|
|
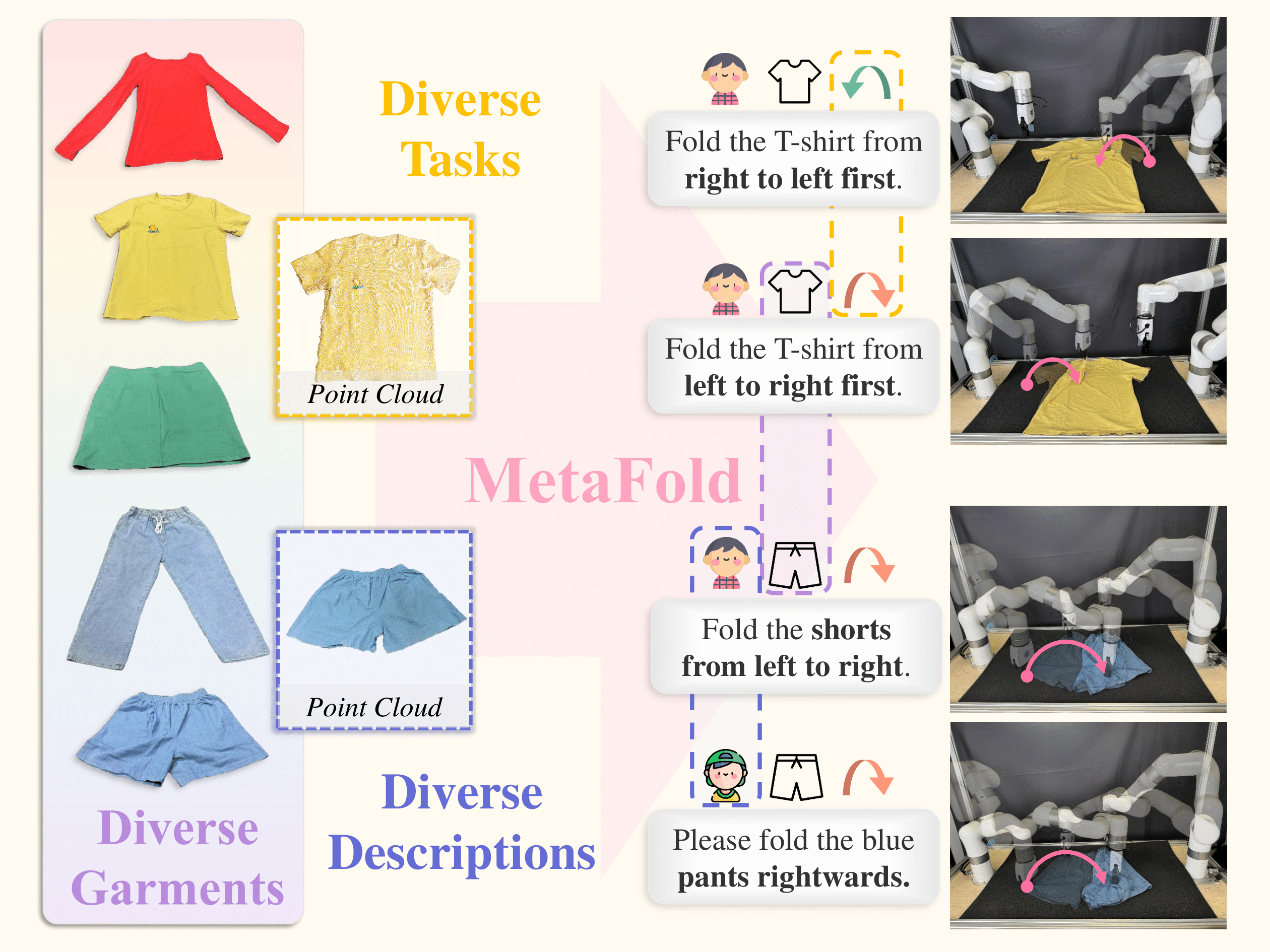 |
**MetaFold: Language-Guided Multi-Category Garment Folding Framework via Trajectory Generation and Foundation Model**Haonan Chen, Junxiao Li, Ruihai Wu, Yiwei Liu, Yiwen Hou, Zhixuan Xu, Jingxiang Guo, Chongkai Gao, Zhenyu Wei, Shensi Xu, Jiaqi Huang, Lin ShaoArxiv paper project video |
|
|
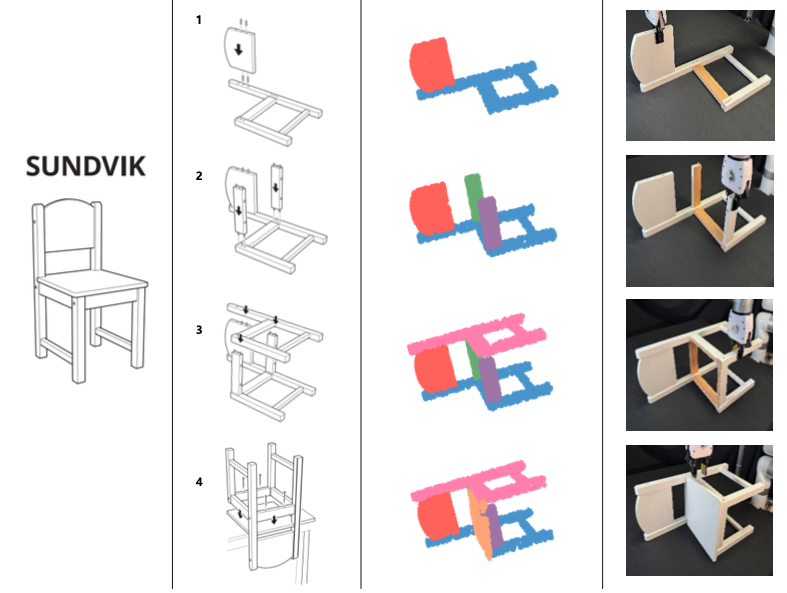 |
Manual2Skill: Learning to Read Manuals and Acquire Robotic Skills for Furniture Assembly Using Vision-Language Models Chenrui Tie, Shengxiang Sun, Jinxuan Zhu, Yiwei Liu, Jingxiang Guo, Yue Hu, Haonan Chen, Junting Chen, Ruihai Wu, Lin ShaoProceedings of Robotics: Science and Systems (RSS) 2025 paper project video |
|
|
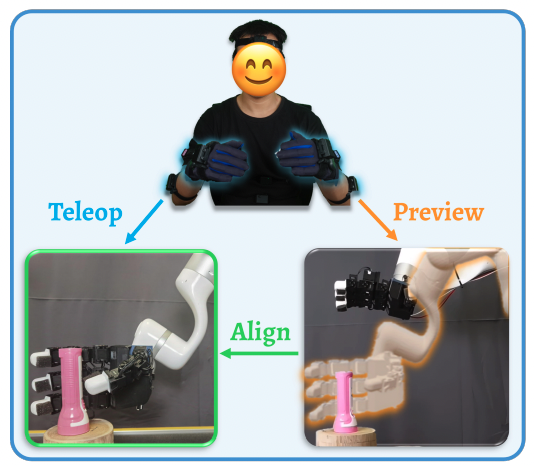 |
TelePreview: A User-Friendly Teleoperation System with Virtual Arm Assistance for Enhanced Effectiveness Jingxiang Guo, Jiayu Luo, Zhenyu Wei, Yiwen Hou, Zhixuan Xu, Xiaoyi Lin, Chongkai Gao, Lin ShaoArxiv paper project video |
|
|
 |
EMOS: Embodiment-aware Heterogeneous Multi-robot Operating System with LLM Agents Junting Chen, Checheng Yu, Xunzhe Zhou, Tianqi Xu, Yao Mu, Mengkang Hu, Wenqi Shao, Yikai Wang, Guohao Li, Lin ShaoInternational Conference on Learning Representations (ICLR) 2025 paper project video |
