François Bailly (original) (raw)
François Bailly
I am a research scientist at INRIA inside the Camin team. I work on human motion analysis using advanced robotics and numerical optimization tools, with neuroprostheses control as main target application.
Bio: From 2019 to 2021, I was a postdoc at Université de Montréal, working with Mickael Begon on biomechanical motion optimization. In 2018, I obtained my PhD in the Gepetto team at LAAS-CNRS supervised by Philippe Souères and Bruno Watier. In 2015, I graduated from École Normale Supérieure Paris-Saclay in Computer Science and Applied Mathematics.
On-going projects: In 2025, I started an associated team with Université de Montréal. In 2023, I have been awarded an ANR JCJC grant for the B-IRD project, on fast and reliable biomechanical methods dedicated to assistive technologies. Since 2023 I am part of the european EIC Pathfinder AI-HAND project led by INRIA on implanted neuroprosthese for hand movement restoration.
For any inquiries, feel free to reach out to me via mail!
CV Mail Scholar Github LinkedIn

Publications
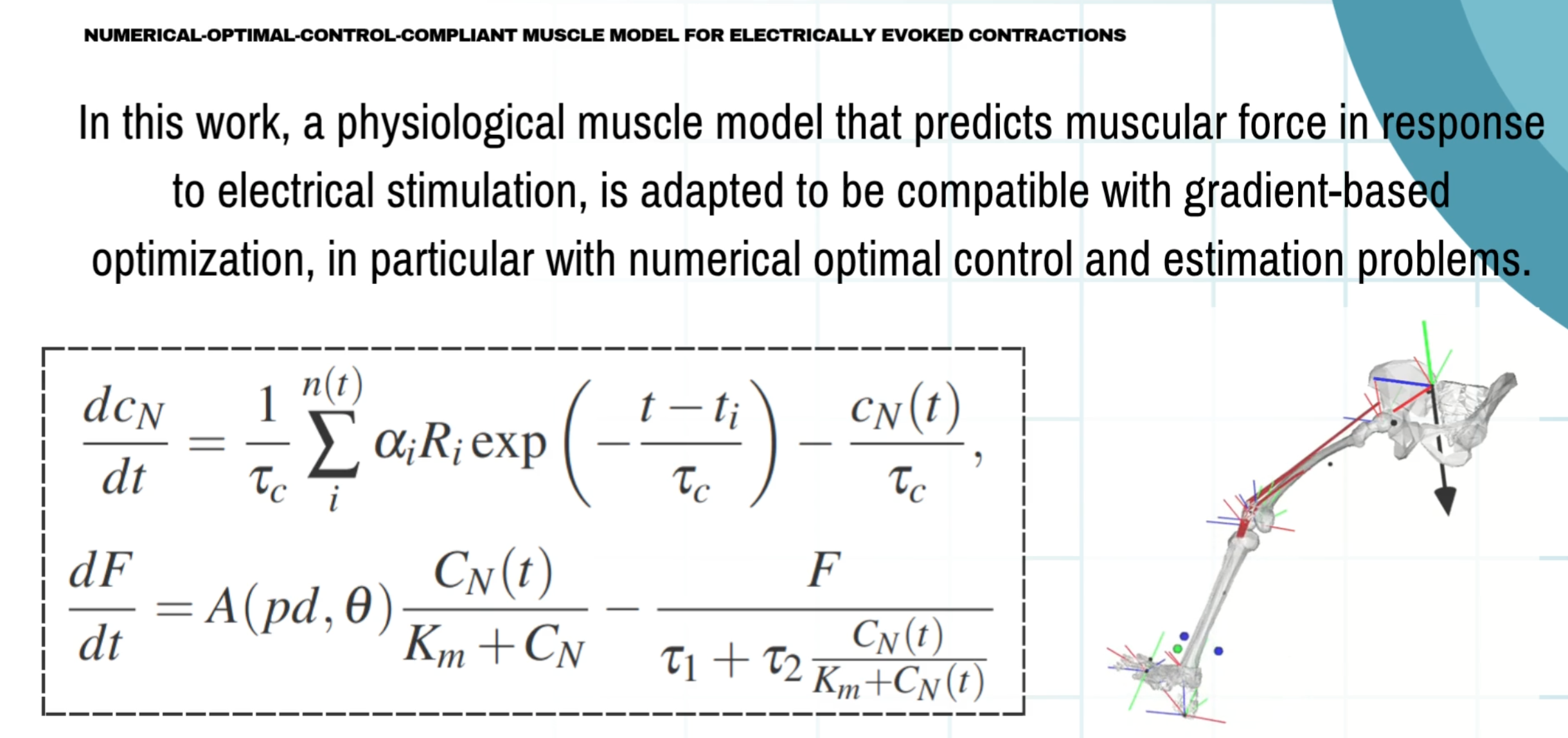
Numerical-Optimal-Control-Compliant Muscle Model for Electrically Evoked Contractions
Tiago Coelho-Magalhaes, Christine Azevedo-Coste, François Bailly
IEEE Transactions on Medical Robotics and Bionics, 2025
Project Page / Paper /
@InProceedings{coelho2025numerical,
author = {Tiago Coelho-Magalhaes and Christine Azevedo-Coste and François Bailly},
title = {Numerical-Optimal-Control-Compliant Muscle Model for Electrically Evoked Contractions},
journal = {IEEE Transactions on Medical Robotics and Bionics},
year = {2025},
}
I-GRIP, a Grasping Movement Intention Estimator for Intuitive Control of Assistive Devices
