Affirmative Large Language Model-Based Dialogue Robots for Broadening or Deepening the Perspective of Children (original) (raw)
Abstract
This study aims to establish a method for designing dialogue robots that can broaden or deepen the perspectives of children. Previous research has suggested that artificial intelligence (AI) can broaden or deepen perspectives by facilitating critical dialogues. Critical thinking emphasizes not only counterarguments, but also appropriate evaluations and affirmations. However, the development and validation of AI and robots that consider this aspect has been insufficient. Therefore, this study hypothesizes that robots that affirm the opinions of children while presenting new perspectives can broaden or deepen their viewpoints. We introduced dialogue robots in primary school science classes to verify this hypothesis. Both subjective evaluations by the children and objective evaluations by third parties confirmed that the proposed approach promotes broadening or deepening the perspectives of children and improves the impression of the robot (anthropomorphism, likeability, and perceived intelligence). Furthermore, we found that, through the medium of likeability, the subjective evaluation of broadening or deepening the perspective is enhanced, and also the objective evaluation might be improved. This study provides valuable insight into the design of dialogue robots that can broaden or deepen the perspective of children.
1 Introduction
Recently, the necessity of education that broadens or deepens the perspectives of children has been emphasized. Education for sustainable development (ESD) has emerged to address the escalating challenges of sustainability through education [1], which UNESCO promotes internationally [2]. It utilizes action-based and innovative pedagogical methods, empowering learners to gain understanding, raise their awareness, and actively contribute to transforming the society toward greater sustainability [1]. One success of ESD is equipping children to think from diverse perspectives [1]. Interactive activities are important for broadening or deepening their perspectives [3]. Although it would be ideal for teachers to intervene for each student and provide such activities, this approach is unrealistic from the perspective of physical and human resource costs. One previous study aimed to promote discussions among students [4]. However, if the knowledge of students is insufficient, teacher support is still necessary [5].
Introducing artificial intelligence (AI) and robot technologies into educational practices can offer promising solutions to these challenges. Many studies on AI and human-robot interaction have demonstrated that they can have educational benefits ([[6](#ref-CR6 "Auerbach JE, Concordel A, Kornatowski PM, Floreano D (2019) Inquiry-based learning with RoboGen: an open-source software and hardware platform for robotics and artificial intelligence. IEEE Trans Learn Technol 12(3):356–369. https://doi.org/10.1109/TLT.2018.2833111
"),[7](#ref-CR7 "Chen H, Park HW, Breazeal C (2020) Teaching and learning with children: impact of reciprocal peer learning with a social robot on children’s learning and emotive engagement. Comput Educ 150:103836.
https://doi.org/10.1016/j.compedu.2020.103836
"),[8](#ref-CR8 "Chen B, Hwang G-H, Wang S-H (2021). Accessed 2024-11-12 Gender differences in cognitive load when applying game-based learning with intelligent robots. Educ Technol Soc 24(3):102–115.
https://www.jstor.org/stable/27032859
"),[9](#ref-CR9 "Fournier-Viger P, Nkambou R, Nguifo EM, Mayers A, Faghihi U. (2013) A multiparadigm intelligent tutoring system for robotic arm training. IEEE Trans Learn Technol 6(4):364–377.
https://doi.org/10.1109/TLT.2013.27
"),[10](#ref-CR10 "Fridin M (2014) Storytelling by a kindergarten social assistive robot: a tool for constructive learning in preschool education. Comput Educ 70:53–64.
https://doi.org/10.1016/j.compedu.2013.07.043
"),[11](#ref-CR11 "Kerimbayev N, Beisov N, Kovtun A, Nurym N, Akramova A (2020) Robotics in the international educational space: integration and the experience. Educ Inf Technol 25:5835–5851"),[12](#ref-CR12 "Sarika Kewalramani GK, Palaiologou I (2021) Using Artificial Intelligence (AI)-interfaced robotic toys in early childhood settings: a case for children’s inquiry literacy. Eur Early Chidhood Educ Res J 29(5):652–668.
https://doi.org/10.1080/1350293X.2021.1968458
"),[13](#ref-CR13 "Lee S, Noh H, Lee J, Lee K, Lee GG, Sagong S, Kim M (2011) On the effectiveness of robot-assisted language learning. ReCALL 23(1):25–58.
https://doi.org/10.1017/S0958344010000273
"),[14](#ref-CR14 "Martínez-Tenor AC-M, Fernández-Madrigal J-A (2019) Teaching machine learning in robotics interactively: the case of reinforcement learning with Lego® Mindstorms. Interact Learn Env 27(3):293–306.
https://doi.org/10.1080/10494820.2018.1525411
"),[15](#ref-CR15 "Mitnik R, Nussbaum M, Recabarren M (2009) Developing cognition with collaborative robotic activities. Br J Educ Technol Soc 12(4):317–330. Accessed 2024-11-12"),[16](#ref-CR16 "Mitnik R, Recabarren M, Nussbaum M, Soto A (2009) Collaborative robotic instruction: a graph teaching experience. Comput Educ 53(2):330–342.
https://doi.org/10.1016/j.compedu.2009.02.010
"),[17](#ref-CR17 "Salas-Pilco SZ (2020) The impact of AI and robotics on physical, social-emotional and intellectual learning outcomes: an integrated analytical framework. Br J Educ Technol 51(5):1808–1825.
https://doi.org/10.1111/bjet.12984
.