|
|
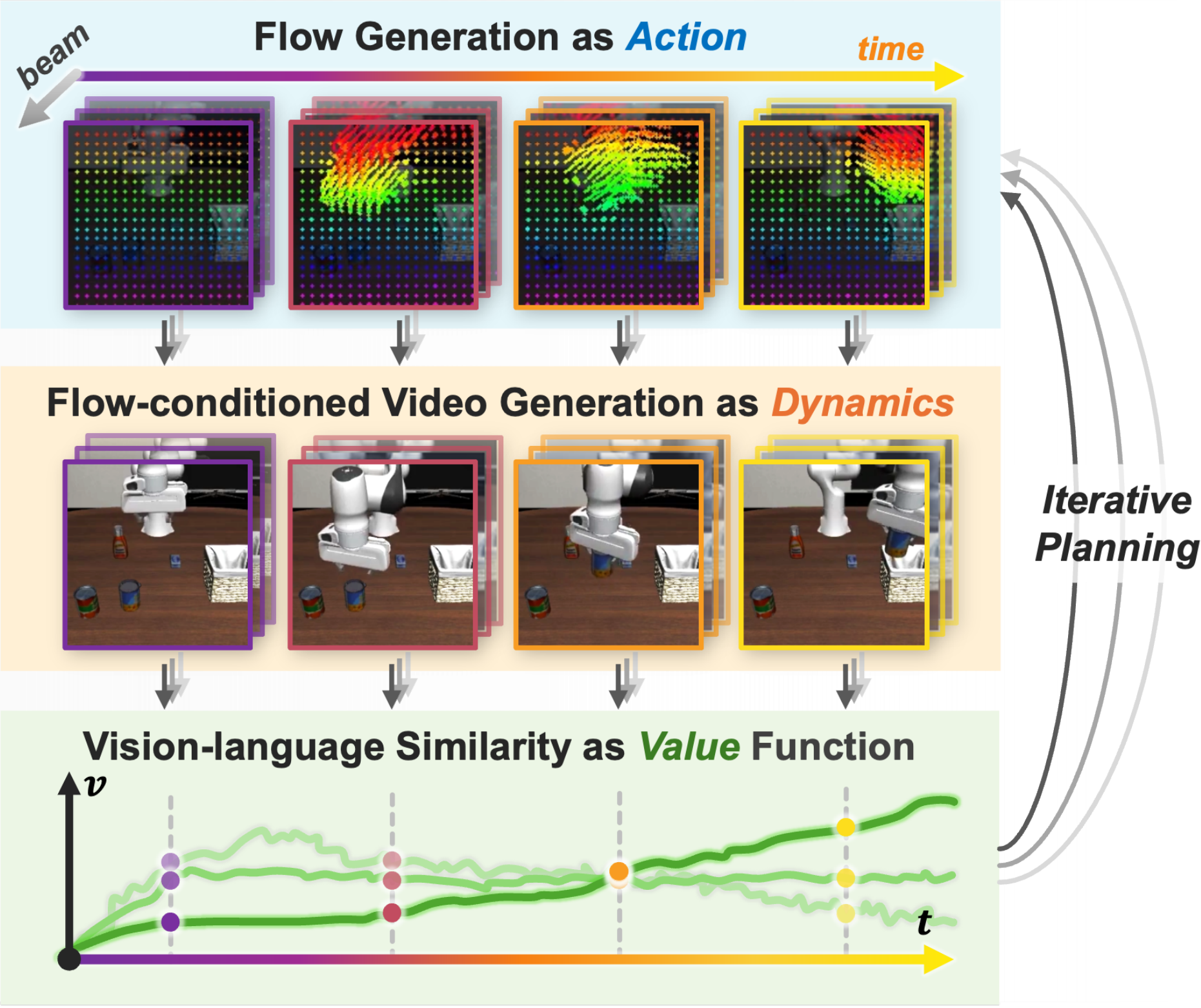 |
FLIP: Flow-Centric Generative Planning as General-Purpose Manipulation World Model Chongkai Gao, Haozhuo Zhang, Zhixuan Xu, Zhehao Cai, Lin Shao International Conference on Learning Representations (ICLR) 2025 paper project video code |
|
|
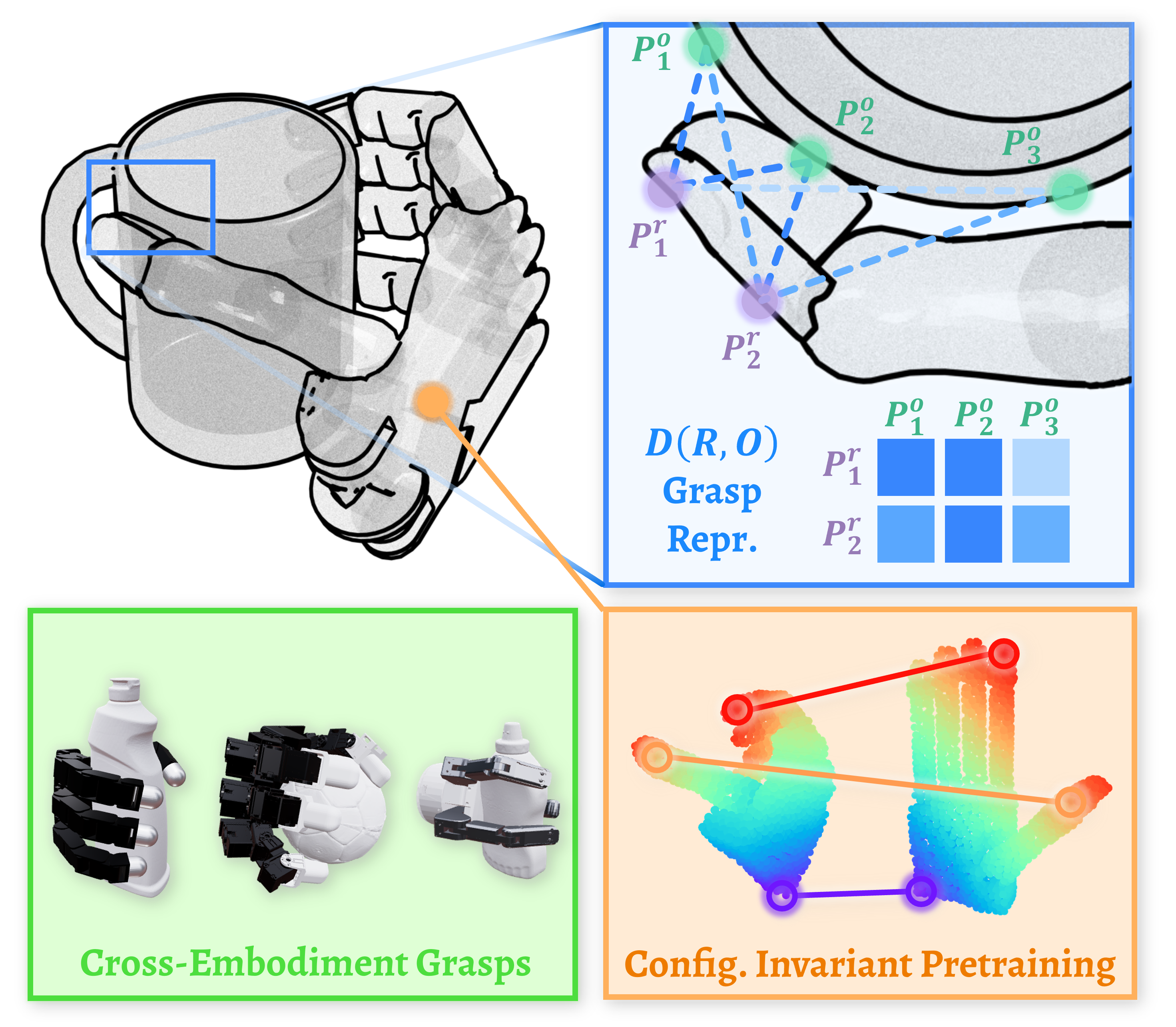 |
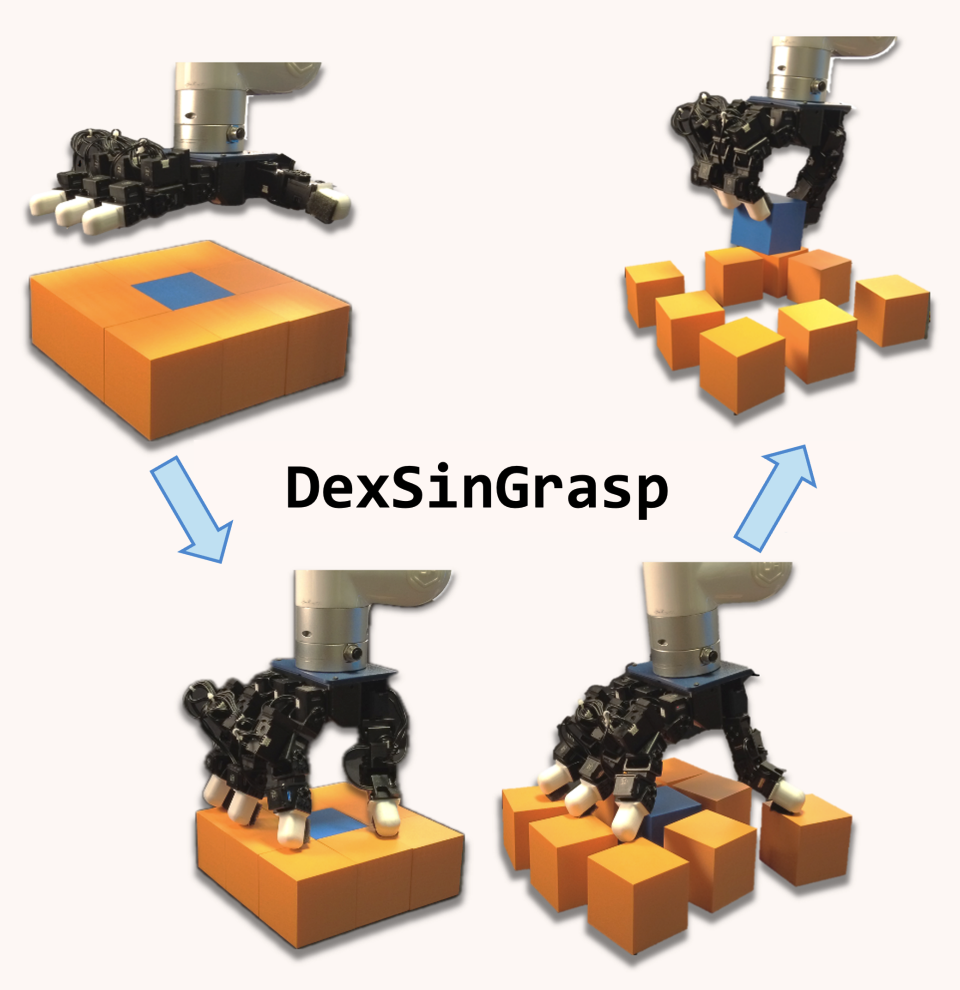
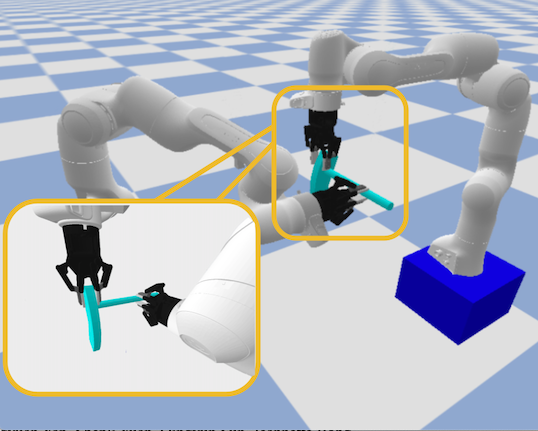
D(R,O) Grasp: A Unified Representation of Robot and Object Interaction for Cross-Embodiment Dexterous Grasping Zhenyu Wei*, Zhixuan Xu*, Jingxiang Guo, Yiwen Hou, Chongkai Gao, Zhehao Cai, Jiayu Luo, Lin ShaoIEEE International Conference on Robotics and Automation (ICRA) 2025 Best Robotics Paper Award at CoRL MAPoDeL Workshop Best Paper Award finalist at ICRA 2025 Best Paper Award on Robot Manipulation and Locomotion at ICRA 2025 paper project video code |
|
|
 |
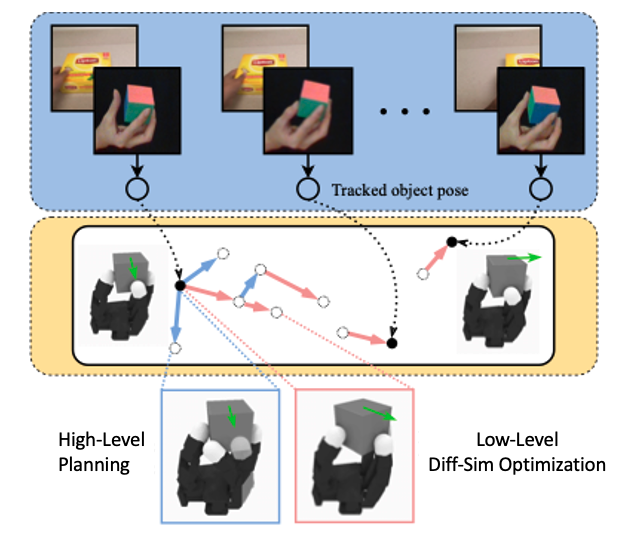
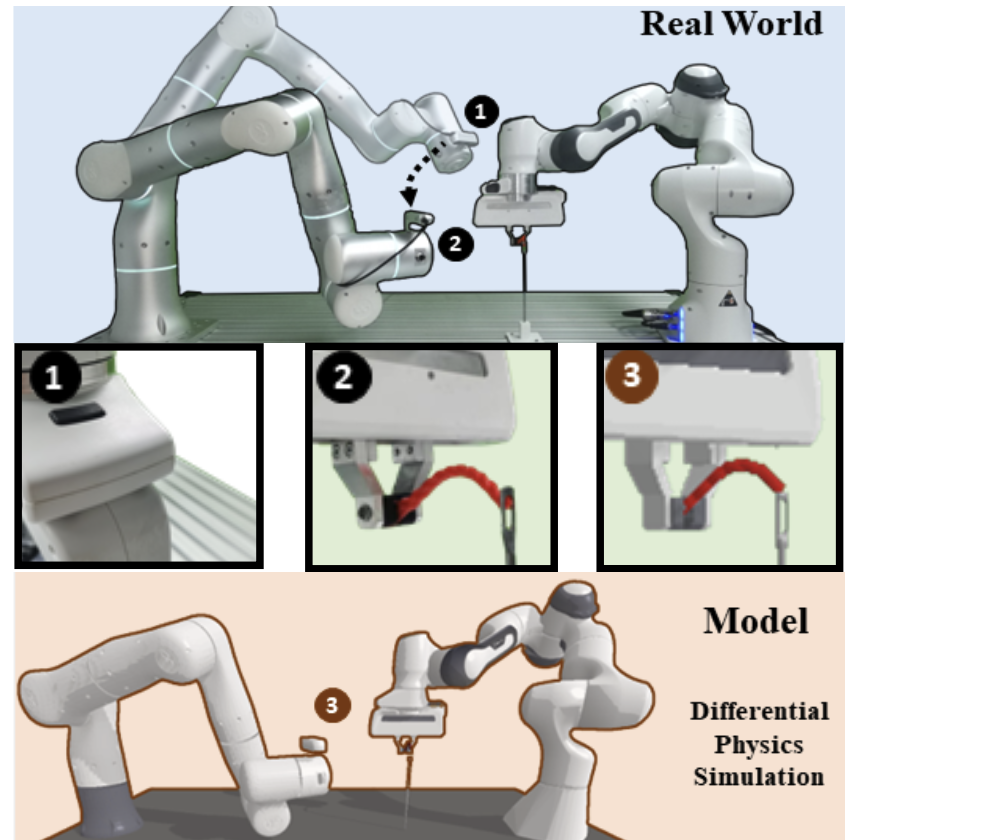
TieBot: Model-based Learning to Knot a Tie from Visual Demonstration via Differentiable Physics-based Simulation Weikun Peng, Jun Lv, Yuwei Zeng, Haonan Chen, Siheng Zhao, Jichen Sun, Cewu Lu, and Lin ShaoConference on Robot Learning (CoRL) 2024 (Oral) paper project video |
|
|
 |