Etienne Moullet, Justin Carpentier, Christine Azevedo-Coste, François Bailly
2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), 2024
Project Page / Paper /
@InProceedings{moullet2024grip,
author = {Etienne Moullet and Justin Carpentier and Christine Azevedo-Coste and François Bailly},
title = {I-GRIP, a Grasping Movement Intention Estimator for Intuitive Control of Assistive Devices},
booktitle = {2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids)},
year = {2024},
}
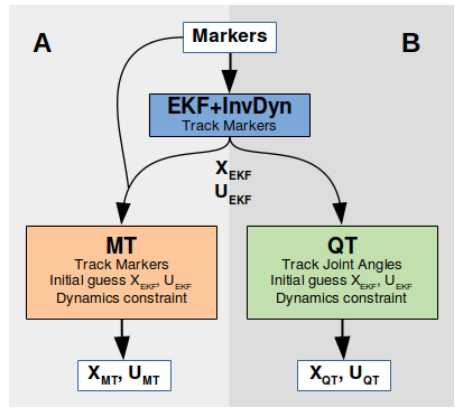
Optimal estimation of complex aerial movements using dynamic optimisation
André Venne, François Bailly, Eve Charbonneau, Jennifer Dowling-Medley, Mickael Begon
Sports biomechanics, 2023
Project Page / Paper /
@InProceedings{venne2023optimal,
author = {André Venne and François Bailly and Eve Charbonneau and Jennifer Dowling-Medley and Mickael Begon},
title = {Optimal estimation of complex aerial movements using dynamic optimisation},
journal = {Sports biomechanics},
year = {2023},
}
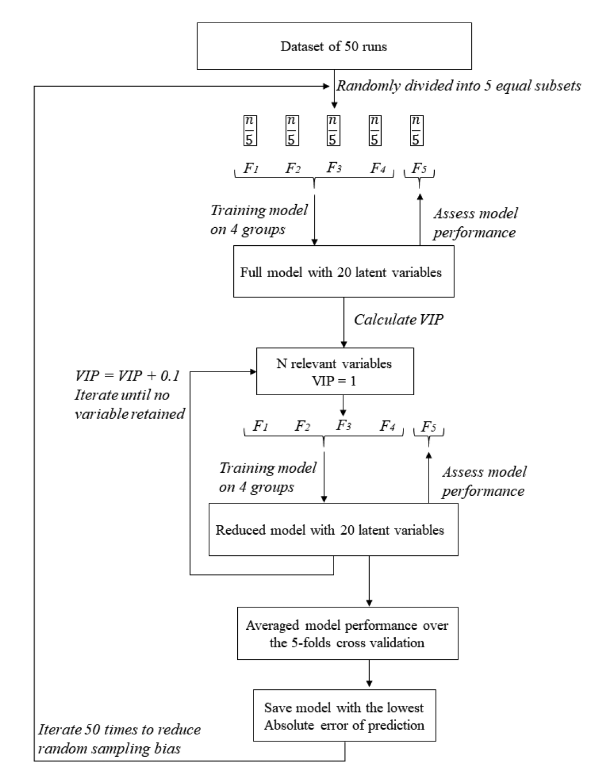
Inertial Measurement Units and Partial Least Square Regression to Predict Perceived Exertion during Repetitive Fatiguing Piano Tasks
Etienne Goubault, Felipe Verdugo, François Bailly, Mickael Begon, Fabien Dal Maso
IEEE Transactions on Human-Machine Systems, 2023
Project Page /
@InProceedings{goubault2023inertial,
author = {Etienne Goubault and Felipe Verdugo and François Bailly and Mickael Begon and Fabien Dal Maso},
title = {Inertial Measurement Units and Partial Least Square Regression to Predict Perceived Exertion during Repetitive Fatiguing Piano Tasks},
journal = {IEEE Transactions on Human-Machine Systems},
year = {2023},
}
Moving Horizon Estimation of Human Kinematics and Muscle Forces