https://berajournals.onlinelibrary.wiley.com/doi/pdf/10.1111/bjet.12984
"),[18](#ref-CR18 "Belpaeme T, Tanaka F (2021) Social robots as educators. In: OECD digital education outlook 2021 pushing the frontiers with artificial intelligence, blockchain and robots. p 143"),[19](/article/10.1007/s12369-025-01331-5#ref-CR19 "Chu S-T, Hwang G-J, Tu Y-F (2022) Artificial intelligence-based robots in education: a systematic review of selected SSCI publications. Comput Educ: Artif Intel 3:100091")\]). Unlike humans, robots possess consistent abilities and provide continuous support without fatigue \[[20](/article/10.1007/s12369-025-01331-5#ref-CR20 "Al Hakim VG, Yang S-H, Liyanawatta M, Wang J-H, Chen G-D (2022) Robots in situated learning classrooms with immediate feedback mechanisms to improve students’ learning performance. Comput Educ 182:104483")\]. Moreover, it has been suggested that AI could support teachers in fostering creativity, critical thinking, and problem solving in schools and educational settings \[[21](/article/10.1007/s12369-025-01331-5#ref-CR21 "Benvenuti M, Cangelosi A, Weinberger A, Mazzoni E, Benassi M, Barbaresi M, Orsoni M (2023) Artificial intelligence and human behavioral development: a perspective on new skills and competences acquisition for the educational context. Comput Hum Behav 148:107903")\]. Consequently, the incorporation of AI and robots into educational environments is expected to support teachers, ultimately promoting support for education of children.Critical dialogue is an effective way to broaden or deepen perspectives of children. A previous study suggested that AI could enhance the perspectives of users by promoting critical dialogues [22]. Critical thinking is essentially the capacity for analytical thought and serves as a vital component for personal civic involvement and economic achievement [23]. Future citizens are anticipated to cultivate critical thinking skills, as these abilities significantly influence the advancement of innovation [24]. In critical thinking, not only refutation, but also appropriate evaluation and affirmation are important [25]. However, the development and exploration of AI and robots that consider this aspect remain insufficient. Uchida et al. [[26](/article/10.1007/s12369-025-01331-5#ref-CR26 "Uchida T, Minato T, Ishiguro H (2016) A values-based dialogue strategy to build motivation for conversation with autonomous conversational robots. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp 206–211). https://doi.org/10.1109/ROMAN.2016.7745112
")\] conducted a study on impression changes based on the ratio of agreement and disagreement by robots; however, it was in a non-interactive video-based setting, that did not achieve dialogues that could broaden or deepen perspectives. The evaluation criteria were limited to dialogue motivation, affinity, and intentionality.Based on these observations, this study hypothesizes that robots can broaden or deepen the perspectives of children by affirming their opinions while introducing new viewpoints. The main contribution of this study is the establishment of a design method for dialogue robots aimed at broadening or deepening children’s perspectives.
The following sections will first discuss related research clarifying this study’s originality, then describe the development of the dialogue robot, followed by an experiment in a primary school to verify the hypothesis using the developed robots. Finally, we will discuss the results of the experiment.
2 Related Research
2.1 Educational AI/Robots that Focus on Knowledge Acquisition and Cognitive Skills Development
Numerous studies have investigated the impact of introducing robots into the field of education. For instance, having children speak English to robots enhances their English vocabulary learning [27]. Another study found that introducing an English-speaking robot in an elementary school improved the English learning of children [28]. A robot also improves children’s understanding of science classes by conducting quizzes and answering questions [29]. Additionally, children learned sign language by imitating the movements of a robot [30]. In the context of cognitive skills development, a previous study proposed a robot that supports self-regulated learning in primary school children [31]. Recently, various studies on confusion assistance have focused on utilizing large language models (LLMs) to generate instructional guidance or hints that enable students to solve problems by themselves [32,33,34,35]. Although these studies demonstrate various ways in which educational AI and robots can be significant in knowledge acquisition or cognitive skill development, methods to broaden or deepen perspectives as well as their effects have not been sufficiently examined.
2.2 Educational AI/Robots that Focus on Discussion
Dialogue robots and LLMs that engage in discussions with humans are under continuous development. Introducing teleoperated robots into an elementary school class made the class more active through interactions between the children and the robot [36]. Comparisons between debates among humans and those between humans and LLMs on online chat platforms revealed that LLMs were more persuasive than humans [37]. Furthermore, debating with LLMs reduced beliefs in conspiracy theories [38]. However, these studies have not been sufficiently examined methods to broaden or deepen perspectives of children in educational settings.
A previous study developed robots that promote critical thinking, where individuals objectively analyzed their decisions and actions from various perspectives [[39](/article/10.1007/s12369-025-01331-5#ref-CR39 "Homma T, Takahashi H, Ban M, Shimaya J, Fukushima H, Moriya J (2024) Development and evaluation of the dialogue protocol aimed at improving critical thinking through online dialogue with a robot. Trans Hum Interface Soc 26(1):149–158. https://doi.org/10.11184/his.26.1_149
")\]. Additionally, there is research that focuses on using robots to enhance children’s technological critical thinking \[[40](/article/10.1007/s12369-025-01331-5#ref-CR40 "Tolksdorf NF, Wildt E, Rohlfing KJ (2024) Preschoolers’ interactions with social robots: investigating the potential for eliciting metatalk and critical technological thinking. In Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pp 1053–1057"), [41](/article/10.1007/s12369-025-01331-5#ref-CR41 "Lupetti ML, Van Mechelen M (2022) Promoting children’s critical thinking towards robotics through robot deception. In 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), IEEE, pp. 588–597")\]. Another study suggested the potential of AI to broaden the viewpoints of users by facilitating critical dialogue \[[22](/article/10.1007/s12369-025-01331-5#ref-CR22 "Ruiz-Rojas LI, Salvador-Ullauri L, Acosta-Vargas P (2024) Collaborative working and critical thinking: adoption of generative artificial intelligence tools in higher education. Sustainability 16(13):5367")\]. However, not only refutation, but also appropriate evaluation and affirmation are important in critical thinking \[[25](/article/10.1007/s12369-025-01331-5#ref-CR25 "Facione PA (2011) Critical thinking: what it is and why it counts. Insight Assess 1(1):1–23")\], and these prior studies have not sufficiently examined the effect of affirmation on broadening or deepening the perspectives of users.Affirmation in education is related to studies on positive feedback. Positive feedback has been shown to effectively shape the attitudes of students toward challenges and foster a belief in their potential for continuous growth [42,43,44,45]. This type of feedback also influences motivation, self-concept, and self-esteem [46,47,48]. However, whether affirmative AI and robots can broaden or deepen the perspectives of students has not been thoroughly investigated.