RiEMann: Near Real-Time SE(3)-Equivariant Robot Manipulation without Point Cloud Segmentation Chongkai Gao, Zhengrong Xue, Shuying Deng, Tianhai Liang, Siqi Yang, Lin Shao, Huazhe XuConference on Robot Learning (CoRL) 2024 paper project video |
|
|
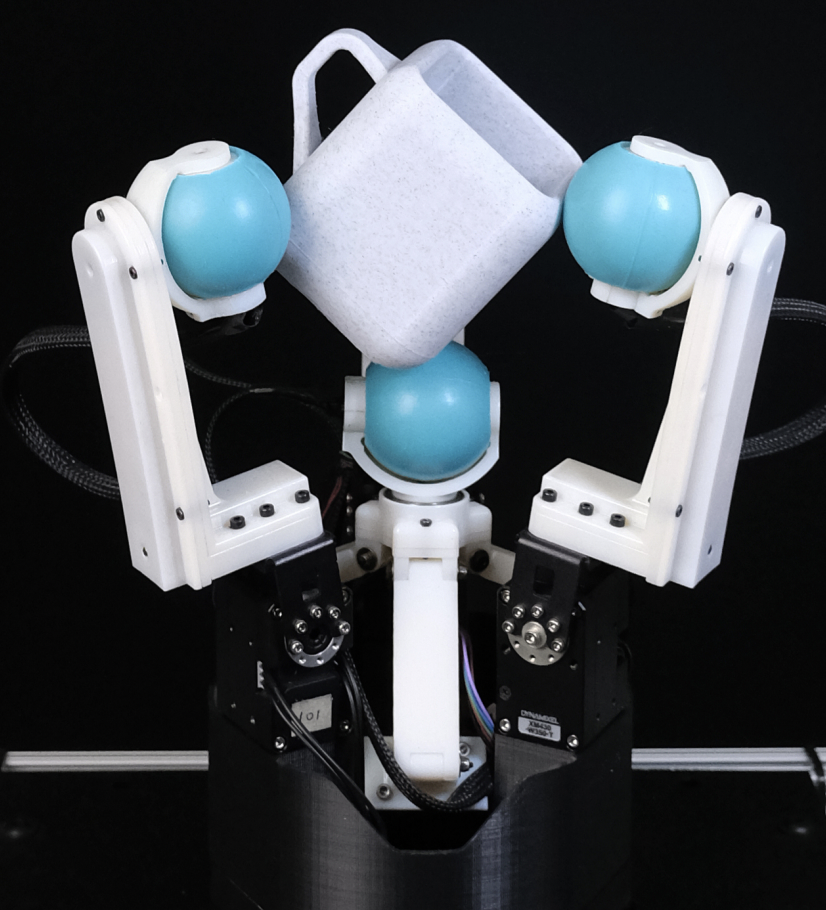 |
Design and Control of Roller Grasper V3 for In-Hand Manipulation Shenli Yuan, Lin Shao, Yunhai Feng, Jiatong Sun, Teng Xue, Connor Yako, Jeannette Bohg, Kenneth SalisburyIEEE Transactions on Robotics paper project |
|
|
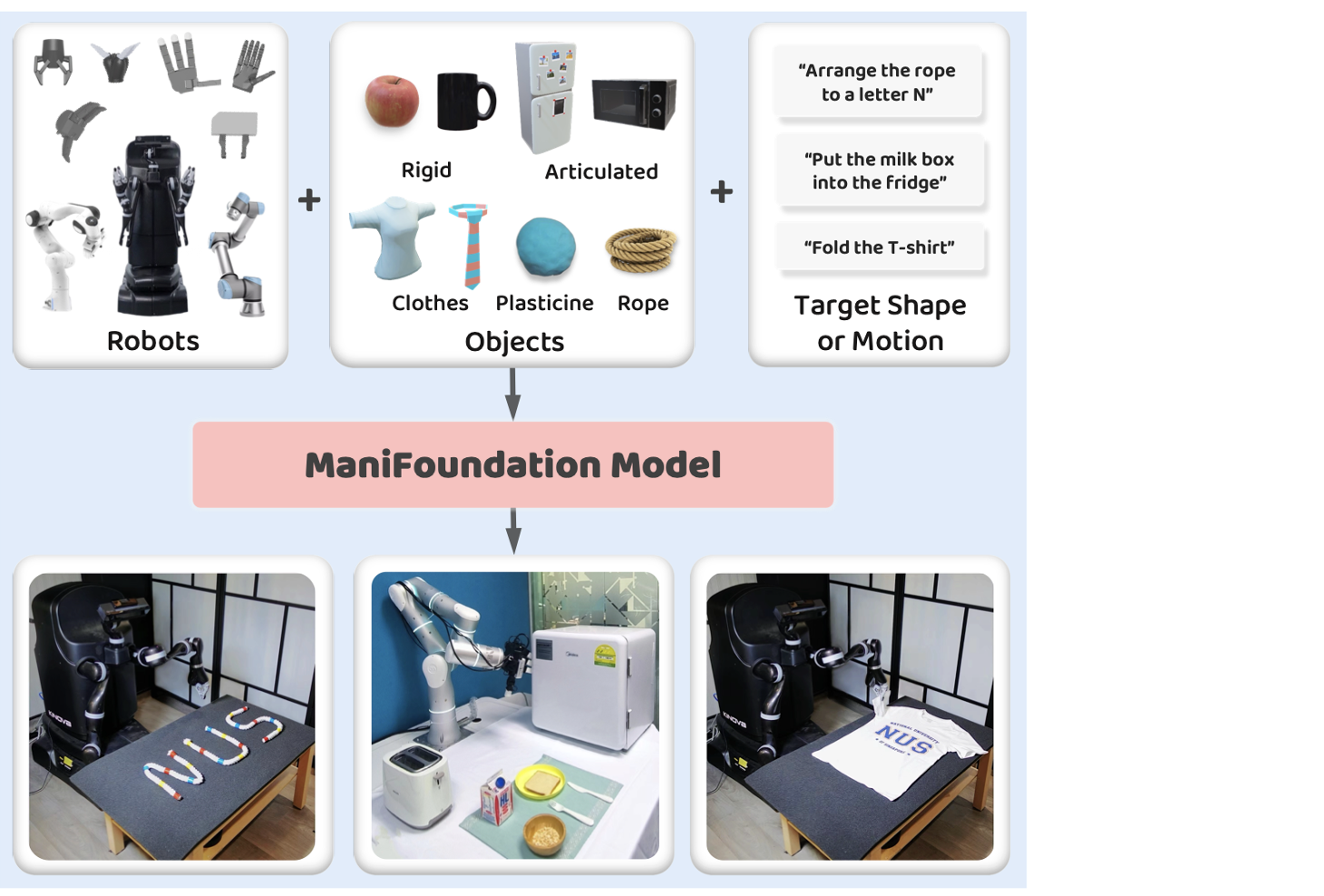 |
ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots Zhixuan Xu*, Chongkai Gao*, Zixuan Liu*, Gang Yang*, Chenrui Tie, Haozhuo Zheng, Haoyu Zhou, Weikun Peng, Debang Wang, Tianyi Chen, Zhouliang Yu, Lin ShaoIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 (Oral) paper project video code |
|
|
 |
SoftMAC: Differentiable Soft Body Simulation with Forecast-based Contact Model and Two-way Coupling with Articulated Rigid Bodies and Clothes Min Liu, Gang Yang, Siyuan Luo, Chen Yu, and Lin Shao IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 paper project video |
|
|
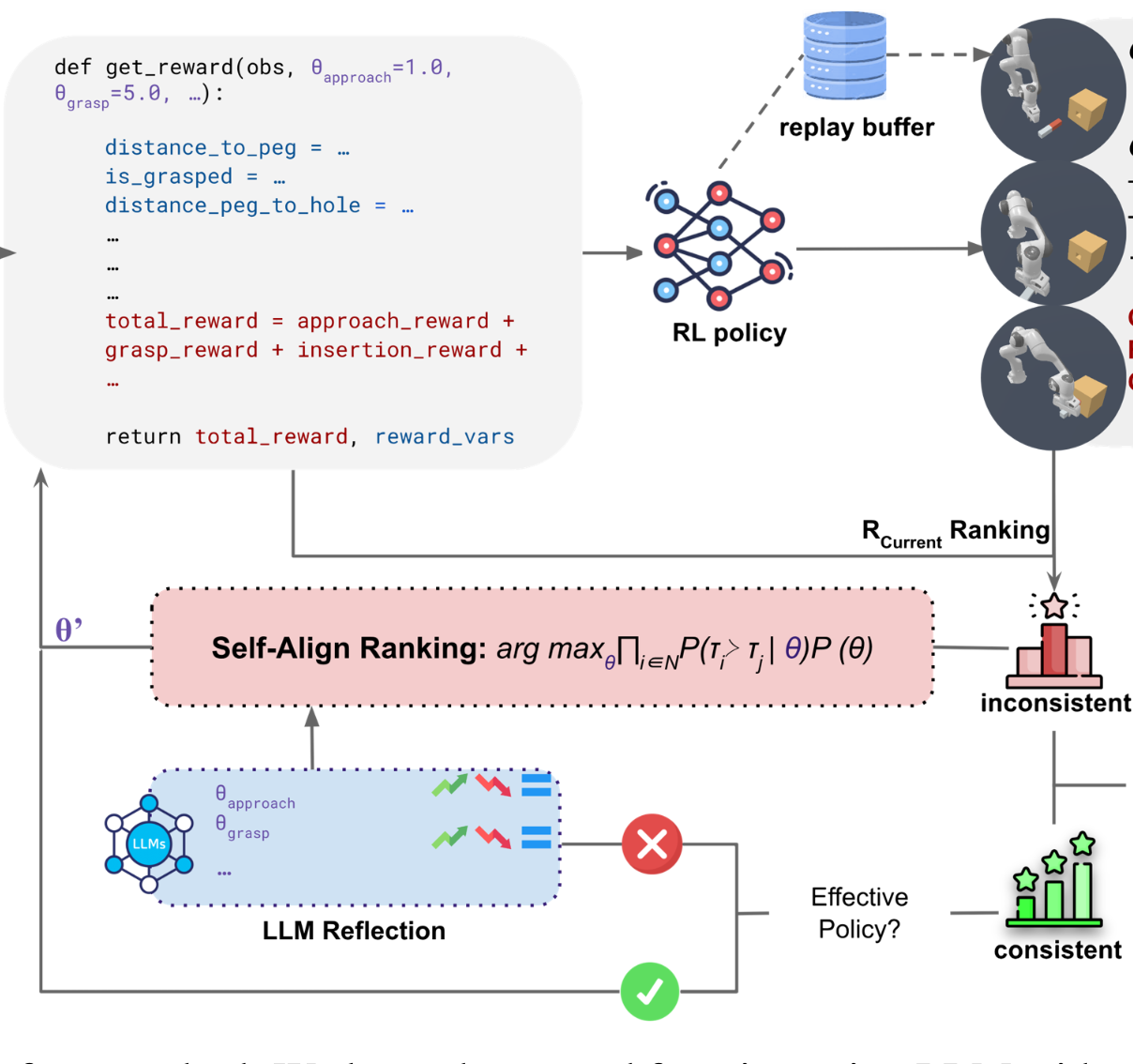 |