Amedeo Ceglia, Francois Bailly, Mickael Begon
IEEE Robotics and Automation Letters, 2023
Project Page / Paper /
@InProceedings{ceglia2023moving,
author = {Amedeo Ceglia and Francois Bailly and Mickael Begon},
title = {Moving Horizon Estimation of Human Kinematics and Muscle Forces},
journal = {IEEE Robotics and Automation Letters},
year = {2023},
}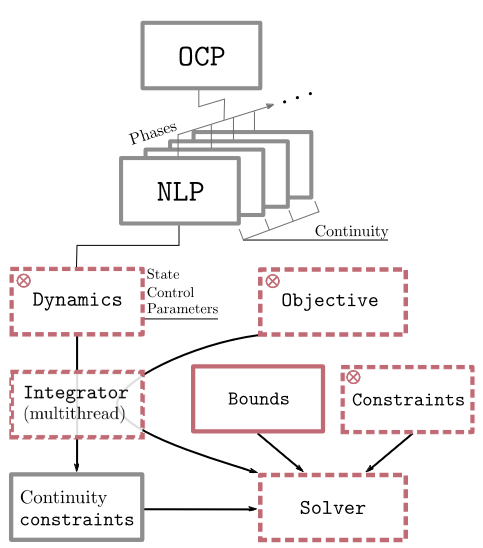
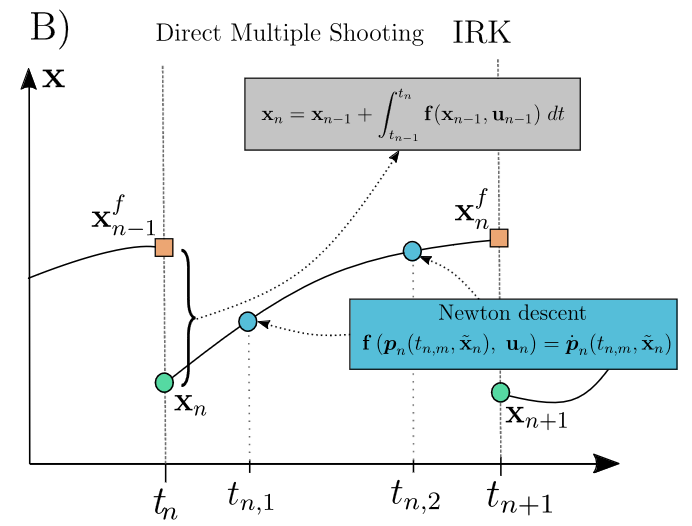
Bioptim, a python framework for musculoskeletal optimal control in biomechanics
Benjamin Michaud, François Bailly, Eve Charbonneau, Amedeo Ceglia, Léa Sanchez, Mickael Begon
IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022
Project Page / Paper /
@InProceedings{michaud2022bioptim,
author = {Benjamin Michaud and François Bailly and Eve Charbonneau and Amedeo Ceglia and Léa Sanchez and Mickael Begon},
title = {Bioptim, a python framework for musculoskeletal optimal control in biomechanics},
journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems},
year = {2022},
}
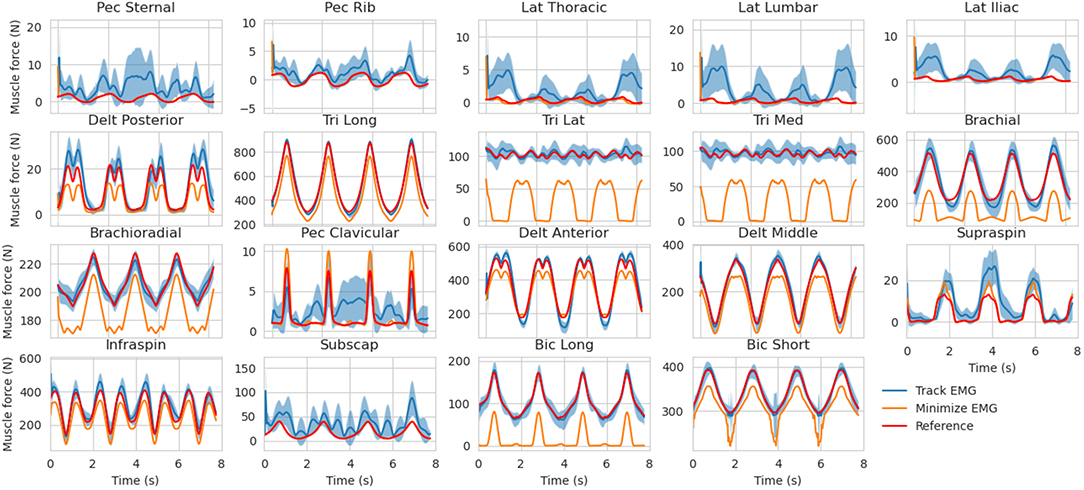
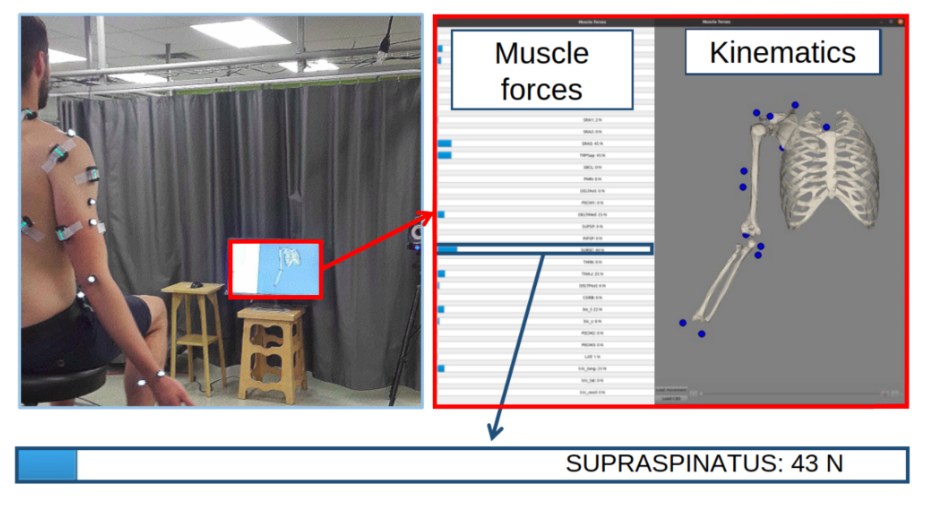
Real-time and dynamically consistent estimation of muscle forces using a moving horizon emg-marker tracking algorithm—application to upper limb biomechanics
François Bailly, Amedeo Ceglia, Benjamin Michaud, Dominique Rouleau, Mickael Begon
Frontiers in bioengineering and biotechnology, 2021
Project Page /
@InProceedings{bailly2021real,
author = {François Bailly and Amedeo Ceglia and Benjamin Michaud and Dominique Rouleau and Mickael Begon},
title = {Real-time and dynamically consistent estimation of muscle forces using a moving horizon emg-marker tracking algorithm—application to upper limb biomechanics},
journal = {Frontiers in bioengineering and biotechnology},
year = {2021},
