Hermann Blum (original) (raw)



Hi, I'm Hermann, a junior professor at the Lamarr Institute / Uni Bonn. Previously, I worked as a PostDoc in the Computer Vision and Geometry Lab of ETH Zürich. For my PhD I was part of the Autonomous Systems Lab at ETH Zürich.
My research focuses on embodied perception. I strive to build models and methods to understand an agent's environment semantically and geometrically. Recently, I am most interested in interactions with the environment for applications such as robotic manipulation, video understanding, and mixed-reality.
Here is my lab website.
Loop Closure From Two Views: Revisiting PGO for Scalable Trajectory Estimation Through Monocular Priors
T Yi Lim, B Sun, M Pollefeys, H Blum
IEEE Robotics and Automation Letters 2026
FunFact: Building Probabilistic Functional 3D Scene Graphs via Factor-Graph Reasoning
Z Fu, R Zurbrügg, K Qu, M Pollefeys, M Hutter, H Blum, Z Bauer
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern …, 2026
Hoi!-A Multimodal Dataset for Force-Grounded, Cross-View Articulated Manipulation
T Engelbracht, R Zurbrügg, M Wohlrapp, M Büchner, A Valada, M Pollefeys, H Blum, Z Bauer

SNI-SLAM++: Tightly-Coupled Semantic Neural Implicit SLAM
S Zhu, G Wang, H Blum, Z Wang, G Zhang, D Cremers, M Pollefeys, H Wang
IEEE Transactions on Pattern Analysis and Machine Intelligence 2026
osmAG-LLM: Zero-Shot Open-Vocabulary Object Navigation via Semantic Maps and Large Language Models Reasoning
F Xie, S Schwertfeger, H Blum
IEEE Robotics and Automation Letters 2026
OpenFrontier: General Navigation with Visual-Language Grounded Frontiers
E Padilla, B Sun, M Pollefeys, H Blum
Articulated 3D Scene Graphs for Open-World Mobile Manipulation
M Büchner, A Röfer, T Engelbracht, T Welschehold, Z Bauer, H Blum, ...
Open-Vocabulary and Semantic-Aware Reasoning for Search and Retrieval of Objects in Dynamic and Concealed Spaces
R Menon, Y Schmiede, M Bennewitz, H Blum
Perception and Planning for Mobile Manipulation in Changing Environments …, 2025
3D-MOOD: Lifting 2D to 3D for Monocular Open-Set Object Detection
Y Yang, L Piccinelli, M Segu, S Li, R Huang, Y Fu, M Pollefeys, H Blum, Z Bauer
ActLoc: Learning to Localize on the Move via Active Viewpoint Selection