**Learning Reward for Robot Skills Using Large Language Models via Self-Alignment**Yuwei Zeng, Yao Mu, Lin Shao International Conference on Machine Learning (ICML) 2024 paper project |
|
|
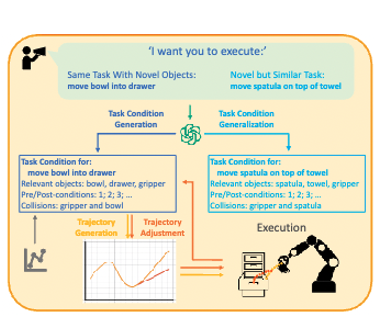 |
Generalizable Long-Horizon Manipulations with Large Language Models Haoyu Zhou, Mingyu Ding, Weikun Peng, Masayoshi Tomizuka, Lin Shao and Chuang GanArxiv paper project video |
|
|
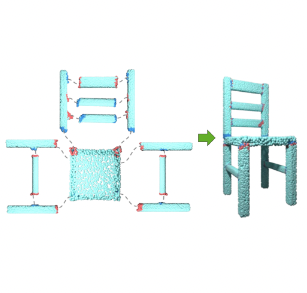 |
**Category-Level Multi-Part Multi-Joint 3D Shape Assembly**Yichen Li, Kaichun Mo, Yueqi Duan, He Wang, Jiequan Zhang, Lin Shao, Wojciech Matusik and Leonidas J. Guibas IEEE/CVF Conference on Computer Vision and Pattern Recognition 2024 (CVPR)project video |
|
|
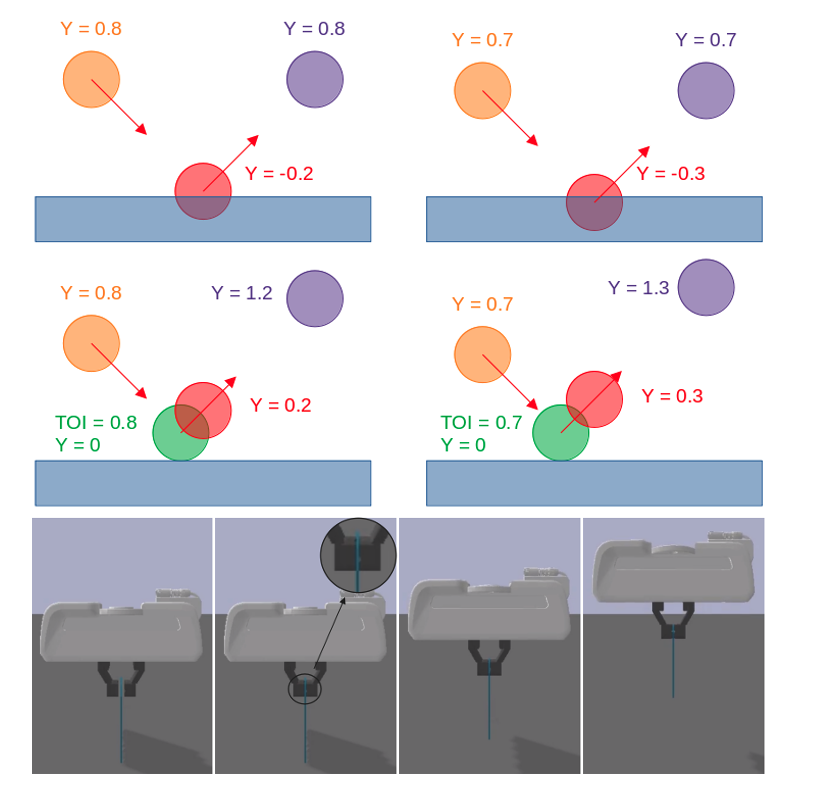 |
Jade: A Differentiable Physics Engine for Articulated Rigid Bodies with Intersection-Free Frictional Contact Gang Yang, Siyuan Luo, Yunhai Feng, Zhixin Sun, Chenrui Tie, and Lin Shao IEEE International Conference on Robotics and Automation (ICRA) 2024 paper project video |
|
|
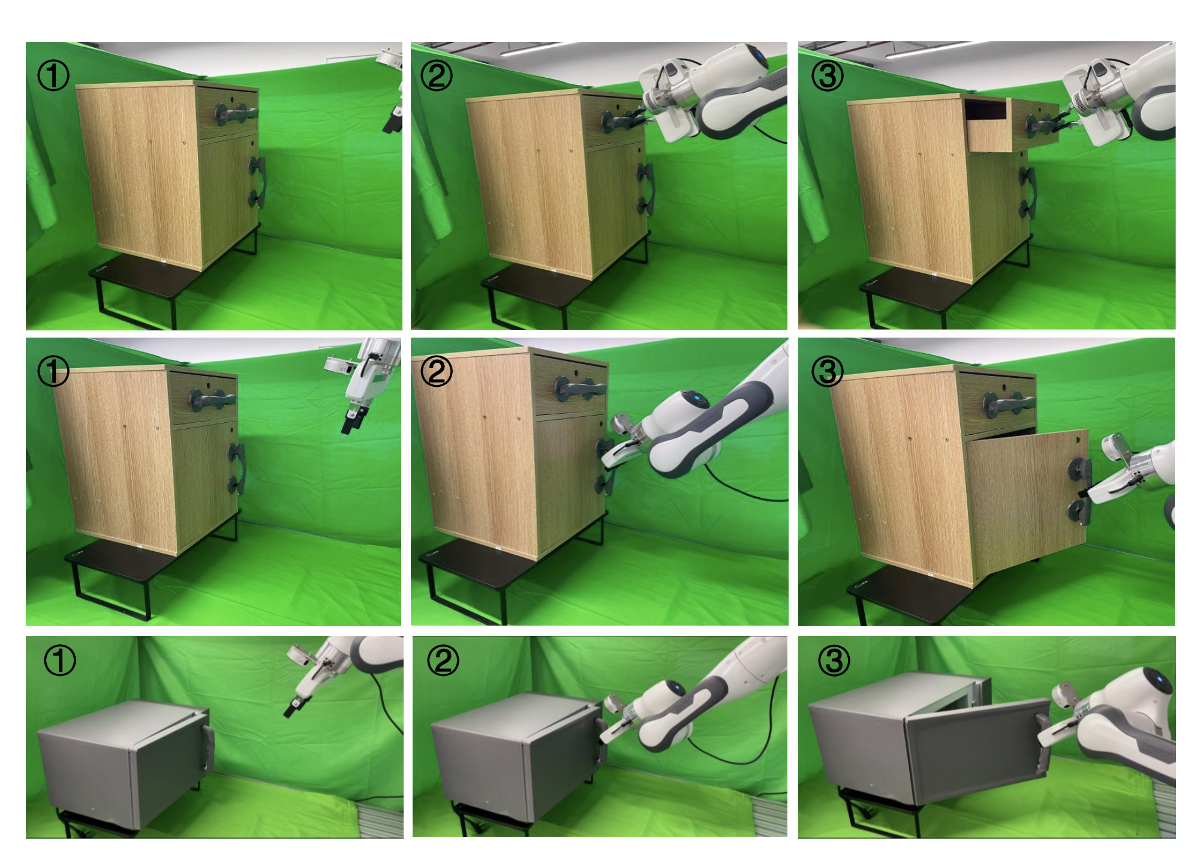 |
GAMMA: Generalizable Articulation Modeling and Manipulation for Articulated Objects Qiaojun Yu, Junbo Wang, Wenhai Liu, Ce Hao, Liu Liu, Lin Shao, Weiming Wang and Cewu Lu IEEE International Conference on Robotics and Automation (ICRA) 2024 paper project video |