}
Optimal estimation of the centroidal dynamics of legged robots
François Bailly, Justin Carpentier, Philippe Sou{\`e}res
2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Project Page / Paper /
@InProceedings{bailly2021optimalICRA,
author = {François Bailly and Justin Carpentier and Philippe Sou{\`e}res},
title = {Optimal estimation of the centroidal dynamics of legged robots},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2021},
}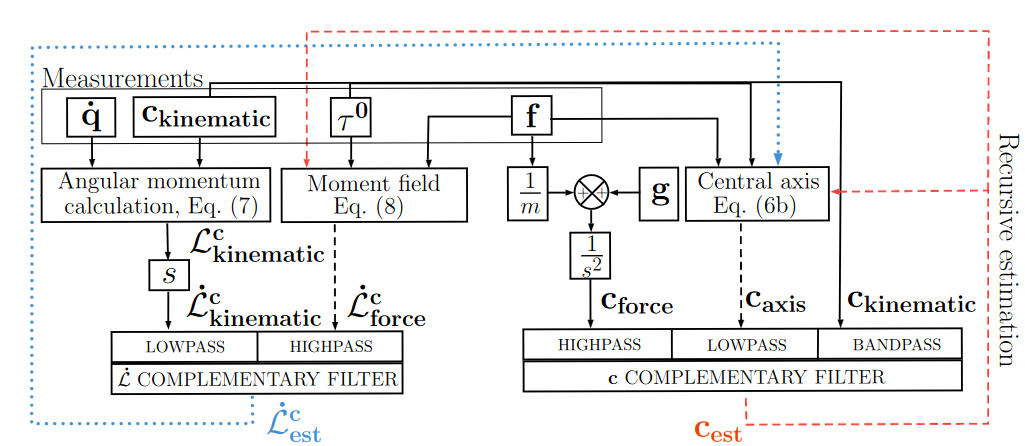
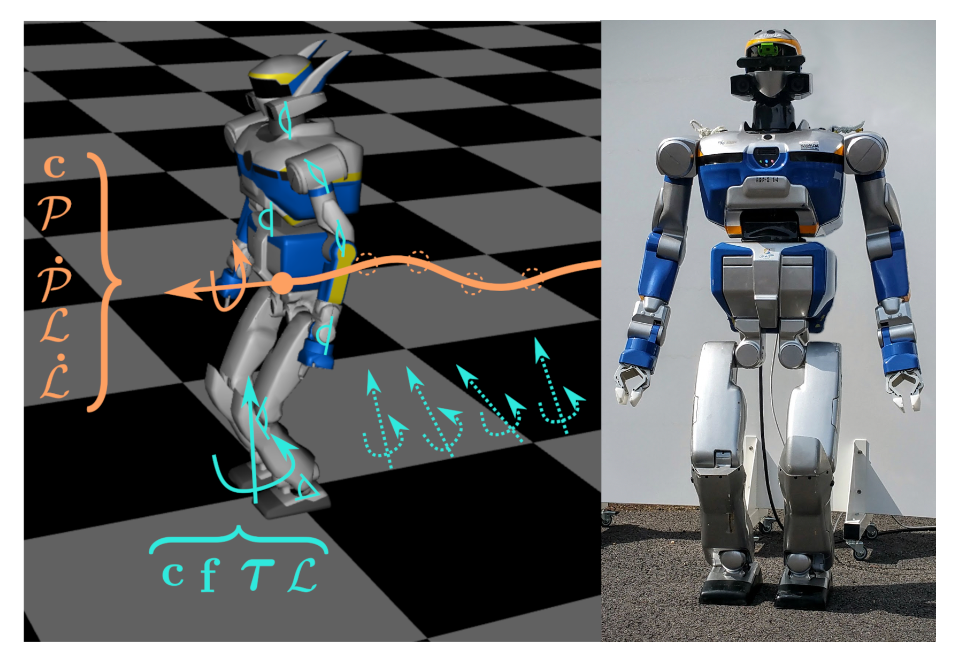
Recursive Filtering of Kinetic and Kinematic Data for Center of Mass and Angular Momentum Derivative Estimation
François Bailly, Justin Carpentier, Bruno Watier, Philippe Sou{\`e}res
Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering: Selected Papers from the 16th International Symposium CMBBE and 4th Conference on Imaging and Visualization, August 14-16, 2019, New York City, USA, 2020
Project Page /
@InProceedings{bailly2020recursive,
author = {François Bailly and Justin Carpentier and Bruno Watier and Philippe Sou{\`e}res},
title = {Recursive Filtering of Kinetic and Kinematic Data for Center of Mass and Angular Momentum Derivative Estimation},
booktitle = {Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering: Selected Papers from the 16th International Symposium CMBBE and 4th Conference on Imaging and Visualization, August 14-16, 2019, New York City, USA},
year = {2020},
}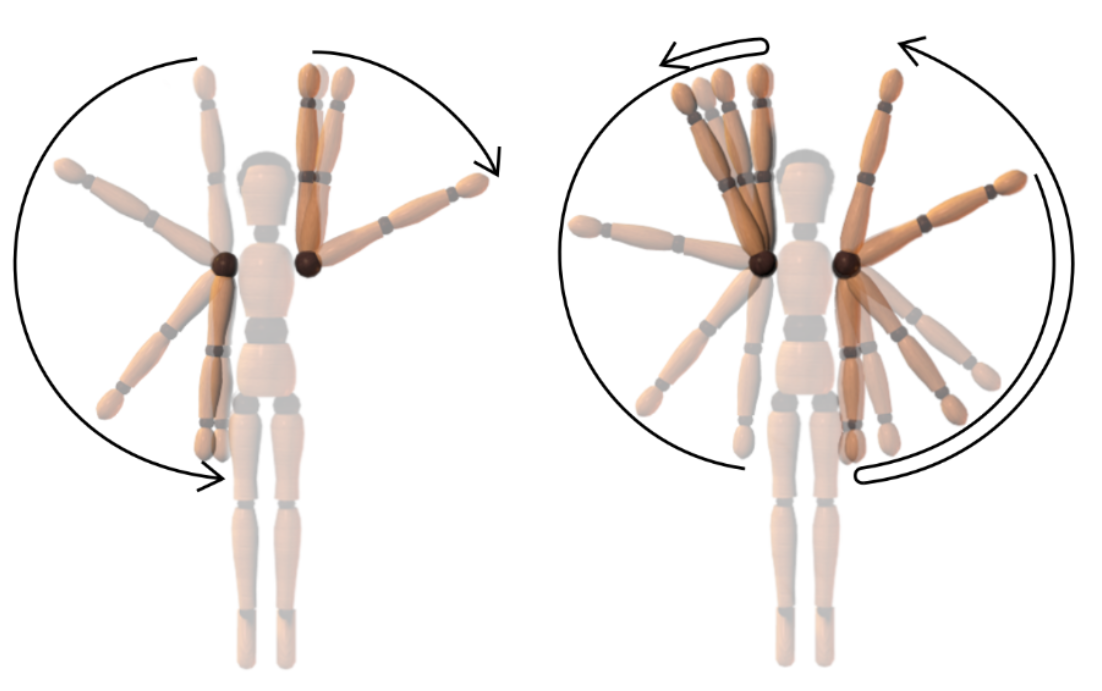
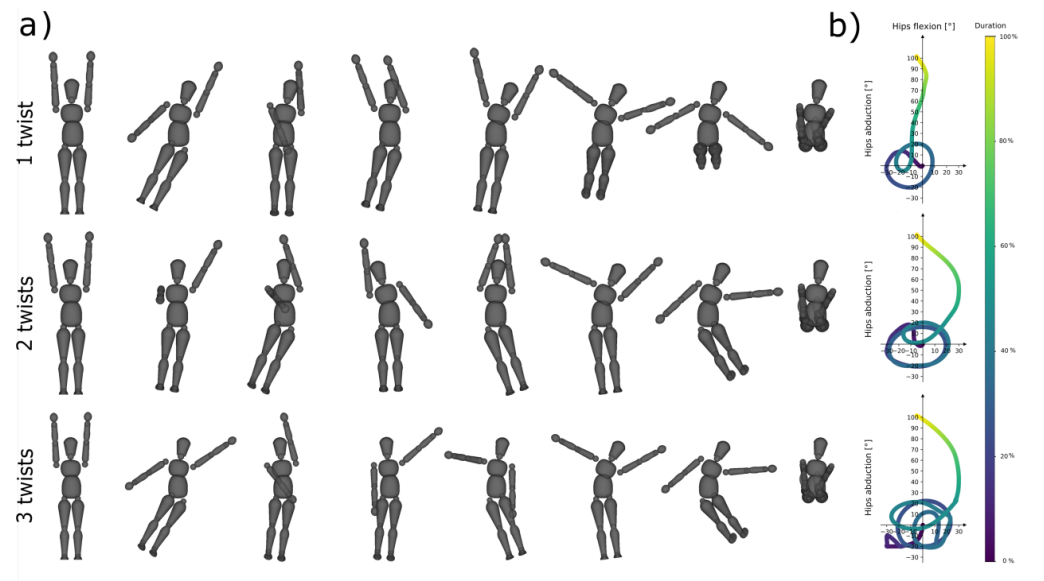
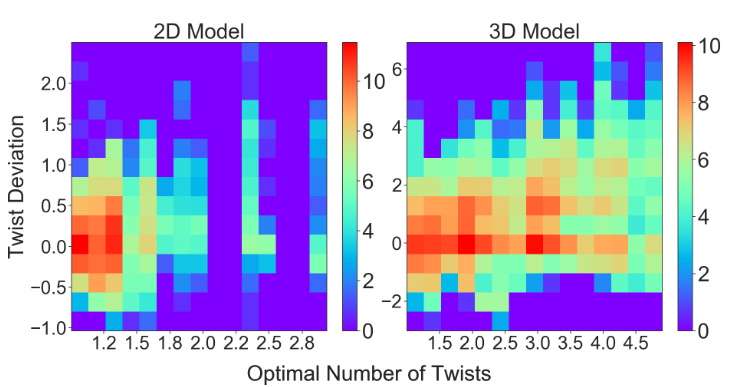
Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline
Eve Charbonneau, François Bailly, Loane Dan{\`e}s, Mickael Begon
Applied Sciences, 2020
Project Page /
@InProceedings{charbonneau2020optimal,