3 Methods
We conducted an experiment to verify the hypothesis that dialogue robots can broaden or deepen the perspectives of children by affirming their opinions while introducing new perspectives. In a science class, we set a discussion theme of “Living Organisms and the Environment,” which focused on the question: “Should the turtle pond be cleaned?” In this study, two robot conditions were considered. Under the control condition, the robots began each statement by refuting the child’s opinion before introducing new perspectives. The reason for selecting refuting behavior as the control condition is that this behavior is generally considered important from a critical thinking perspective. Under the proposed condition, the robots were designed to start each statement by affirming the child’s opinion before presenting new perspectives. The developed dialogue robot system, evaluation methods, and results are presented below. The study was approved by the Mie University Affiliated Primary School Research Promotion Committee.
3.1 Dialogue Robot System
This study utilized a social communication robot, CommU ([[49](/article/10.1007/s12369-025-01331-5#ref-CR49 "CommU. https://www.vstone.co.jp/products/commu/index.html
")\]; see Fig. [2](/article/10.1007/s12369-025-01331-5#Fig2)), developed jointly by the Vstone Corporation and Osaka University. The robot’s voice synthesis was powered by AITalk \[[50](/article/10.1007/s12369-025-01331-5#ref-CR50 "Aitalk Corporation. (2012)
https://www.ai-j.jp/about/
")\], which was developed by AI Corporation. CommU features 14 degrees of freedom: two in the torso, two in each arm, three in the neck, three in the eyes, one in the eyelids, and one in the mouth, enabling it to perform non-verbal actions similar to human behaviors. To evoke a lifelike presence, the robot’s arm and neck joints move slightly at regular intervals, and the eyelids also open and close periodically. The robot’s mouth opens and closes in sync with the playback of the speech audio during the speech.Figure 1 illustrates the system architecture. This system employed OpenAI’s LLM, GPT-4o [[51](/article/10.1007/s12369-025-01331-5#ref-CR51 "Hello gpt-4o. (2024) https://openai.com/index/hello-gpt-4o/
")\], to generate robot responses based on user utterances and predefined prompts. A detailed explanation of the LLM prompts is presented later. The process begins with a speech recognition module, which transcribes user speech into text and transmits it to a scenario management module. Speech recognition was performed using a Web Speech API \[[52](/article/10.1007/s12369-025-01331-5#ref-CR52 "Web Speech API. (2020)
https://wicg.github.io/speech-api/#use_cases
")\]. When the APIs speech recognition result is empty, the robot asks the user to speak again. The scenario management module then generates a dialogue scenario for the robot’s next utterance based on the user’s input. Each dialogue scenario included the utterance text, corresponding robot motion, and timing.Fig. 1
System architecture
The LLM generates the utterance text spoken by the robot. In the motion generation module, the robot’s arm movements were programmed to move up and down randomly based on the length of the spoken text. The robot’s gaze was manually adjusted to align with that of the interlocutor, and remained fixed throughout the interaction. The completed dialogue scenario was then sent to the scenario execution module, which sent speech and motion commands to the robot based on the prepared scenario.
The details of the prompts are explained below. Each prompt consists of instructions, constraints, a list of perspectives, and background knowledge. In the control condition, a list of negating phrases was included. The instructions section describes the basic settings of the dialogue robot. In the constraints section, specific differences between the conditions are outlined. In the control condition prompt, instructions specified that the robot should first negate the primary student’s opinion and then prompt them to consider aspects that were overlooked. In the proposed condition, the instructions specified that the robot must first affirm the student’s opinion and then prompt them to consider unaddressed perspectives. The list of perspectives includes viewpoints intended to create a balance between the human desire for a “clean school environment” and the environmental and ecological consideration of “preserving the ecosystem.” The background knowledge section provides an overview of the pond, which is the focus of the discussion. The prompts (translated from Japanese to English) created for both the control and proposed conditions are presented below. Bold texts indicate the different parts of each condition. At the end of each prompt, the dialogue history is inserted.
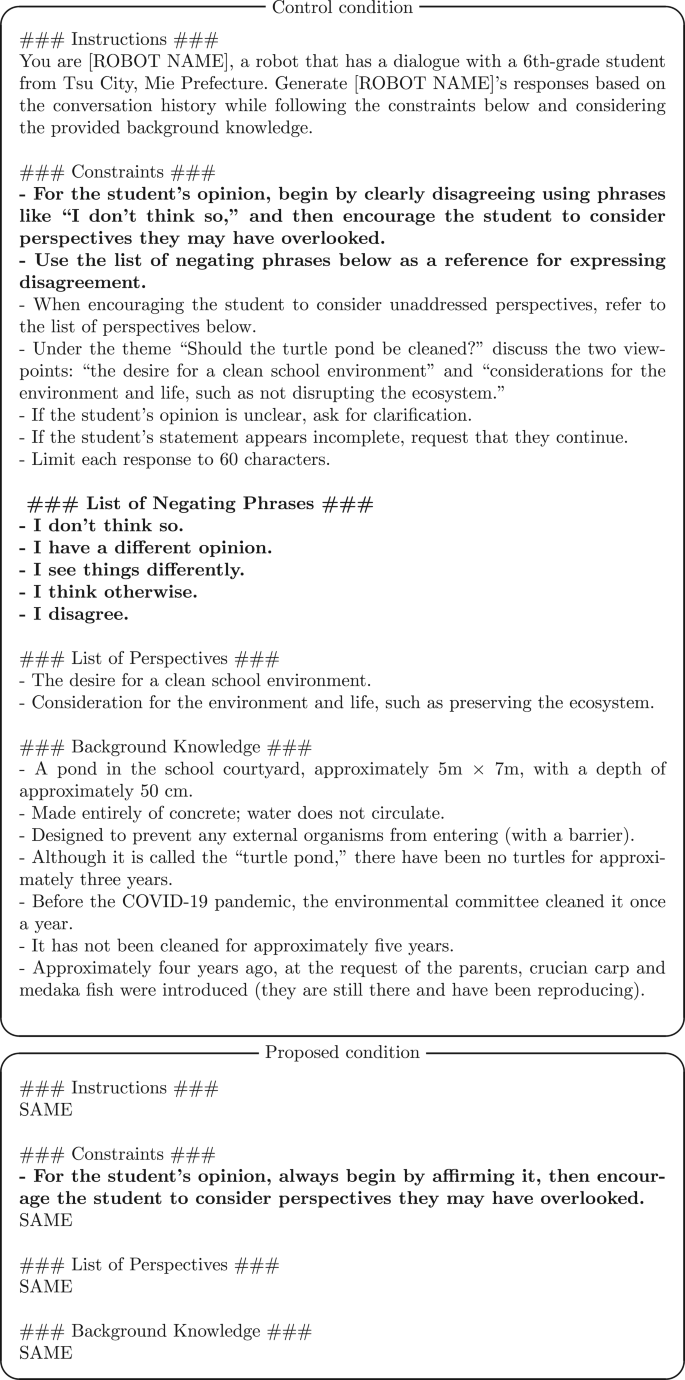
One notable point of the prompts is the bold text in the constraints parts. These texts create differences between conditions. Furthermore, since the dialogues in this study may require time for the children to think, it is important to allow them to sufficiently express their opinions before proceeding. Therefore, in cases where a child is in the middle of speaking or their response is unclear, we prepared prompts to ask them again. This also has the potential to recover from misrecognition of utterances and ends in speech recognition.