|
|
 |
Diff-LfD: Contact-aware Model-based Learning from Visual Demonstration for Robotic Manipulation via Differentiable Physics-based Simulation and Rendering Xinghao Zhu, Jinghan Ke, Zhixuan Xu, Zhixin Sun, Bizhe Bai, Jun Lv, Qingtao Liu, Yuwei Zeng, Qi Ye, Cewu Lu, Masayoshi Tomizuka, Lin ShaoConference on Robot Learning (CoRL) 2023 (Oral) paper project video |
|
|
 |
ClothesNet: An Information-Rich 3D Garment Model Repository with Simulated Clothes Environment Bingyang Zhou, Haoyu Zhou, Tianhai Liang, Qiaojun Yu, Siheng Zhao, Yuwei Zeng, Jun Lv, Siyuan Luo, Qiancai Wang, Xinyuan Yu, Haonan Chen, Cewu Lu, and Lin ShaoIEEE/CVF International Conference on Computer Vision (ICCV) 2023 paper project video |
|
|
 |
DexRepNet: Learning Dexterous Robotic Grasping Network with Geometric and Spatial Hand-Object Representations Qingtao Liu*, Yu Cui*, Qi Ye, Zhengnan Sun, Haoming Li, Gaofeng Li, Lin Shao, Jiming ChenIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023 paper projectvideo |
|
|
 |
DiffClothAI: Differentiable Cloth Simulation with Intersection-free Frictional Contact and Differentiable Two-Way Coupling with Articulated Rigid Bodies Xinyuan Yu*, Siheng Zhao*, Siyuan Luo, Gang Yang, and Lin ShaoIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023 paper project video |
