JRM Vol.26 p.660 (2014) | Fuji Technology Press: academic journal publisher (original) (raw)
Top > JRM > Satellite, Planetary or Terrestrial Subsurface Explorer Ro ...
single-rb.php
JRM Vol.26 No.5 pp. 660-661
(2014)
Development Report:
Views over last 60 days: 1,147
Satellite, Planetary or Terrestrial Subsurface Explorer Robot Based on Earthworm Locomotion
*Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
**Japan Aerospace Exploration Agency, 3-1-1 Yoshinodai, Chuo-ku, Sagamihara-shi, Kanagawa 252-5210, Japan
Received:
October 30, 2013
Accepted:
August 6, 2014
Published:
October 20, 2014

Keywords:
investigation of satellites and planets underground, excavation robot, peristaltic crawling, earthworm
Abstract
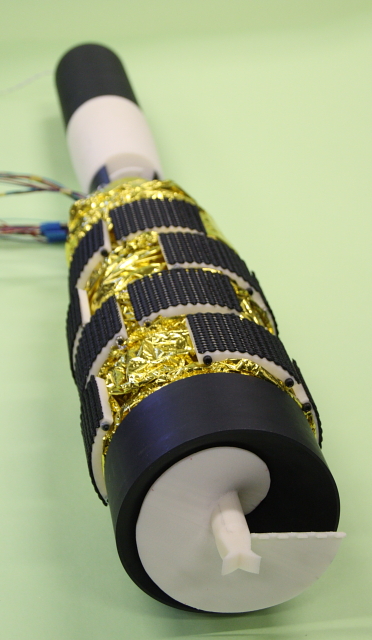
Subsurface explorer robot
We have developed a small, unmanned explorer robot to investigate the undergrounds of satellites and planets. This paper describes the developed excavation robot, which is based on earthworm locomotion. The robot demonstrates excavation activity at 1/6 of its own weight, mimicking the light gravity conditions of the Moon. We conclude that the robot is suitable for future excavation missions.
Cite this article as:
H. Omori, H. Kitamoto, A. Mizushina, T. Nakamura, and T. Kubota, “Satellite, Planetary or Terrestrial Subsurface Explorer Robot Based on Earthworm Locomotion,” J. Robot. Mechatron., Vol.26 No.5, pp. 660-661, 2014.
Data files:
References
- [1] K. Iizuka et al., “Development of a Small, Lightweight Rover with Elastic Wheels for Lunar Exploration,” J. Robot. Mechatron., Vol.24, No.6, pp. 1031-1039, 2012.
- [2] H. Omori et al., “Development of a Novel Bio-Inspired Planetary Subsurface Explorer: Initial Experimental Study by Prototype Excavator With Propulsion and Excavation Units,” IEEE Trans. Mechatron., Vol.18, No.2, pp. 459-470, 2013.
- [3] H. Kitamoto et al., “Propulsion Mechanism for a Lunar Subterranean Excavator Using Peristaltic Crawling,” J. Robot. Mechatron., Vol.25, No.3, pp. 466-475, 2013.
- [4] A. Mizushina et al., “A discharging mechanism for a lunar subsurface explorer with the peristaltic crawling mechanism,” in Proc. 6th Int. Conf. Rec. Adv. Space Technol., Istanbul, Turkey, pp. 955-960, 2013,
*This site is desgined based on HTML5 and CSS3 for modern browsers, e.g. Chrome, Firefox, Safari, Edge, Opera.
Last updated on Apr. 10, 2026