3.2 Evaluation Method
Two sixth-grade classes participated in the experiment: one was assigned to the control condition and the other to the proposed condition. Thus, this study employed a between-participants design. Two robots were introduced to each class. The experiment consisted of the following three steps.
- (1)
Describing their thoughts on the discussion topic presented at the beginning of the class on a reaction paper - (2)
Discussing in a group with/without the robot - (3)
Describing their thoughts on the reaction paper based on the discussions and answering a questionnaire on the discussion and robot in class
The procedure is explained in detail below. (1) The students recorded their thoughts in a reaction paper regarding the two opinions: whether “to artificially introduce fish” or “create a biotope where organisms gather naturally,” detailing the reasons for their choice. (2) The students formed groups of basically four and discussed their individual opinions. When it was their turn, each group discussed the topic with one of the robots. The scenes of the discussions are illustrated in Fig. 2. Within each group, mainly one representative engaged in a discussion with the robot while the other members listened to the dialogue. Except when interacting with the robot, the group discussed within themselves. (3) Subsequently, the children recorded their new thoughts on a reaction paper, considering these discussions, and responded to a questionnaire regarding their impressions of the discussion with the robot.
Fig. 2
Interaction between students and robot
To evaluate whether the perspectives of children were broadened or deepened, both objective evaluation items by third parties and subjective evaluation items by the children were prepared. For the former, the children first recorded their opinions on the topic on a comment sheet before interacting with the robot and then recorded their opinions again after the interaction. Regarding the latter, the children responded to the question, “Please share your opinion about today’s class. Do you feel that you were able to deepen or broaden your thinking through the discussion activity that included the robot?” by evaluating on a four-point scale from 1 to 4, with options ranging from Strongly Disagree to Strongly Agree. Additionally, to assess impressions of the robot, a questionnaire survey was conducted on anthropomorphism, likability, and perceived intelligence, as measured by Godspeed [53].
4 Results
This section presents the experimental results obtained using the aforementioned method. Specifically, the following sections explain the participant information, objective and subjective evaluations of broadening or deepening perspective, impressions of the robots, and dialogue data.
4.1 Participants
Among the children who attended the class, those who completed both the comment sheet and questionnaire were included in the analysis. As a result, 25 students (10 boys and 15 girls, \(mean = 11.240\) years, \(SD = 0.427\)) were included in the control condition, and 28 students (13 boys and 15 girls, \(mean = 11.321\) years, \(SD = 0.467\)) were included in the proposed condition.
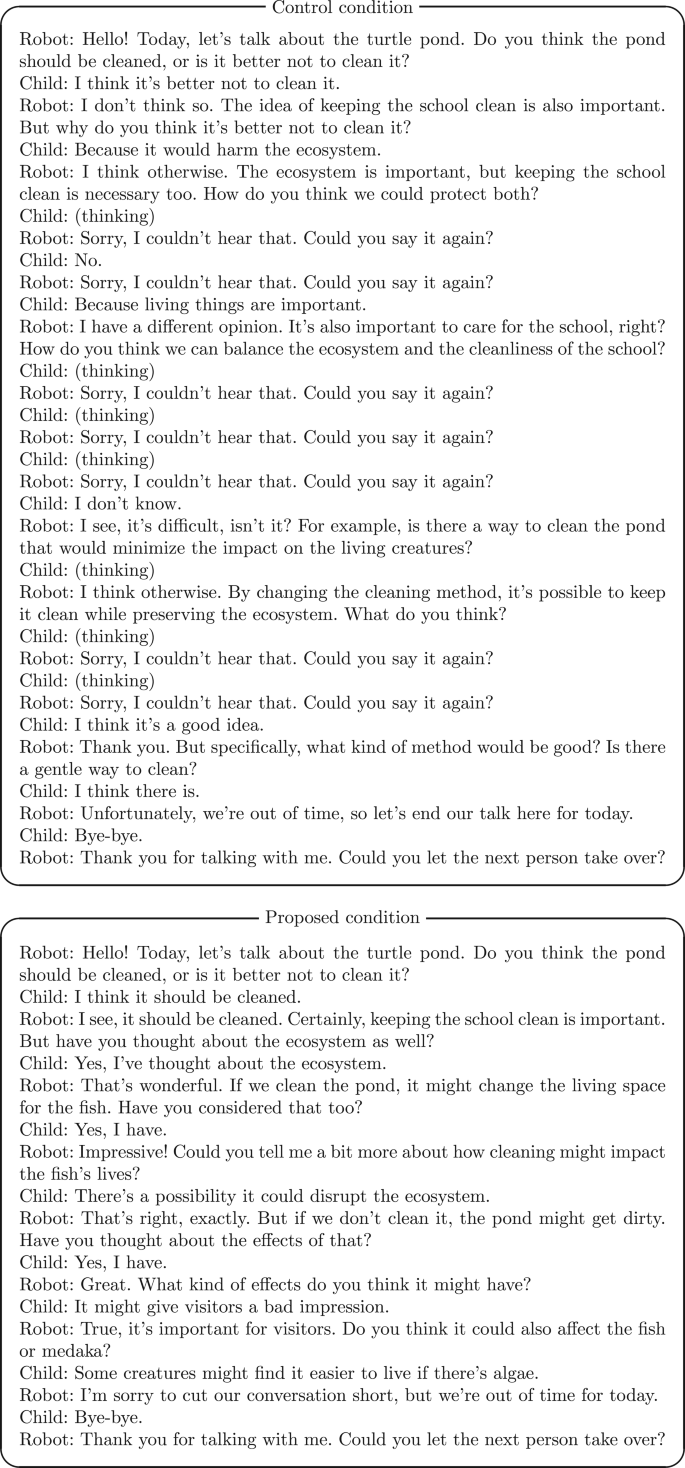
4.2 Dialogue Data
The following are dialogue examples of both the control and proposed conditions. These were selected from the first dialogue of one of the robots.