|
|
 |
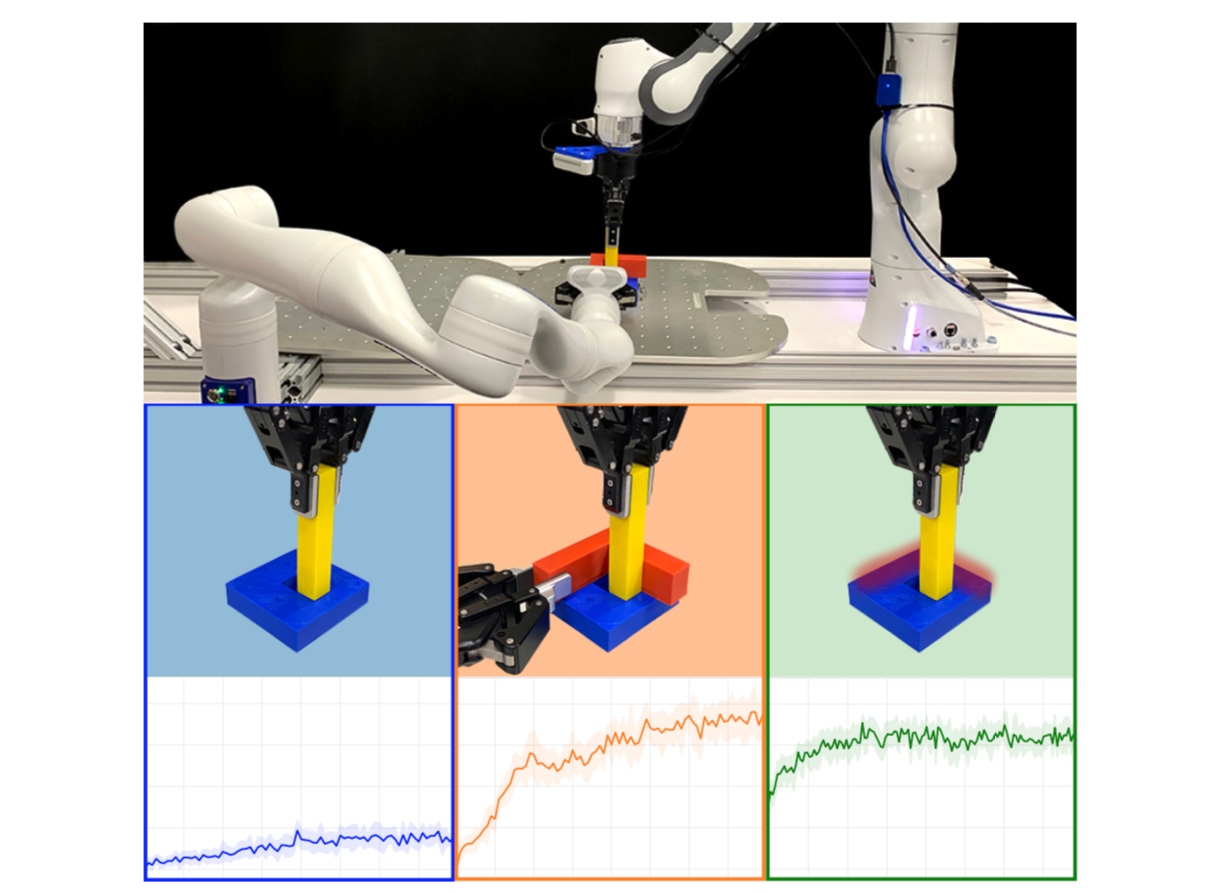
**SAM-RL: Sensing-Aware Model-based Reinforcement Learning via Differentiable Physics-based Simulation and Rendering**Jun Lv, Yunhai Feng, Cheng Zhang, Shuang Zhao, Lin Shao* and Cewu Lu*Proceedings of Robotics: Science and Systems (RSS) 2023 The International Journal of Robotics Research (IJRR) Best System Paper Award finalist paper project video |
|
|
 |
**SAGCI-System: Towards Sample-Efficient, Generalizable, Compositional, and Incremental Robot Learning**Jun Lv*, Qiaojun Yu*, Lin Shao*, Wenhai Liu, Wenqiang Xu and Cewu LuIEEE International Conference on Robotics and Automation (ICRA) 2022 paper project video |
|
|
 |
**RoboAssembly: Learning Generalizable Furniture Assembly Policy in a Novel Multi-robot Contact-rich Simulation Environment**Mingxin Yu*, Lin Shao*, Zhehuan Chen, Tianhao Wu, Qingnan Fan, Kaichun Mo, and Hao DongArxiv Preprint, 2021 paper project |
|
|
 |
**Learning to Regrasp by Learning to Place**Shuo Cheng, Kaichun Mo, Lin ShaoConference on Robot Learning (CoRL) 2021 paper project code |
|
|
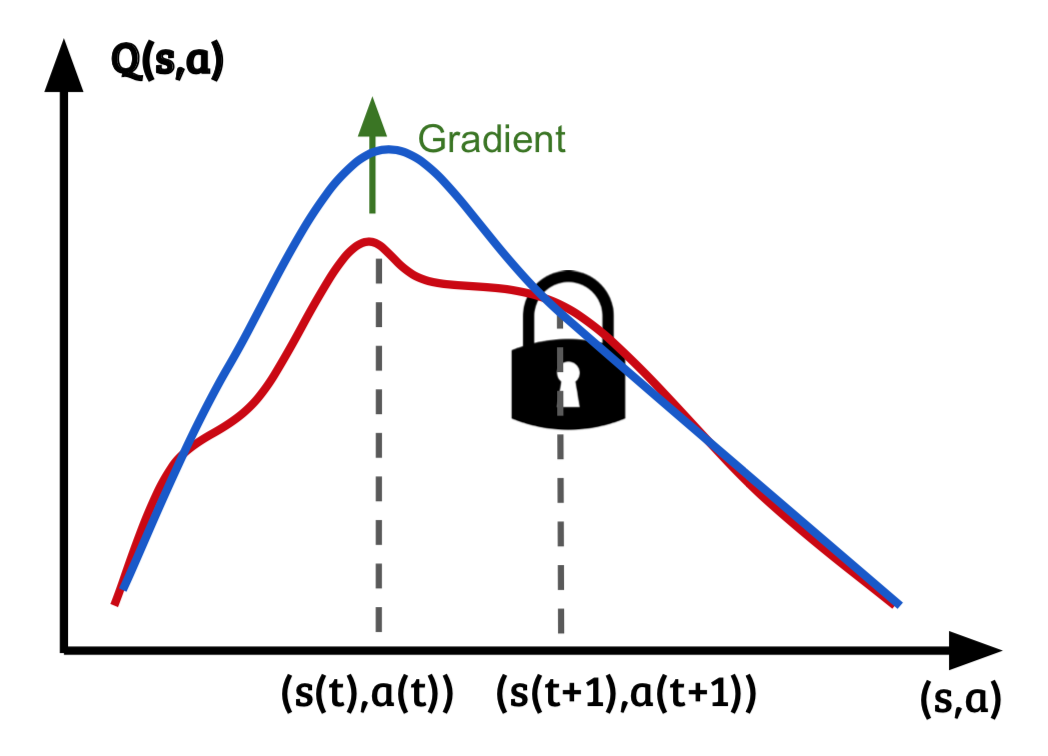 |
**GRAC: Self-Guided and Self-Regularized Actor-Critic**Lin Shao, Yifan You, Mengyuan Yan, Shenli Yuan, Qingyun Sun, Jeannette BohgConference on Robot Learning (CoRL) 2021 paper project code |
|