B Sun, L Di Giammarino, H Blum, M Pollefeys
FunGraph: Functionality Aware 3D Scene Graphs for Language-Prompted Scene Interaction
D Rotondi, F Scaparro, H Blum, K O. Arras
SpotLight: Robotic Scene Understanding through Interaction and Affordance Detection
T Engelbracht, R Zurbrügg, M Pollefeys, H Blum, Z Bauer
FrontierNet: Learning Visual Cues to Explore
B Sun, H Chen, S Leutenegger, C Cadena, M Pollefeys, H Blum
IEEE Robotics and Automation Letters 2025
CroCoDL: Cross-device Collaborative Dataset for Localization
H Blum, A Mercurio, J O’Reilly, T Engelbracht, M Dusmanu, M Pollefeys, Z Bauer
2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
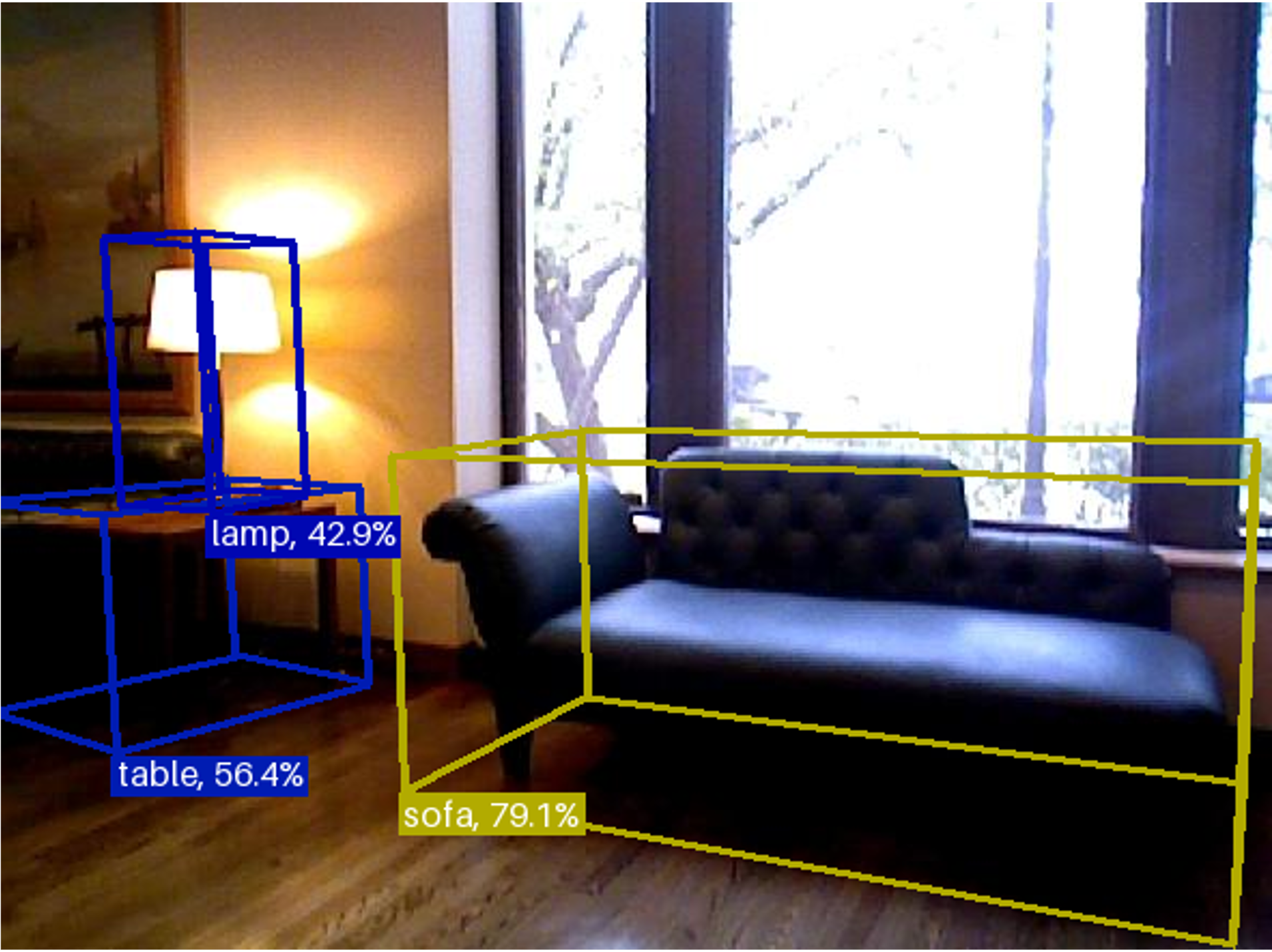
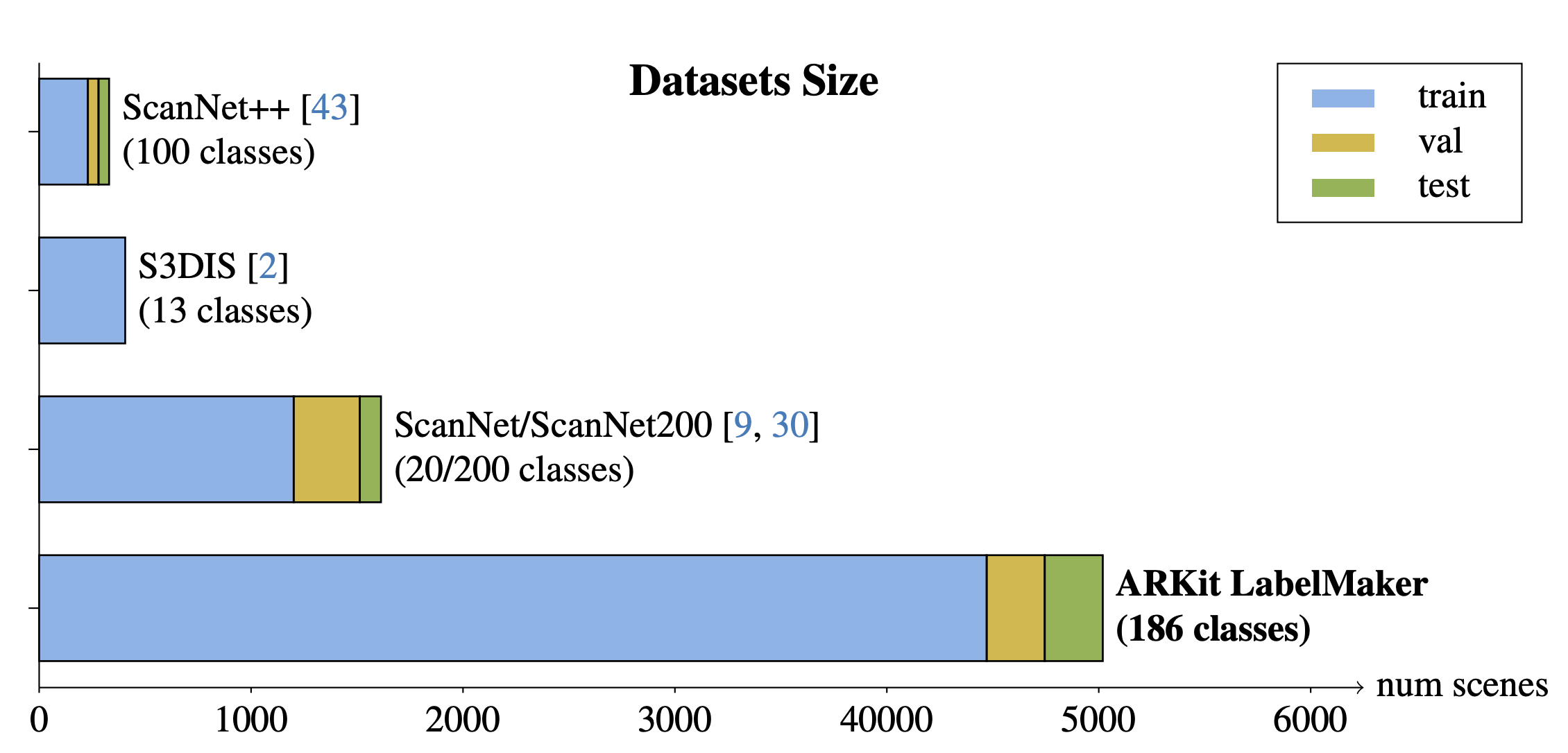
ARKit LabelMaker: A New Scale for Indoor 3D Scene Understanding
G Ji, S Weder, F Engelmann, M Pollefeys, H Blum
DepthSplat: Connecting Gaussian Splatting and Depth
H Xu, S Peng, F Wang, H Blum, D Barath, A Geiger, M Pollefeys

Spot-On: A Mixed Reality Interface for Multi-Robot Cooperation
T Engelbracht, P Lukovic, T Behrens, K Lascheit, R Zurbrügg, M Pollefeys, ...