The co-occurrence network of words of the children is shown in Fig. 3, illustrating the types of dialogue that were conducted under the conditions of the proposal and control. This analysis was performed using KH Coder [[54](/article/10.1007/s12369-025-01331-5#ref-CR54 "Higuchi K (2016) A two-step approach to quantitative content analysis: KH coder tutorial using Anne of Green Gables (part I). Ritsumeikan Soc Sci Rev 52(3):77–91. https://doi.org/10.34382/00003706
")\]. The words are accompanied by their English translations near the Japanese words.Fig. 3
Co-occurrence network of words of children (“Ex” in the square indicates the proposed condition and “Cont” indicates the control condition)
4.3 Objective Evaluation of Broadening or Deepening Perspective
The contents of the reaction papers that the children completed before and after the discussions were used. Third persons annotated the text information of the reaction papers to verify whether the perspectives of the children had broadened or deepened after the discussion. Two non-authors (a male and a female, \(mean = 25.000\) years, \(SD = 1.000\)) annotated the reaction papers. They were asked to determine whether the children’s perspectives had “broadened or deepened” after the discussions, with options to respond either “Yes, I think so” or “No, I do not think so.” Initially, the two annotators independently annotated the reaction papers. When their annotations differed, they discussed the cases to reach an agreement. The agreement with the annotations was achieved, as indicated by a kappa coefficient (\(\kappa = .885\)).
We used the agreed annotation results for the analysis. Figure 4 shows the results for the number of Yes/No annotations. A condition \(\times\) annotation \(\chi^2\)-test revealed that there was a significant effect (\(\chi^2(1)=4.137,p =.042\)). A residual analysis indicated that the adjusted residual of the No annotation was \(2.000\), and the Yes annotation was \(-2.000\) in the control condition. It also indicated that the adjusted residual of the No annotation was \(-2.000\), and the Yes annotation was \(2.000\) in the proposed condition. These results suggest that the number of the No annotation was significantly larger (\(p < . 050\)) and the Yes annotation was smaller (\(p < .050\)) in the control condition, while the No was smaller (\(p < .050\)) and the Yes was larger (\(p < .050\)) in the proposed condition. This result suggests that the proposed condition broadens or deepens the perspective of children more than the control condition and supports our hypothesis objectively.
Fig. 4
Result of objective evaluation of broadening or deepening perspective based on reaction paper annotation
4.4 Subjective Evaluation of Broadening or Deepening Perspective
Furthermore, a Mann-Whitney U test was conducted with the conditions as an independent variable and the children’s subjective evaluation of broadening or deepening perspective as a dependent variable. Figure 5 shows the result of the subjective evaluation of the broadening or deepening perspective. The result revealed a significant difference between the control and proposed conditions (\(U = 247.000, p = .049\)). This result suggests that the proposed condition promotes the perceived broadening or deepening of children’s perspectives more than the control condition and subjectively supports our hypothesis.
Fig. 5
Result of subjective evaluation of broadening or deepening perspective (\(*: p < .050\))
4.5 Robot Impression
To evaluate the robots’ impressions, the three indices (anthropomorphism, likeability, and perceived intelligence) were adopted from the Godspeed questionnaire [53]. Figure 6 shows the results. Mann-Whitney U tests revealed significant differences between the control and proposed conditions in the three indexes: Anthropomorphism (\(U = 174.500, p = .002\)), Likeability (\(U = 194.500, p = .005\)), and Perceived Intelligence (\(U = 169.500, p = .001\)), respectively. These results suggest that the proposed condition improves the impressions of the robot.
Fig. 6
Result of anthropomorphism, likeability, and perceived intelligence (\(**: p < .010\))
4.6 Relationship Between Conditions and Evaluation Items
The analysis up to this point involved a comparison between conditions. Furthermore, to examine how the robot impression evaluation variables (anthropomorphism, likeability, and perceived intelligence) affect the subjective and objective evaluations of broadening or deepening perspective, we conducted structural equation modeling (SEM). The conditions were set as dummy variables: control condition = 0 and proposed condition = 1. The results of the analysis are presented in Fig. 7. The model fit indices were as follows: \(\chi^2(3)=4.184\) (\(n.s.\)), \(CFI = .989\), \(GFI = .974\), \(AGFI = .819\), and \(RMSEA = .087\). Significant positive effects were observed from the condition on anthropomorphism (\(\beta = .449, p < .001\)), likeability (\(\beta = .446, p < .001\)), and perceived intelligence (\(\beta = .478, p < .001\)). This indicates that the proposed condition leads to higher evaluations of anthropomorphism, likeability, and perceived intelligence. Furthermore, a significant positive effect from likeability on the subjective evaluation of broadening or deepening perspective (\(\beta = .593, p < .001\)) and a significant tendency of positive effect on the objective evaluation (\(\beta = .365, p = .074\)) were observed. These results indicate that, through the medium of likeability, the subjective evaluation of broadening or deepening perspective is enhanced, and also the objective evaluation might be improved.
Fig. 7
Result of structural equation modeling (\(+: p < .100, ***: p < .001\))
5 Discussion
This study hypothesized that robots that affirm children’s opinions while presenting new perspectives can further broaden or deepen their viewpoints. The experimental results in the primary school confirmed that the proposed approach promoted broadening or deepening the perspectives of children, supporting our hypothesis. The proposed method also enhanced the impression of the robot (anthropomorphism, likeability, and perceived intelligence). Furthermore, we found that, through the medium of likeability, the subjective evaluation of broadening or deepening perspective is enhanced, and also the objective evaluation might be improved. This study not only proposed a method for broadening or deepening the perspectives of children but also clarified the factors contributing to it. This study provides valuable insights into the design of dialogue robots that can broaden or deepen the perspectives of children.