author = {Eve Charbonneau and François Bailly and Loane Dan{\`e}s and Mickael Begon},
title = {Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline},
journal = {Applied Sciences},
year = {2020},
}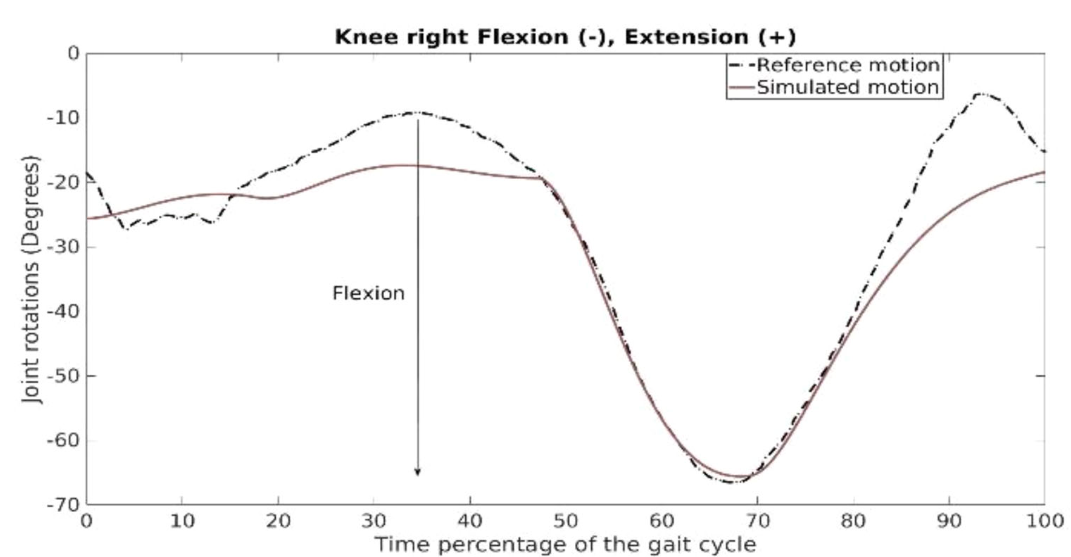
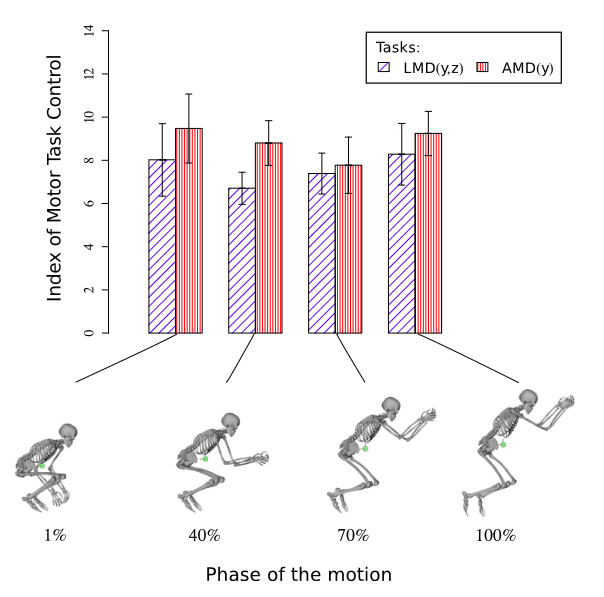
Human gait simulation from a reduced set of low-dimensional tasks using hierarchical control
Melya Boukheddimi, François Bailly, Philippe Sou{\`e}res, Bruno Watier
Computer Methods in Biomechanics and Biomedical Engineering, 2019
Project Page /
@InProceedings{boukheddimi2019human,
author = {Melya Boukheddimi and François Bailly and Philippe Sou{\`e}res and Bruno Watier},
title = {Human gait simulation from a reduced set of low-dimensional tasks using hierarchical control},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
year = {2019},
}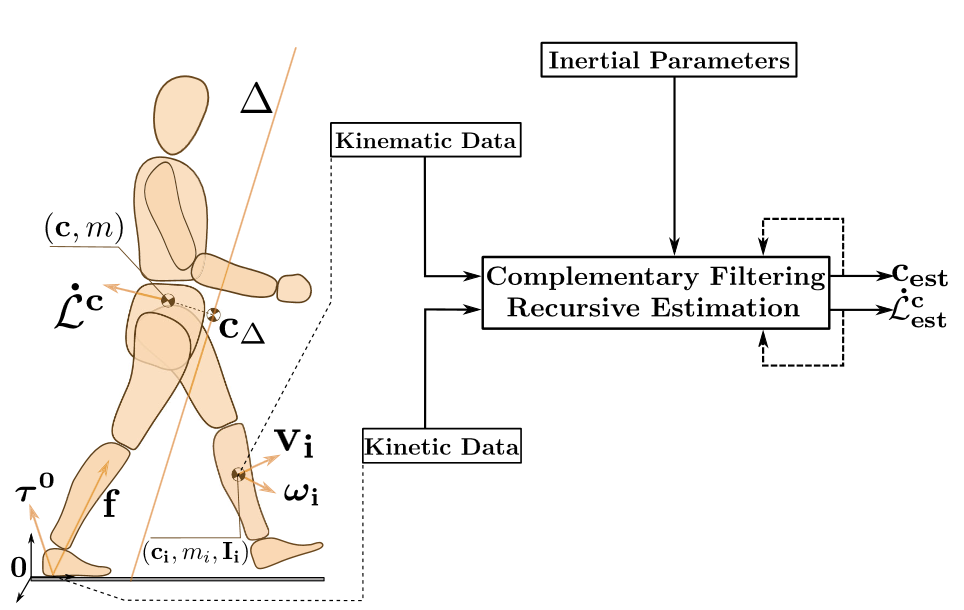
Estimating the center of mass and the angular momentum derivative for legged locomotion—a recursive approach
François Bailly, Justin Carpentier, Mehdi Benallegue, Bruno Watier, Philippe Sou{\`e}res
IEEE Robotics and Automation Letters, 2019
Project Page /
@InProceedings{bailly2019estimating,
author = {François Bailly and Justin Carpentier and Mehdi Benallegue and Bruno Watier and Philippe Sou{\`e}res},
title = {Estimating the center of mass and the angular momentum derivative for legged locomotion—a recursive approach},
journal = {IEEE Robotics and Automation Letters},
year = {2019},
}
Inverse dynamics study of the parkour kong-vault during take-off
G Maldonado, F Bailly, P Sou{\`e}res, B Watier
Computer Methods in Biomechanics and Biomedical Engineering, 2019
Project Page /
@InProceedings{maldonado2019inverse,
author = {G Maldonado and F Bailly and P Sou{\`e}res and B Watier},