Lost & Found: Tracking Changes from Egocentric Observations in 3D Dynamic Scene Graphs
T Behrens, R Zurbrügg, M Pollefeys, Z Bauer, H Blum
Robotics and Automation Letters (RA-L) 2025
HoloSpot: Intuitive Object Manipulation via Mixed Reality Drag-and-Drop
P Soler Garcia, P Lukovic, L Reynaud, A Sgobbi, F Bruni, M Brun, M Zünd, R Bollati, M Pollefeys, H Blum, Z Bauer
Learning Where to Look: Self-supervised Viewpoint Selection for Active Localization Using Geometrical Information
L Di Giammarino, B Sun, G Grisetti, M Pollefeys, H Blum, D Barath
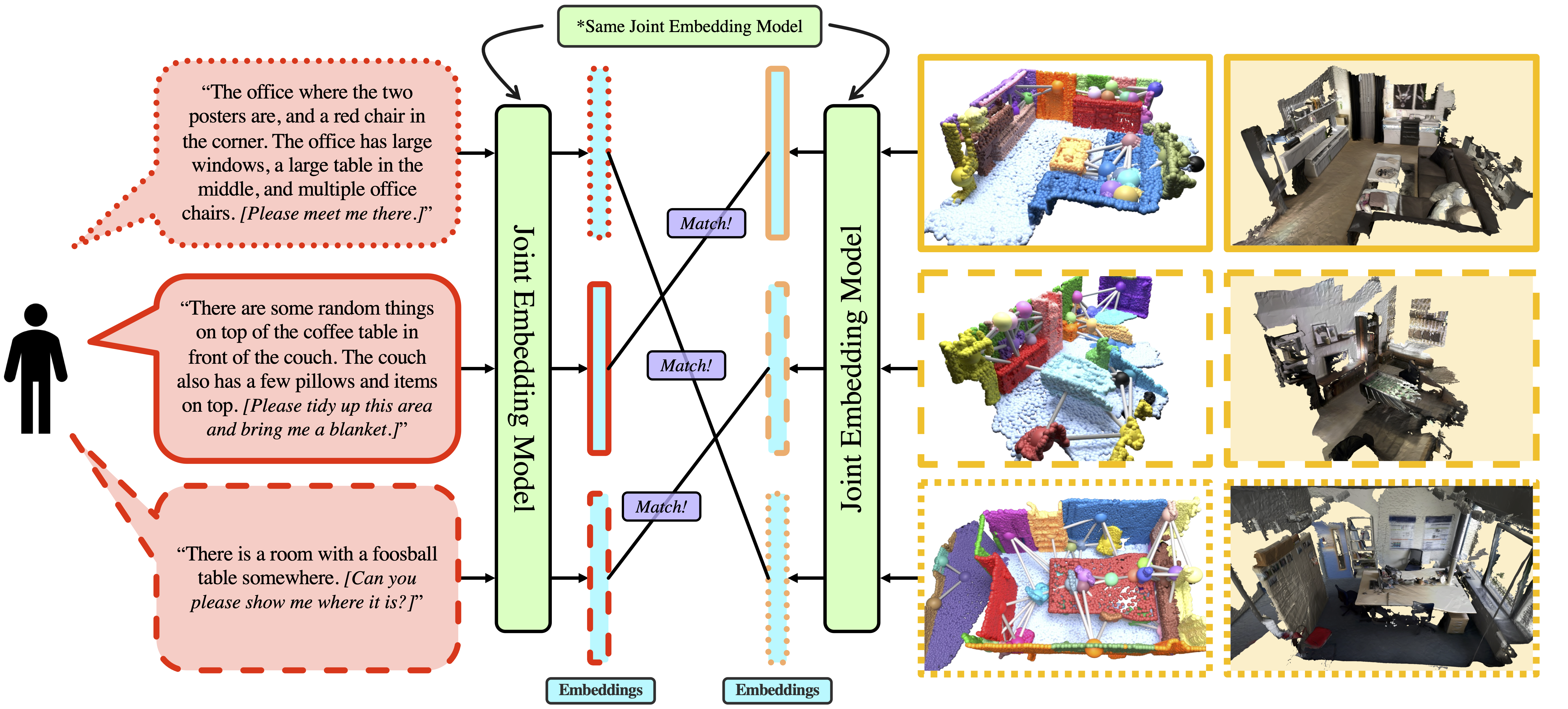
“Where am I?” Scene Retrieval with Language
J Chen, D Barath, I Armeni, M Pollefeys, H Blum
OpenDAS: Open-Vocabulary Domain Adaptation for Segmentation
G Yilmaz, S Peng, M Pollefeys, F Engelmann, H Blum
SNI-SLAM: Semantic Neural Implicit SLAM
S Zhu, G Wang, H Blum, J Liu, L Song, M Pollefeys, H Wang
A 3D Mixed Reality Interface for Human-Robot Teaming
J Chen, B Sun, M Pollefeys, H Blum
Active Visual Localization for Multi-Agent Collaboration: A Data-Driven Approach
M Hanlon, B Sun, M Pollefeys, H Blum
🏆 Best Paper at ICRA 24 Mobile Manipulation Workshop
Spot-Compose: A Framework for Open-Vocabulary Object Retrieval and Drawer Manipulation in Point Clouds
O Lemke, Z Bauer, R Zurbrügg, M Pollefeys, F Engelmann, H Blum
fully automatic labels on the quality level of ScanNet
LabelMaker: Automatic Semantic Label Generation from RGB-D Trajectories
S Weder*, H Blum*, F Engelmann, M Pollefeys
Unsupervised Continual Semantic Adaptation through Neural Rendering
Z Liu, F Milano, J Frey, M Hutter, R Siegwart, H Blum, C Cadena
my PhD thesis
Self-improving, Open-World Robotic Scene Understanding
H Blum, undefined
🏆 Best Paper Runner-up at the 2021 NeurIPS Robot Learning Workshop
Continual Adaptation of Semantic Segmentation Using Complementary 2D-3D Data Representations
J Frey, H Blum, F Milano, R Siegwart, C Cadena
IEEE Robotics and Automation Letters 2022
mm-precise RGBD pointclouds
SL Sensor: An open-source, real-time and robot operating system-based structured light sensor for high accuracy construction robotic applications
Automation in Construction 2022
SCIM: Simultaneous Clustering, Inference, and Mapping for Open-World Semantic Scene Understanding