|
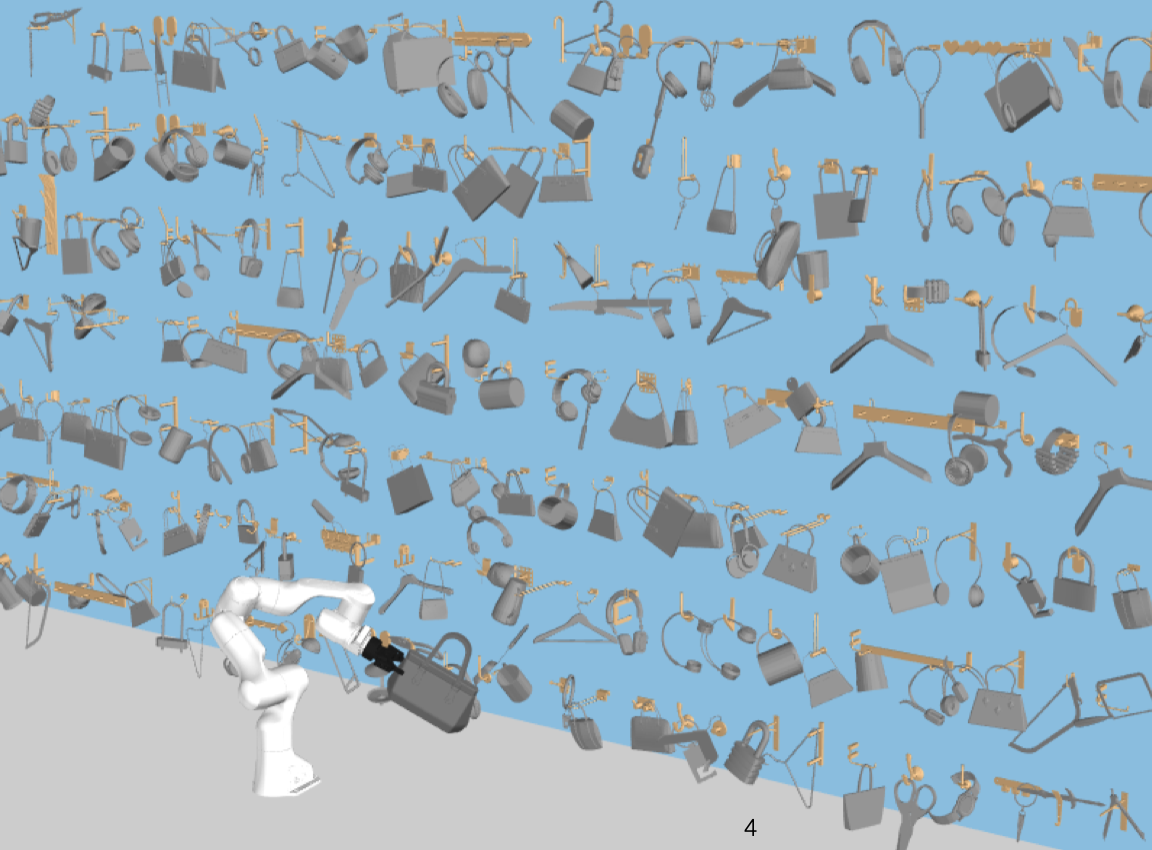 |
**OmniHang: Learning to Hang Arbitrary Objects Using Contact Point Correspondences and Neural Collision Estimation **Yifan You*, Lin Shao*, Toki Migimatsu, Jeannette BohgIEEE International Conference on Robotics and Automation (ICRA) 2021 paper project video code |
|
|
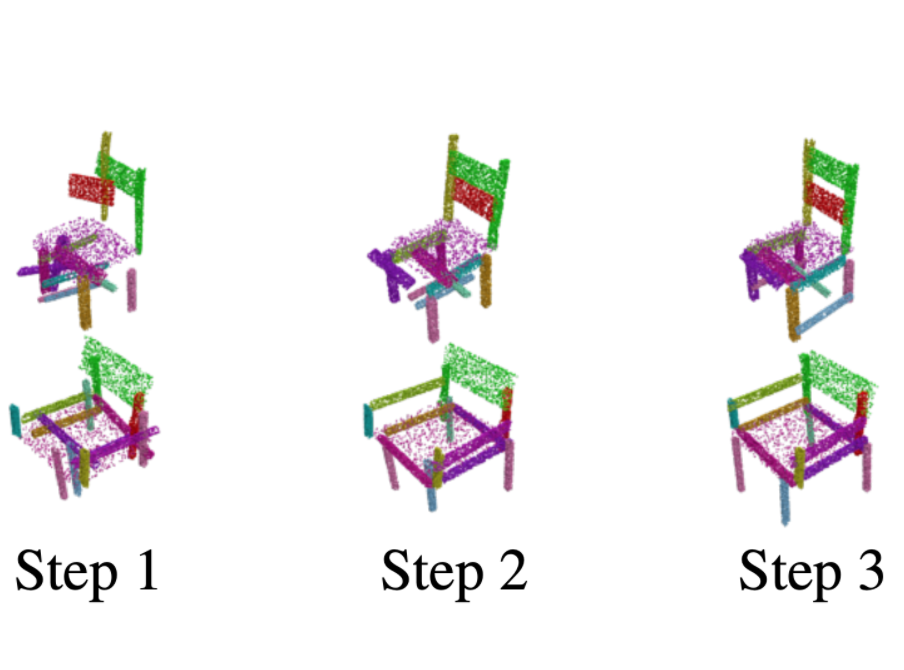 |
**Generative 3D Part Assembly via Dynamic Graph Learning**Jialei Huang*, Guanqi Zhan*, Qingnan Fan, Kaichun Mo, Lin Shao, Baoquan Chen, Leonidas J. Guibas, Hao DongNeurIPS 2020 paper project code |
|
|
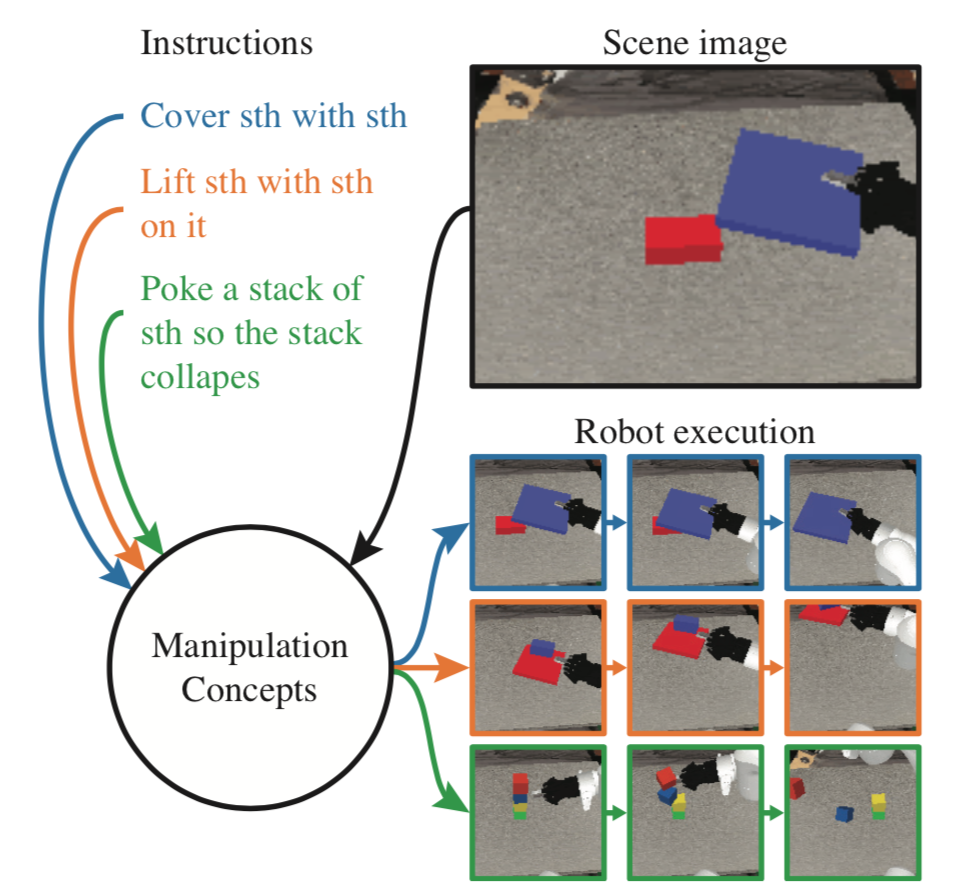 |
**Concept2Robot: Learning Manipulation Concepts from Instructions and Human Demonstrations**Lin Shao, Toki Migimatsu, Qiang Zhang, Karen Yang, Jeannette BohgProceedings of Robotics: Science and Systems (RSS) 2020 The International Journal of Robotics Research (IJRR) paper project video presentation |
|
|
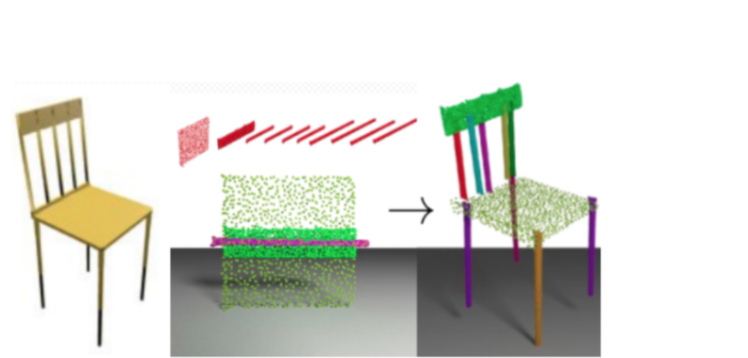 |
**Learning 3D Part Assembly from a Single Image**Yichen Li*, Kaichun Mo*, Lin Shao, Minhyuk Sung, Leonidas J. GuibasECCV 2020 paper project presentation code |
|
|
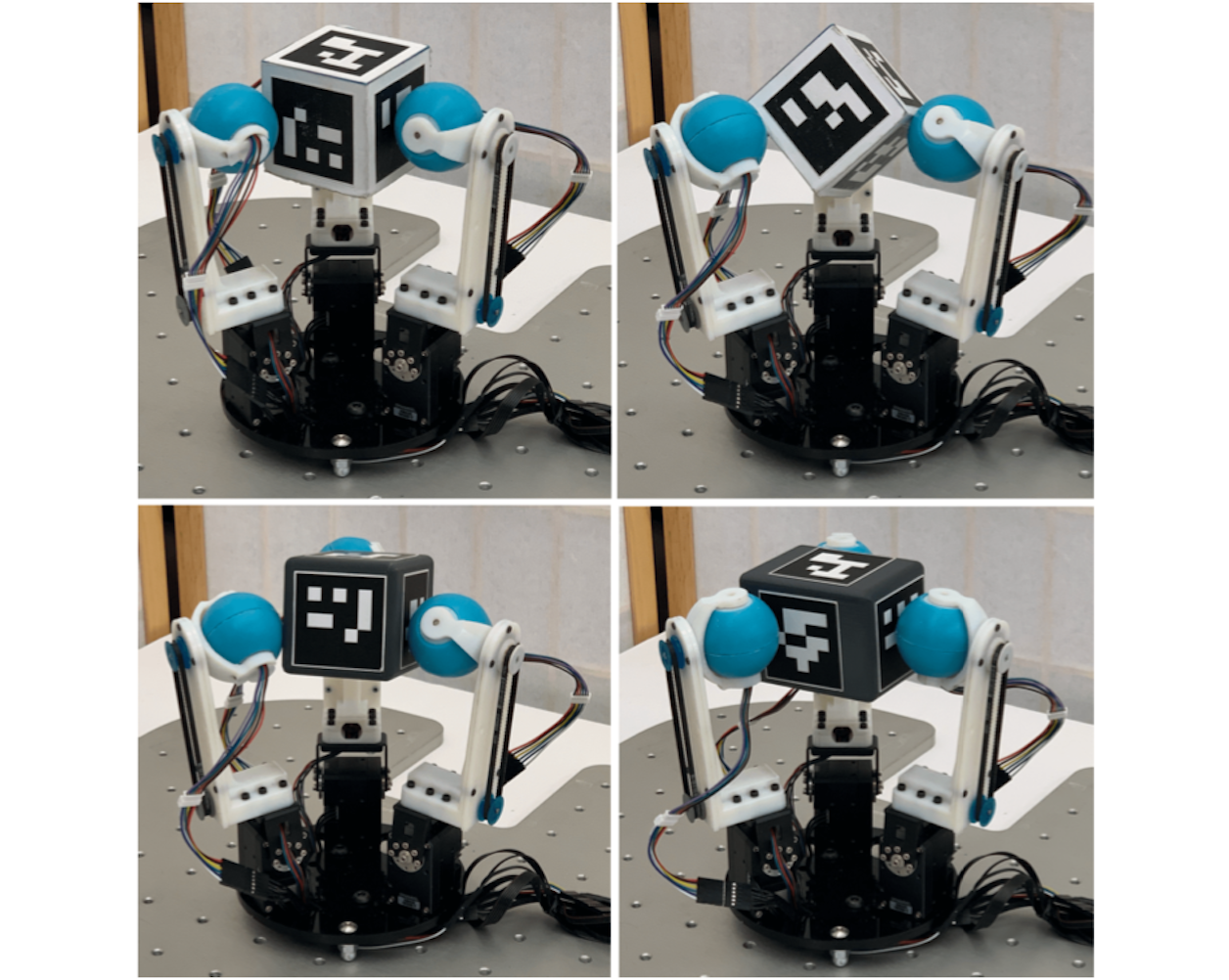 |
