OmniXtreme: Breaking the Generality Barrier in High-Dynamic Humanoid Control (original) (raw)
Behavior Montage
Behavior Montage
Behavior Gallery
Unified policy control across diverse extreme behaviors.
B-boying with a rapid-fire string of back handsprings.
Skip back, pivot through a hand-to-headstand, drop, flip, and bounce back.
Long breaking dance.
Another long breaking dance.
Five consecutive webster flip.
Alternating pistol squats.
Back handspring, cartwheels, aerial cartwheel, bicycle kick flips.
Spinkicks, butterfly kicks.
Forward roll, backward roll, crawl forward.
Thomas flare, backspin, crawl forward and backflip.
More
Supplementary demos generated by a unified policy.
Attack combos.
Handstand walk.
Another attack combos.
Knocked out.
Push-ups.
Roll-flip combos.
Method
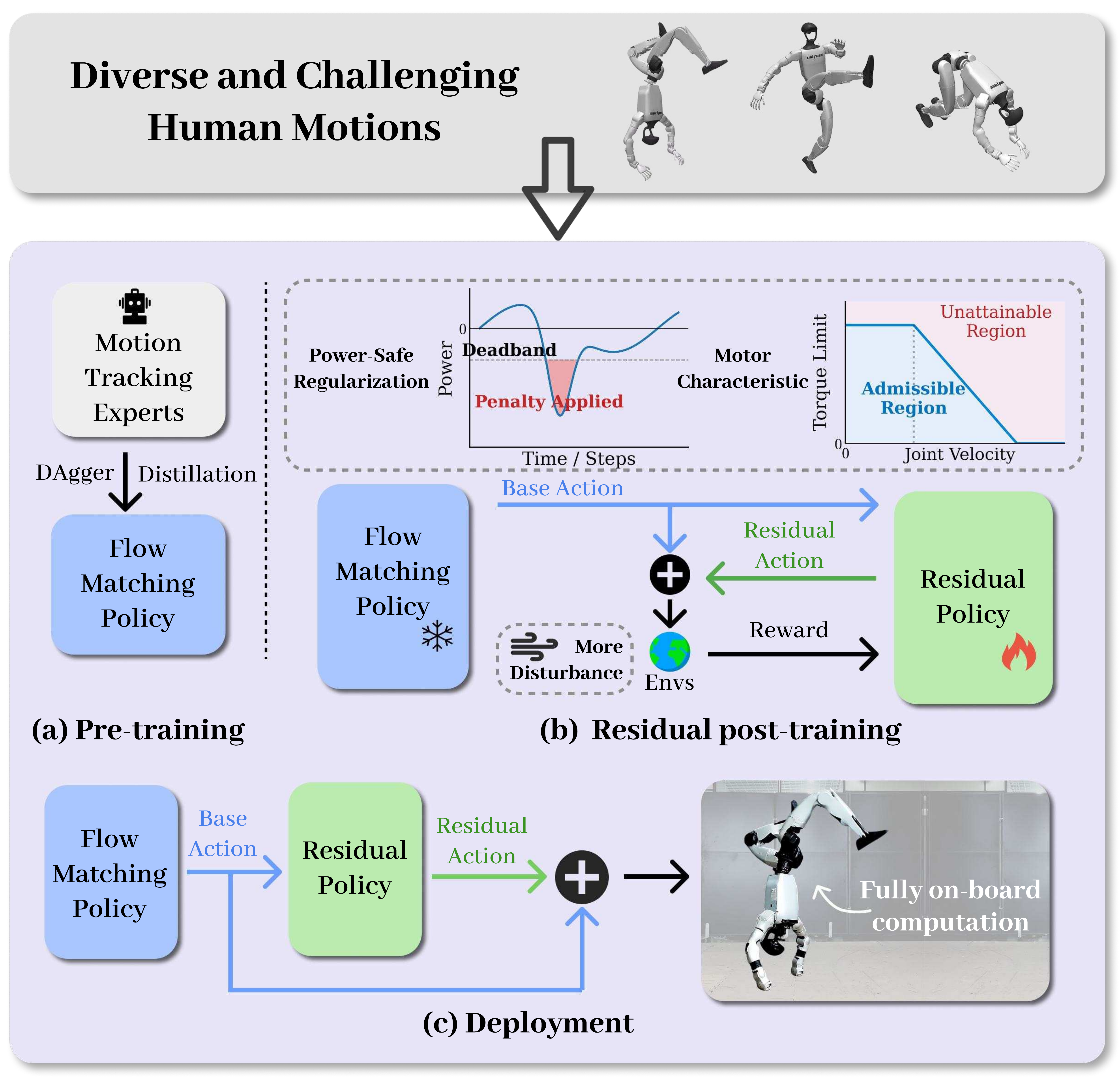
Pre-training
A unified base policy is trained via DAgger-based Flow Matching to aggregate diverse motion priors from different motion tracking experts.