The proposed method contributes not only to broadening or deepening the perspectives of children but also to improving the impression of the robot. The increase in likeability of the affirming robot aligns with previous research on empathic robots or AI in creating positive impressions [[26](/article/10.1007/s12369-025-01331-5#ref-CR26 "Uchida T, Minato T, Ishiguro H (2016) A values-based dialogue strategy to build motivation for conversation with autonomous conversational robots. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp 206–211). https://doi.org/10.1109/ROMAN.2016.7745112
"), [55](#ref-CR55 "Zhou L, Gao J, Li D, Shum H-Y (2020) The design and implementation of xiaoice, an empathetic social chatbot. Comput Linguist 46(1):53–93"),[56](#ref-CR56 "Liu K, Picard RW (2005) Embedded empathy in continuous, interactive health assessment. In CHI Workshop on HCI Challenges in Health Assessment, vol 1. pp 3"),[57](/article/10.1007/s12369-025-01331-5#ref-CR57 "McTear MF, Callejas Z, Griol D (2016) The conversational interface. Springer")\]. However, it is intriguing that this method also enhances the perception of anthropomorphism and perceived intelligence. Additionally, this study revealed that, through the medium of likeability, the subjective evaluation of broadening or deepening perspective is enhanced, and also the objective evaluation might be improved. Since there may be other influencing factors, further exploration with a broader range of elements is required to comprehensively identify these factors. To evaluate the broadening or deepening perspective, this study employed both objective evaluation by third-party assessors and subjective evaluation by the children themselves. Future research could systematize the evaluation methods by clarifying various influencing factors.Since this study aimed to examine whether there was the effect of broadening or deepening of perspective, we adopted the Yes/No binary categories in the objective evaluation. Furthermore, as there is few previous research on the more categories involved in this effect, if we were to use them, we would need to create the categories subjectively, and there remain concerns about their validity. Additionally, if we were to increase the number of categories, there are concerns that the agreement rate would decrease, and it might become difficult to conduct an objective evaluation. In fact, in previous research, there is a method of dividing into two categories such as positive and negative [58]. Therefore, as a first step, this research was conducted in the binary categories. Further research on annotation methods could help to sophisticate the evaluation methods.
In developing affirming robots, nonverbal information (such as facial expressions and gestures) is also considered important in their expressions. Numerous studies have focused on nonverbal expressions [59,60,61]. Investigating not only verbal expressions but also the impact of nonverbal expressions on broadening or deepening the perspectives of children might enable the design of more multimodal dialogue robots. Additionally, since nonverbal expressions depend on the specifications of the robot, it is necessary to conduct validations using various types of robots.
We discuss applying the proposed method to humans instead of robots. If similar dialogues can be reproduced, results similar to those of this study would be obtained. However, since the ease of speaking to robots or humans might vary among children, this factor should be considered in future verification.
In the experiment, mainly one representative of the children discussed with the robot while the others listened to the dialogue. It is notable that not only the children interacting with the robots but also the children listening to the dialogue could broaden or deepen their perspectives. Designing and evaluating systems that consider the dialogue format might enable us to study more effective methodologies.
This study was conducted among sixth-grade primary school students in Japan. Cross-sectional validation is needed to determine whether the proposed method is effective across different nationalities and age groups. Thus, it is necessary to adjust knowledge levels according to age group. Children’s perception that they broadened or deepened perspective might also be related to metacognition. Future research would benefit from examining this aspect while considering individual differences. Furthermore, realizing adaptive dialogues tailored to individual characteristics might lead to the development of more sophisticated dialogue robots. The experiment used the topic “Living Organisms and the Environment” in a science class. Future research should investigate whether the proposed method is effective for other topics in science or other subjects.
This experiment was conducted during the actual classes. Since there was a possibility that other children could hear the robot’s voice, it was difficult to establish two conditions within a single class. Therefore, we assigned different conditions to each class. This setting might raise the potential influence of class-specific effects, which is a limitation of the experiment.
Data Availability
The data analyzed for this study can be shared if you contact the corresponding authors by e-mail.
References
- Rieckmann M (2017) Education for sustainable development goals: learning objectives. UNESCO publishing
Google Scholar - UNESCO. (2020) Education for sustainable development: a roadmap
- Chi MT, Wylie R (2014) The ICAP framework: linking cognitive engagement to active learning outcomes. Educ Psychologist 49(4):219–243
Article Google Scholar - Webb NM (2009) The teacher’s role in promoting collaborative dialogue in the classroom. Br J Educ Psychol 79(1):1–28
Article Google Scholar - Cheng F-F, Wu C-S, Su P-C (2021) The impact of collaborative learning and personality on satisfaction in innovative teaching context. Front Phychol 12:713497
Article Google Scholar - Auerbach JE, Concordel A, Kornatowski PM, Floreano D (2019) Inquiry-based learning with RoboGen: an open-source software and hardware platform for robotics and artificial intelligence. IEEE Trans Learn Technol 12(3):356–369. https://doi.org/10.1109/TLT.2018.2833111