H Blum, M G. Müller, A Gawel, R Siegwart, C Cadena
🏆 Best Paper at IROS 2023 WS 'Frontier Vision & Learning Techniques'
See Yourself in Others: Attending Multiple Tasks for Own Failure Detection
Interactive OAISYS: A photorealistic terrain simulation for robotics research
M G Müller, J Lim, L Schmid, H Blum, W Stürzl, undefined Abel Gawel, R Siegwart, R Triebel
integrates our NeurIPS workshop work into a fully autonomous press-start-and-leave domain adaptation
Embodied Active Domain Adaptation for Semantic Segmentation via Informative Path Planning
Global Localization in Meshes
Precise Robot Localization in Architectural 3D Plans
Pixel-wise Anomaly Detection in Complex Driving Scenes
G Di Biase*, H Blum*, R Siegwart, C Cadena
Our new concept for robots that learn on their own
Self-Improving Semantic Perception for Indoor Localisation
Conference on Robot Learning 2021
SegmentMeIfYouCan: A Benchmark for Anomaly Segmentation
R Chan*, K Lis*, S Uhlemeyer*, H Blum*, S Honari, R Siegwart, P Fua, M Salzmann, M Rottmann
NeurIPS 2021 - Dataset Track
Accurate Mapping and Planning for Autonomous Racing
L Andresen*, A Brandemuehl*, A Hönger*, B Kuan*, N Vödisch*, H Blum, V Reijgwart, L Bernreiter, L Schaupp, J J Chung, M Bürki, M R Oswald, R Siegwart, A Gawel
Online Synchronization of Building Model for On-Site Mobile Robotic Construction
Fishyscapes: A benchmark for safe semantic segmentation in autonomous driving
first mayor work of our interdisciplinary construction-robotics team
A Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction
A Gawel, H Blum, J Pankert, K Krämer, L Bartolomei, S Ercan, F Farshidian, M Chli, F Gramazio, R Siegwart, M Hutter, T Sandy
Active Learning for UAV-based Semantic Mapping
2nd Workshop on Informative Path Planning and Adaptive Sampling, RSS 2019
Learning Densities in Feature Space for Reliable Segmentation of Indoor Scenes
IEEE Robotics and Automation Letters (RA-L) 2019
The Fishyscapes Benchmark: Measuring Blind Spots in Semantic Segmentation
H Blum*, PE Sarlin*, J Nieto, R Siegwart, C Cadena

Modular Sensor Fusion for Semantic Segmentation
H Blum, A Gawel, R Siegwart, C Cadena
Obstacle avoidance and target acquisition for robot navigation using a mixed signal analog/digital neuromorphic processing system