Post-training
The base policy is frozen while a residual policy is optimized under stringent motor constraints, extensive domain randomization, and power-safety regularization to bridge the sim-to-real gap.
Deployment
The whole inference pipeline is real- time and executed entirely onboard, facilitating robust and agile control in physical environments.
Ablation Study
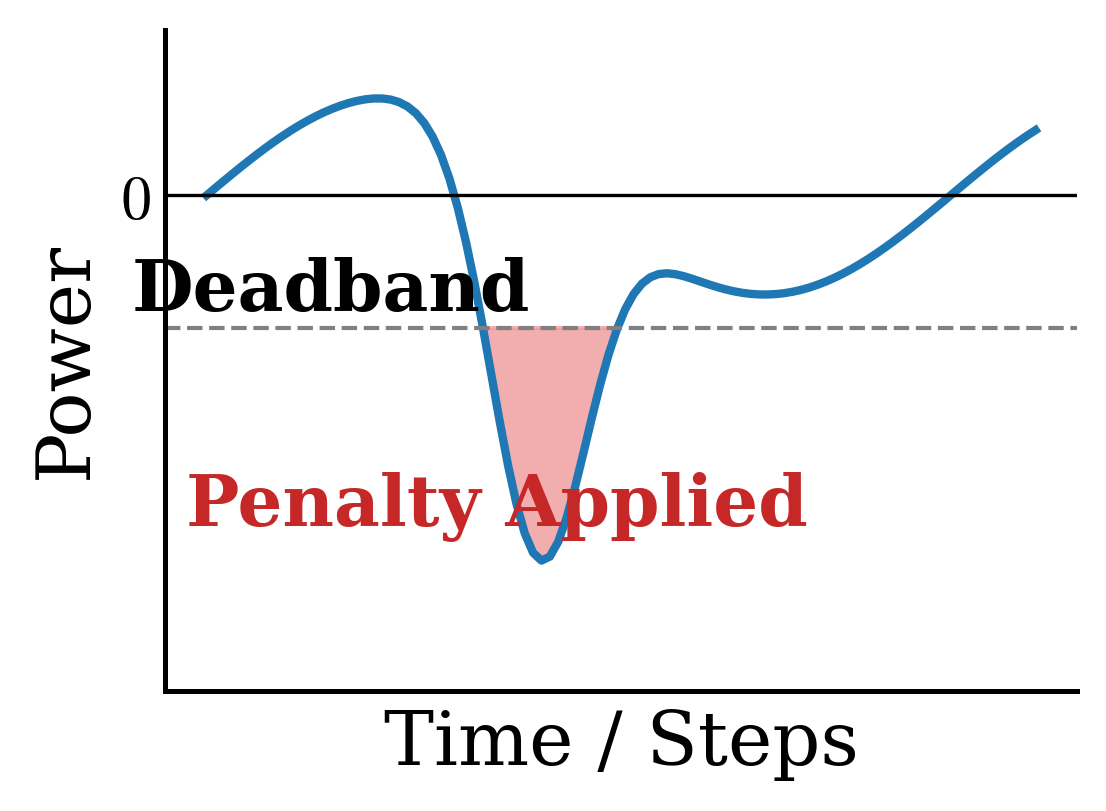
Power-Safety Regularization explicitly penalizes excessive negative joint power to prevent unsafe energy absorption and transient braking loads during high-dynamic motions.
Citation
Use this arXiv BibTeX entry for reference.
@article{wang2026omnixtreme, title={OmniXtreme: Breaking the Generality Barrier in High-Dynamic Humanoid Control}, author={Yunshen Wang and Shaohang Zhu and Peiyuan Zhi and Yuhan Li and Jiaxin Li and Yong-Lu Li and Yuchen Xiao and Xingxing Wang and Baoxiong Jia and Siyuan Huang}, journal={arXiv preprint arXiv:2602.23843}, year={2026}, url={https://arxiv.org/abs/2602.23843} }