title = {Inverse dynamics study of the parkour kong-vault during take-off},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
year = {2019},
}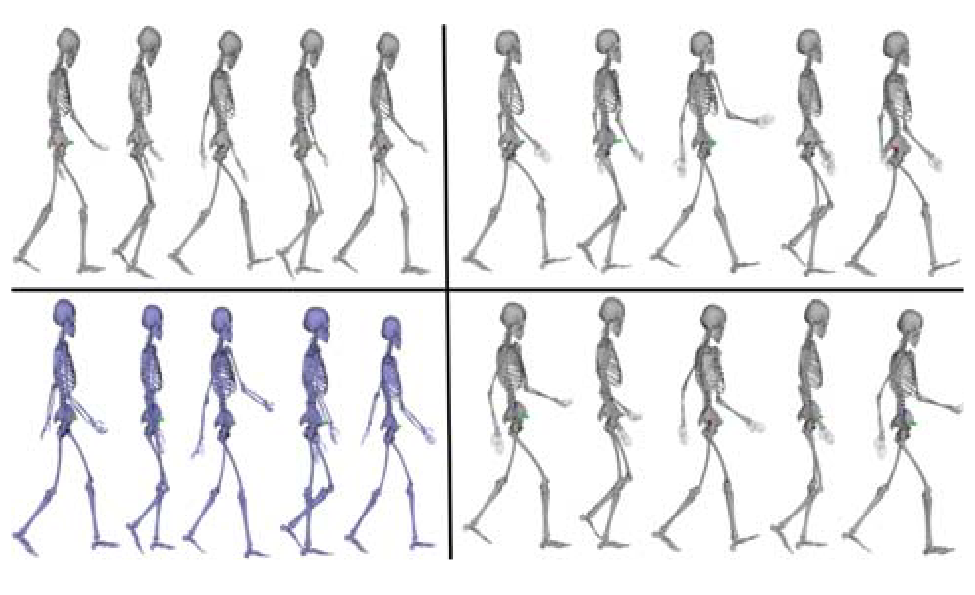
Human-like gait generation from a reduced set of tasks using the hierarchical control framework from robotics
Melya Boukheddimi, François Bailly, Philippe Sou{\`e}res, Bruno Watier
2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019
Project Page /
@InProceedings{boukheddimi2019human2,
author = {Melya Boukheddimi and François Bailly and Philippe Sou{\`e}res and Bruno Watier},
title = {Human-like gait generation from a reduced set of tasks using the hierarchical control framework from robotics},
booktitle = {2019 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
year = {2019},
}
Should mobile robots have a head ? -A rationale based on behavior, automatic control and signal processing-
François Bailly, Emmanuelle Pouydebat, Vincent Bels, Bruno Watier, Philippe Sou{\`e}res
7th Conference on Biomimetic and Biohybrid Systems, 2018
Project Page /
@InProceedings{bailly2018should,
author = {François Bailly and Emmanuelle Pouydebat and Vincent Bels and Bruno Watier and Philippe Sou{\`e}res},
title = {Should mobile robots have a head ? -A rationale based on behavior, automatic control and signal processing-},
booktitle = {7th Conference on Biomimetic and Biohybrid Systems},
year = {2018},
}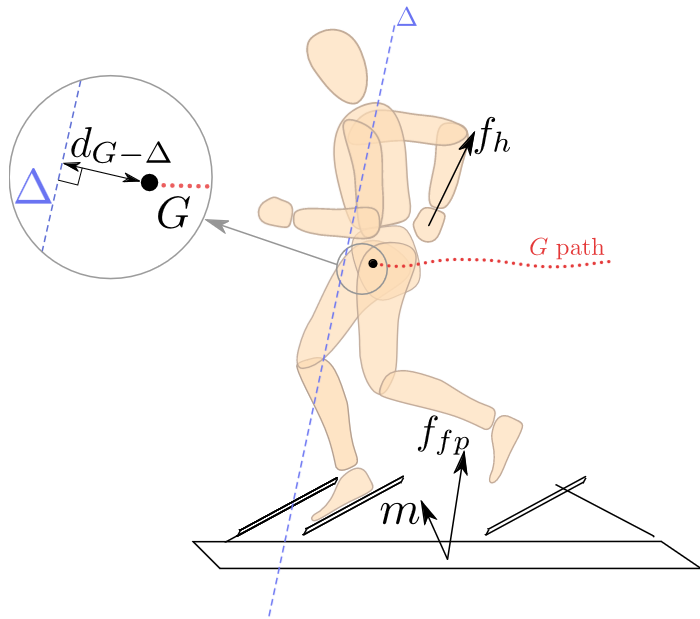
A mechanical descriptor of human locomotion and its application to multi-contact walking in humanoids
François Bailly, Justin Carpentier, Bertrand Pinet, Philippe Sou{\`e}res, Bruno Watier
7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2018
Project Page /
@InProceedings{bailly2018mechanical,