**Design and Control of Roller Grasper V2 for In-Hand Manipulation**Shenli Yuan, Lin Shao, Connor L. Yako, Alex Gruebele, and J. Kenneth SalisburyIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020 paper project video code Featured in IEEE Spectrum |
|
|
 |
**Learning to Scaffold the Development of Robotic Manipulation Skills**Lin Shao, Toki Migimatsu, Jeannette BohgIEEE International Conference on Robotics and Automation (ICRA) 2020 paper project video code presentation |
|
|
 |
**UniGrasp: Learning a Unified Model to Grasp with Multifingered Robotic Hands**Lin Shao, Fabio Ferreira*, Mikael Jorda*, Varun Nambiar*, Jianlan Luo, Eugen Solowjow, Juan Aparicio Ojea, Oussama Khatib, Jeannette BohgIEEE Robotics and Automation Letters with ICRA 2020 option paper project video code presentation |
|
|
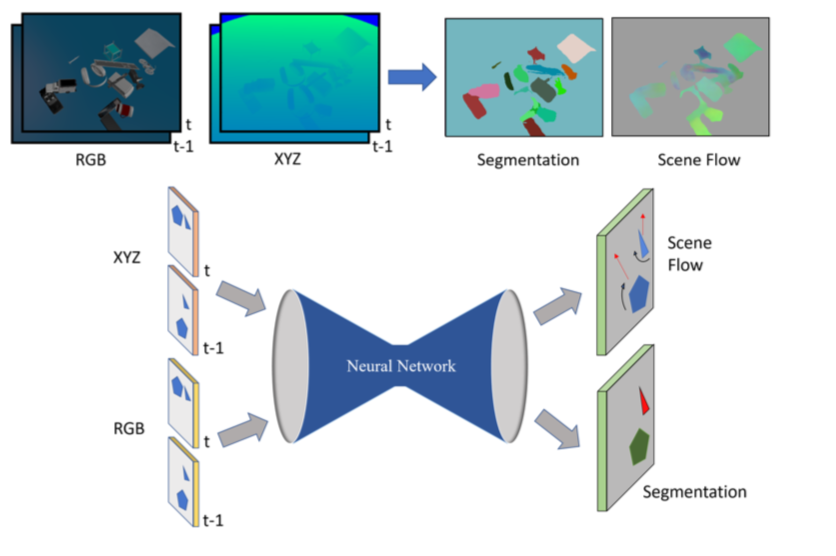 |
**Motion-based Object Segmentation based on Dense RGB-D Scene Flow**Lin Shao, Parth Shah*, Vikranth Dwaracherla*, Jeannette BohgIEEE Robotics and Automation Letters with IROS 2018 option paper project video code |
|
|
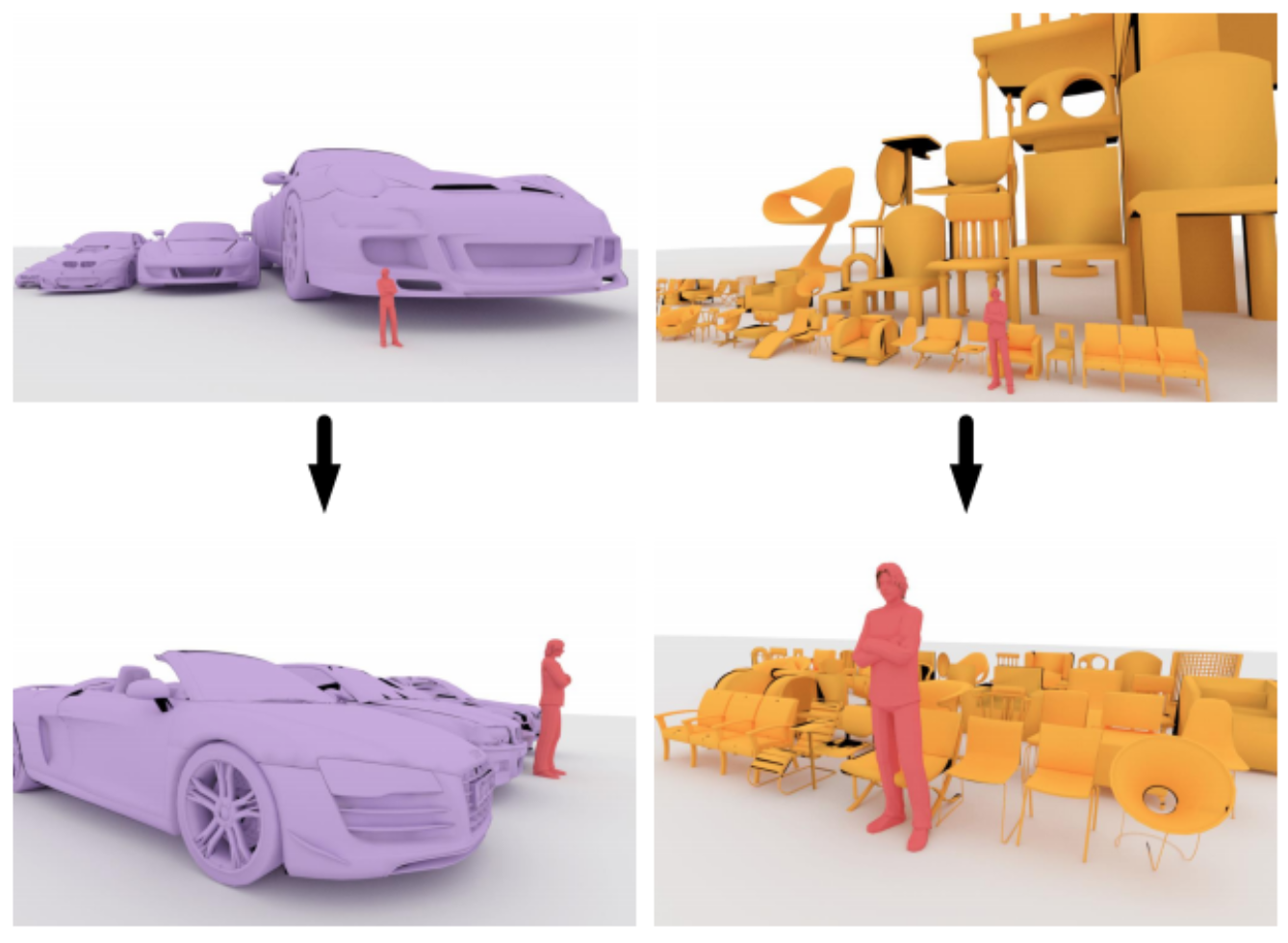 |
**Cross-modal Attribute Transfer for Rescaling 3D Models**Lin Shao, Angel X. Chang, Hao Su, Manolis Savva, Leonidas J. Guibas3DV 2017 paper project |