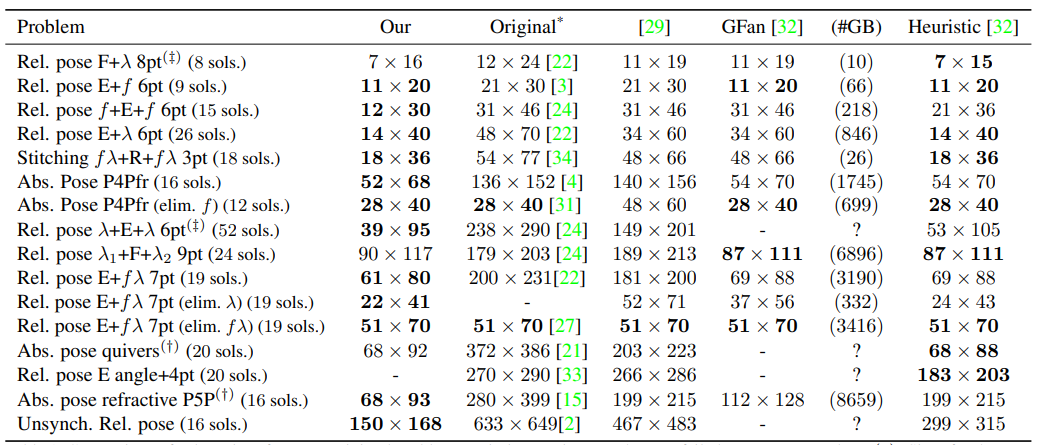
S. Bhayani, Z. Kukelova, J. Heikkilä
A sparse resultant based method for efficient minimal solvers
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'20), 2020 [pdf | code | video]
M. Polic, S. Steidl, Z. Kukelova, C. Albl, T. Pajdla
Uncertainty Based Camera Model Selection
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR'20), 2020 [pdf | code | video]
2019

D. Barath, Z. Kukelova
Homography from two orientation- and scale-covariant features
In IEEE International Conference on Computer Vision (ICCV'19), Soul, Korea, 2019 [pdf | code]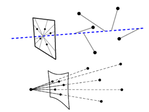
V. Larsson, T. Sattler, Z. Kukelova, M. Pollefeys
Revisiting Radial Distoriton Absolute Pose
In IEEE International Conference on Computer Vision (ICCV'19), Soul, Korea, 2019 [pdf | code]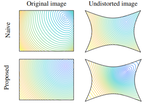
Z. Kukelova, V. Larsson
Radial Distoriton Triangulation
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'19), Long Beach, USA, 2019 [pdf]
2018

J. Pritts, Z. Kukelova, V. Larsson, O. Chum
Rectification from Radially-Distorted Scales
In 14th Asian Conference on Computer Vision (ACCV'18), Perth, Australia, 2018 [pdf | code]
[Oral presentation, Saburo Tsuji Best Paper Award]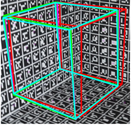
Z. Kukelova, C. Albl, A. Sugimoto, T. Pajdla
Linear solution to the minimal absolute pose rolling shutter problem
In 14th Asian Conference on Computer Vision (ACCV'18), Perth, Australia, 2018 [pdf]
V. Larsson, M. Oskarsson, K. Astroem, A. Wallis, Z. Kukelova, T. Pajdla
Beyond Gröbner Bases: Basis Selection for Minimal Solvers
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'18), SLC, USA, 2018 [pdf | video]
V. Larsson, Z. Kukelova, Y. Zheng
Camera Pose Estimation with Unknown Principal Point
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'18), SLC, USA, 2018 [pdf | supp]
J. Pritts, Z. Kukelova, V. Larsson, O. Chum
Radially-Distorted Conjugate Translations
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'18), SLC, USA, 2018 [pdf | code]
2017
V. Larsson, Z. Kukelova, Y. Zheng
Making Minimal Solvers for Absolute Pose Estimation Compact and Robust
In IEEE International Conference on Computer Vision (ICCV'17), Venice, Italy, 2017 [pdf | supp]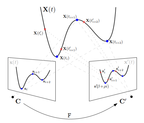
C. Albl, Z. Kukelova, A. Fitzgibbon, J. Heller, M. Smid, T. Pajdla
On the Two-View Geometry of Unsynchronized Cameras
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'17), Honolulu, USA, 2017 [pdf | supp | poster]
Z. Kukelova, J. Kileel, T. Pajdla, B. Sturmfels
A Clever Elimination Strategy for Efficient Minimal Solvers
In IEEE Conference on Computer Vision and Pattern Recognition (CVPR'17), Honolulu, USA, 2017 [pdf | supp | poster]
Older publications
Older publications are available on my Google Scholar page.
Awards
2018
Saburo Tsuji Best Paper Award - The 14th Asian Conference on Computer Vision2015
The winner of the 2015 Cor Baayen Award - an annual award given to a promising young researcher in computer science and applied mathematics by ERCIM – The European Research Consortium for Informatics and Mathematics2014
Best Paper Honourable Mention - The 12th Asian Conference on Computer Vision2013
The best PhD dissertation in cybernetics and informatics in the Czech Republic - The winner of CSKI (Czech Society for Cybernetics and Informatics) prize in 20132013
Dean prize for prestigious PhD thesis2012
Spotlight Paper for the July 2012 issue of the IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
Supervision
Charalampos Tzamos
Topic: Combining Algebraic and Learning-based Approaches for Camera Geometry Estimation (2022-now)Michal Polic
(co-supervision 50%), Topic: Uncertainty in Structure from Motion Algorithms (submitted 2023)James Pritts
(co-supervision 50%), Topic: Rectification from coplanar repeats (defended in 2020)Čeněk Albl
(co-supervision 50%), Topic: 3D reconstruction with time-variant geometry (defended in 2019)
Community Service
General Chair
International Conference on 3D Vision (3DV) 2022Program Chair
European Conference on Computer Vision (ECCV) 2026, 3DV 2020, 23rd Computer Vision Winter Workshop (CVWW 2018), 19th Computer Vision Winter Workshop (CVWW 2014)Area Chair
CVF/IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) 2023, Asian Conference on Computer Vision (ACCV) 2022, CVPR 2022, ACCV 2020, 3DV 2019, 3DV 2018Guest editor
International Journal of Computer Vision (IJCV) Special Issue on 3D Computer Vision
Karlovo namesti 13, Prague 2. (G-10a)