Article Google Scholar - Chen H, Park HW, Breazeal C (2020) Teaching and learning with children: impact of reciprocal peer learning with a social robot on children’s learning and emotive engagement. Comput Educ 150:103836. https://doi.org/10.1016/j.compedu.2020.103836
Article Google Scholar - Chen B, Hwang G-H, Wang S-H (2021). Accessed 2024-11-12 Gender differences in cognitive load when applying game-based learning with intelligent robots. Educ Technol Soc 24(3):102–115. https://www.jstor.org/stable/27032859
Google Scholar - Fournier-Viger P, Nkambou R, Nguifo EM, Mayers A, Faghihi U. (2013) A multiparadigm intelligent tutoring system for robotic arm training. IEEE Trans Learn Technol 6(4):364–377. https://doi.org/10.1109/TLT.2013.27
Article Google Scholar - Fridin M (2014) Storytelling by a kindergarten social assistive robot: a tool for constructive learning in preschool education. Comput Educ 70:53–64. https://doi.org/10.1016/j.compedu.2013.07.043
Article Google Scholar - Kerimbayev N, Beisov N, Kovtun A, Nurym N, Akramova A (2020) Robotics in the international educational space: integration and the experience. Educ Inf Technol 25:5835–5851
Article Google Scholar - Sarika Kewalramani GK, Palaiologou I (2021) Using Artificial Intelligence (AI)-interfaced robotic toys in early childhood settings: a case for children’s inquiry literacy. Eur Early Chidhood Educ Res J 29(5):652–668. https://doi.org/10.1080/1350293X.2021.1968458
Article Google Scholar - Lee S, Noh H, Lee J, Lee K, Lee GG, Sagong S, Kim M (2011) On the effectiveness of robot-assisted language learning. ReCALL 23(1):25–58. https://doi.org/10.1017/S0958344010000273
Article Google Scholar - Martínez-Tenor AC-M, Fernández-Madrigal J-A (2019) Teaching machine learning in robotics interactively: the case of reinforcement learning with Lego® Mindstorms. Interact Learn Env 27(3):293–306. https://doi.org/10.1080/10494820.2018.1525411
Article Google Scholar - Mitnik R, Nussbaum M, Recabarren M (2009) Developing cognition with collaborative robotic activities. Br J Educ Technol Soc 12(4):317–330. Accessed 2024-11-12
Google Scholar - Mitnik R, Recabarren M, Nussbaum M, Soto A (2009) Collaborative robotic instruction: a graph teaching experience. Comput Educ 53(2):330–342. https://doi.org/10.1016/j.compedu.2009.02.010
Article Google Scholar - Salas-Pilco SZ (2020) The impact of AI and robotics on physical, social-emotional and intellectual learning outcomes: an integrated analytical framework. Br J Educ Technol 51(5):1808–1825. https://doi.org/10.1111/bjet.12984. https://berajournals.onlinelibrary.wiley.com/doi/pdf/10.1111/bjet.12984
Article Google Scholar - Belpaeme T, Tanaka F (2021) Social robots as educators. In: OECD digital education outlook 2021 pushing the frontiers with artificial intelligence, blockchain and robots. p 143
Google Scholar - Chu S-T, Hwang G-J, Tu Y-F (2022) Artificial intelligence-based robots in education: a systematic review of selected SSCI publications. Comput Educ: Artif Intel 3:100091
Google Scholar - Al Hakim VG, Yang S-H, Liyanawatta M, Wang J-H, Chen G-D (2022) Robots in situated learning classrooms with immediate feedback mechanisms to improve students’ learning performance. Comput Educ 182:104483
Article Google Scholar - Benvenuti M, Cangelosi A, Weinberger A, Mazzoni E, Benassi M, Barbaresi M, Orsoni M (2023) Artificial intelligence and human behavioral development: a perspective on new skills and competences acquisition for the educational context. Comput Hum Behav 148:107903
Article Google Scholar - Ruiz-Rojas LI, Salvador-Ullauri L, Acosta-Vargas P (2024) Collaborative working and critical thinking: adoption of generative artificial intelligence tools in higher education. Sustainability 16(13):5367
Article Google Scholar - Willingham DT (2019) How to teach critical thinking. Educ: Future Front 1:1–17
Google Scholar - Trilling B, Fadel C (2009) 21st century skills: learning for life in our times. John Wiley & Sons
Google Scholar - Facione PA (2011) Critical thinking: what it is and why it counts. Insight Assess 1(1):1–23
Google Scholar - Uchida T, Minato T, Ishiguro H (2016) A values-based dialogue strategy to build motivation for conversation with autonomous conversational robots. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp 206–211). https://doi.org/10.1109/ROMAN.2016.7745112
- Tanaka F, Matsuzoe S (2012) Children teach a care-receiving robot to promote their learning: field experiments in a classroom for vocabulary learning. J Educ Chang Hum Rob Interact 1(1):78–95
Article Google Scholar - Kanda T, Hirano T, Eaton D, Ishiguro H (2004) Interactive robots as social partners and peer tutors for children: a field trial. Hum–Comput Interact 19(1–2):61–84
Article Google Scholar - Komatsubara T, Shiomi M, Kanda T, Ishiguro H, Hagita N (2014) Can a social robot help children’s understanding of science in classrooms? In Proceedings of the second international conference on Human-agent Interaction, pp 83–90
- Köse H, Uluer P, Akalín N, Yorgancí R, Özkul A, Ince G (2015) The effect of embodiment in sign language tutoring with assistive humanoid robots. Int J Soc Robot 7:537–548
Article Google Scholar - Jones A, Castellano G (2018) Adaptive robotic tutors that support self-regulated learning: a longer-term investigation with primary school children. Int J Soc Robot 10:357–370
Article Google Scholar - Prihar E, Lee M, Hopman M, Kalai AT, Vempala S, Wang A, Wickline G, Murray A, Heffernan N (2023) Comparing different approaches to generating mathematics explanations using large language models. In International Conference on Artificial Intelligence in Education, Springer, pp. 290–295
- Pardos ZA, Bhandari S (2023) Learning gain differences between ChatGPT and human tutor generated algebra hints. arXiv preprint arXiv:2302.06871
- Balse R, Kumar V, Prasad P, Warriem JM (2023) Evaluating the quality of LLM-Generated explanations for logical errors in CS1 student programs. In Proceedings of the 16th Annual ACM India Compute Conference, pp 49–54
- Rooein D, Curry AC, Hovy D (2023) Know your audience: do LLMs adapt to different age and education levels? arXiv preprint arXiv:2312.02065