author = {François Bailly and Justin Carpentier and Bertrand Pinet and Philippe Sou{\`e}res and Bruno Watier},
title = {A mechanical descriptor of human locomotion and its application to multi-contact walking in humanoids},
booktitle = {7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob)},
year = {2018},
}


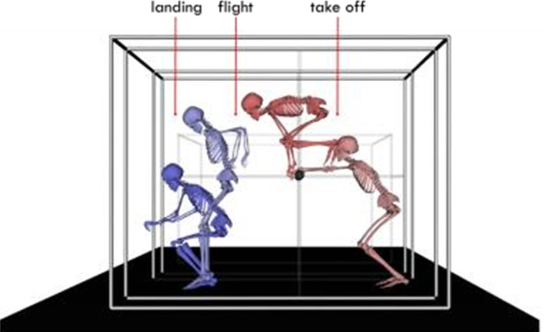
Angular momentum regulation strategies for highly dynamic landing in Parkour
Galo Maldonado, Francois Bailly, Philippe Soueres, Bruno Watier
Computer methods in biomechanics and biomedical engineering, 2017
Project Page /
@InProceedings{maldonado2017angular,
author = {Galo Maldonado and Francois Bailly and Philippe Soueres and Bruno Watier},
title = {Angular momentum regulation strategies for highly dynamic landing in Parkour},
journal = {Computer methods in biomechanics and biomedical engineering},
year = {2017},
}
On optimality of MIA for unknown leakage models and related new practical results
François Bailly, Sylvain Guilley, Annelie Heuser, Olivier Rioul
16th Workshop on Cryptographic Hardware and Embedded Systems (CHES 2014), 2014
Project Page /
@InProceedings{bailly2014optimality,
author = {François Bailly and Sylvain Guilley and Annelie Heuser and Olivier Rioul},
title = {On optimality of MIA for unknown leakage models and related new practical results},
booktitle = {16th Workshop on Cryptographic Hardware and Embedded Systems (CHES 2014)},
year = {2014},
}Talks

Invited talk at Journées Nationales de la Recherche en Robotique
JNRR Rennes 2025, France, 2025
Link

Invited talk at Rehabweek 2025, "Barriers and Facilitators in FES Cycling: Bridging Clinical Insights and Technological Advances"
Rehabweek Chicago 2025, USA, 2025
Link

Invited talk at Inria-Brasil Workshop on Digital Health