- Kawata M, Maeda M, Yoshikawa Y, Kumazaki H, Kamide H, Baba J, Matsuura N, Ishiguro H (2022) Preliminary investigation of the acceptance of a teleoperated interactive robot participating in a classroom by 5th grade students. In International Conference on Social Robotics, Springer, pp. 194–203
- Salvi F, Ribeiro MH, Gallotti R, West R (2024) On the conversational persuasiveness of large language models: a randomized controlled trial. arXiv preprint arXiv:2403.14380
- Costello TH, Pennycook G, Rand DG (2024) Durably reducing conspiracy beliefs through dialogues with AI. Science 385(6714):1814
Article Google Scholar - Homma T, Takahashi H, Ban M, Shimaya J, Fukushima H, Moriya J (2024) Development and evaluation of the dialogue protocol aimed at improving critical thinking through online dialogue with a robot. Trans Hum Interface Soc 26(1):149–158. https://doi.org/10.11184/his.26.1_149
Article Google Scholar - Tolksdorf NF, Wildt E, Rohlfing KJ (2024) Preschoolers’ interactions with social robots: investigating the potential for eliciting metatalk and critical technological thinking. In Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pp 1053–1057
- Lupetti ML, Van Mechelen M (2022) Promoting children’s critical thinking towards robotics through robot deception. In 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), IEEE, pp. 588–597
- Arens AK, Jansen M, Preckel F, Schmidt I, Brunner M (2021) The structure of academic self-concept: a methodological review and empirical illustration of central models. Rev Educ Res 91(1):34–72
Article Google Scholar - Jeffs C, Nelson N, Grant KA, Nowell L, Paris B, Viceer N (2023) Feedback for teaching development: moving from a fixed to growth mindset. Prof Devel Educ 49(5):842–855
Google Scholar - Cutumisu M (2019) The association between feedback-seeking and performance is moderated by growth mindset in a digital assessment game. Comput Hum Behav 93:267–278
Article Google Scholar - Zhang J, Kuusisto E, Nokelainen P, Tirri K (2020) Peer feedback reflects the mindset and academic motivation of learners. Front Phychol 11:1701
Article Google Scholar - Elder JJ, Davis TH, Hughes B.L. (2023) A fluid self-concept: how the brain maintains coherence and positivity across an interconnected self-concept while incorporating social feedback. J Neurosci 43(22):4110–4128
Article Google Scholar - McPartlan P, Umarji O, Eccles JS (2021) Selective importance in self-enhancement: patterns of feedback adolescents use to improve math self-concept. J Early Adolesc 41(2):253–281
Article Google Scholar - Hewitt JP (2020) 22 the social construction of self-esteem. Oxford Handb Posit Phychol 309
- CommU. https://www.vstone.co.jp/products/commu/index.html
- Aitalk Corporation. (2012) https://www.ai-j.jp/about/
- Hello gpt-4o. (2024) https://openai.com/index/hello-gpt-4o/
- Web Speech API. (2020) https://wicg.github.io/speech-api/#use_cases
- Bartneck C, Kulić D, Croft E, Zoghbi S (2009) Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int J Soc Robot 1:71–81
Article Google Scholar - Higuchi K (2016) A two-step approach to quantitative content analysis: KH coder tutorial using Anne of Green Gables (part I). Ritsumeikan Soc Sci Rev 52(3):77–91. https://doi.org/10.34382/00003706
Article Google Scholar - Zhou L, Gao J, Li D, Shum H-Y (2020) The design and implementation of xiaoice, an empathetic social chatbot. Comput Linguist 46(1):53–93
Article Google Scholar - Liu K, Picard RW (2005) Embedded empathy in continuous, interactive health assessment. In CHI Workshop on HCI Challenges in Health Assessment, vol 1. pp 3
- McTear MF, Callejas Z, Griol D (2016) The conversational interface. Springer
Book Google Scholar - Pang B, Lee L et al. (2008) Opinion mining and sentiment analysis. Found Trends® Inf Retr 2(1–2):1–135
Article Google Scholar - Pütten AM, Krämer NC, Herrmann J (2018) The effects of humanlike and robot-specific affective nonverbal behavior on perception, emotion, and behavior. Int J Soc Robot 10:569–582
Article Google Scholar - Sato W, Namba S, Yang D, Nishida S, Ishi C, Minato T (2022) An android for emotional interaction: spatiotemporal validation of its facial expressions. Front Phychol 12:800657
Article Google Scholar - Ishi CT, Machiyashiki D, Mikata R, Ishiguro H. (2018) A speech-driven hand gesture generation method and evaluation in android robots. IEEE Robot Autom Lett 3(4):3757–3764
Article Google Scholar
Funding
This work was supported by JSPS KAKENHI Grant Numbers 22K17949, 24H00165, and 24K06473 as well as JST PRESTO Grant Number JPMJPR23I2 and MiraiProgram Grant Number JPMJMI22J3.
Author information
Authors and Affiliations
- Graduate School of Engineering Science, Osaka University, 1-3 Machikaneyamacho, Toyonaka, Osaka, 560-8531, Japan
Takahisa Uchida, Midori Ban, Akimoto Koshino, Kazuki Sakai, Hiroshi Ishiguro & Yuichiro Yoshikawa - Faculty of Education, Mie University Affiliated Primary School, 359 Kanonji, Tsu, Mie, 514-0062, Japan
Masashi Maeda - Faculty of Education, Mie University, 1577 Kurimamachiyacho, Tsu, Mie, 514-8507, Japan
Naomi Matsuura
Authors
- Takahisa Uchida
- Midori Ban
- Akimoto Koshino
- Masashi Maeda
- Kazuki Sakai
- Naomi Matsuura
- Hiroshi Ishiguro
- Yuichiro Yoshikawa
Contributions
All authors contributed to the study conception and design. Materials were prepared by T.U., M.B., A.K., M.M., and K.K. Data collection was performed by T.U., M.B., A.K., M.M., and Y.Y. Analysis was conducted by T.U. and M.B. All authors approved the final manuscript.
Corresponding author
Correspondence toTakahisa Uchida.
Ethics declarations
Ethics Approval
The study was approved by the Mie University Affiliated Primary School Research Promotion Committee.
Consent to Participate
The authors took informed consent from all the participants.
Consent for Publication
The participants signed informed consent regarding publishing their data.
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article
Cite this article
Uchida, T., Ban, M., Koshino, A. et al. Affirmative Large Language Model-Based Dialogue Robots for Broadening or Deepening the Perspective of Children.Int J of Soc Robotics 17, 2729–2741 (2025). https://doi.org/10.1007/s12369-025-01331-5
- Received: 18 November 2024
- Revised: 31 July 2025
- Accepted: 25 September 2025
- Published: 28 November 2025
- Version of record: 28 November 2025
- Issue date: November 2025
- DOI: https://doi.org/10.1007/s12369-025-01331-5