Hybrid workshop: online (remote) and face-to-face at UNICAMP, center BIOS, Campinas, São Paulo State, Brazil, 2025
Link

Invited talk at Journées Nationales de la Robotique Hunmanoïde
JNRH 2024 Nancy, France, 2024
Link
Invited workshop on Bioptim
CMBBE 2023 Paris, France, 2023

Polynomial regressions on muscle parameters can approximate the muscle/tendon equilibrium
47éme congres de la Société de Biomécanique 2022, Monastir, Tunisia, 2022
Workshop on Bioptim
CMBBE 2021 - Bonn, Germany, 2021
Optimal Estimation of the Centroidal Dynamics of Legged Robots
IEEE ICRA 2021 - Xi'an, China, 2021

Full-Body Dynamic Optimization of Complex Aerial Movements, with Gravitational Parameter Identification
21st Biennal Meeting of the Canadian Society for Biomechanics - Montréal, Canada, 2021
Optimal Control to Innovate in Aerial Twisting on Trampoline
21st Biennal Meeting of the Canadian Society for Biomechanics - Montréal, Canada, 2021

Estimating the center of mass and the angular momentum derivative for legged locomotion
IEEE IROS 2019 - Macau, China, 2019
Recursive Estimation of the Human Body's Center of Mass and Angular Momentum Derivative
CMBBE 16th International Symposium 2019 - New-York City, USA, 2019

Motion Analysis and State Estimation of Anthropomorphic Systems
PhD thesis defense - LAAS-CNRS, Toulouse, France, 2018

A mechanical descriptor of human locomotion and its application to multi-contact walking in humanoids
IEEE BIOROB 7th International Conference 2018 - University of Twente, The Netherlands, 2018

Should mobile robots have a head ?
Living Mahchines 2018 - Paris, France, 2018

Regulation of the distance between the center of mass and the minimum moment axis for stabilized locomotion in humans
JNRH 2017 - LIRMM Montpellier, France, 2017