N_Goのマウス記録 (original) (raw)
は~~~い!
はじめましての人ははじめまして。
そうでない人は元気に過ごしてますか?
やっとブログを書けたN_Goです。
今回は2023年度の全日本大会のことについて書いていきます~
え??大会終わってから2ヶ月経ったって??? んなこと知ってるわい!!
遅くなってすみませんね。心身共に動かんかったんです...
ちょっと記憶が薄れてますがお付き合いお願いいたします。
それでは行ってみよう!!

大会結果
全日本大会もクラッシックマウス競技のみの参加です。
すたすたねずみ

Best走行:0:06.224
走行記録:
1R 0:57.269
2R 0:06.224
3R 0:57.908
4R R
5R Time Out
順位: 7位
走行動画
全体の結果はこちら
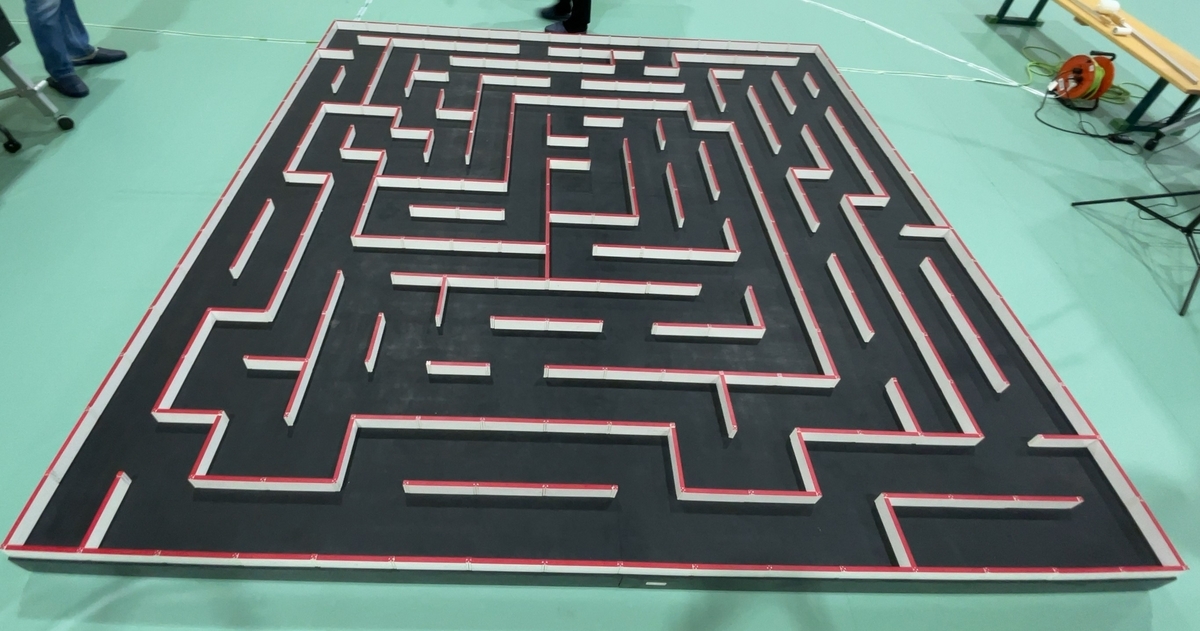
今回は迷路が新作だったようです。過去迷路からしか出ないのでは無かったのか??(嬉しい)
距離は短いが安定して走れる機体でないとゴールができない迷路とされていました。ただ、最短は人によって出る道が違う迷路であり、経路によってはタイムにかなり差が付く迷路だったイメージです。
詳しい意図などは動画のはじめの方で説明されてますので、ご確認ください。

走行内容
1走目:探索走行(成功) 帰り 全面探索(バグが出現して途中で終了)
今回はかなり探索走行が無事できるかを心配していました。バグが潜んでいたからです。内容としては、袋小路などで車体をバックさせるタイミングなどにいきなりモータ駆動、急停止、モータ駆動、急停止…を繰り返します。その挙動がでたらスイッチを切らないと改善しません。その後の直進動作などにも影響します。
この挙動自体は作成時からずっと低頻度に出現はしていたのですが、原因がわからずに直しきれなかったのです。試走会でかなり高頻度に起こるようになってしまって心配していたのです。
あと単純に壁センサの値が安定していないみたいで誤検知しないかが不安でした。
一応、片道は成功したので安堵しましたが、帰りに問題の挙動が... かなり早いタイミングで出たので、時間の無駄としては少なかったので良かったです。タイマーがかかるか帰ってくるまでは帰りの迷路は保存されないようになっているので...
2走目:斜め走行(成功) 0:06.224
ターンの速度は用意してきた速度、直線は...忘れました。攻めてはないけど速めだった気がする。(わからん)
経路としてはほぼ斜めのない簡単な経路です。重ね探索をせずに2次走行を行ったのは記録を残しておきたかったからです。
吸引機構を使用して大会でゴールしたのはこれが初めてです。ただ、タイムとしては遅いですね。これより上は3秒台を出してますからね。
ちゃんと記録は残ったので安心はしました。
3走目:探索走行(成功) 帰り 往復探索(成功)
これね、選択ミスったんすよ... 本当は重ね探索をしたかったんですよ。このモードはマップを初期化してから始めるので無駄な行き探索をしてしまっています。
ゴールセンサーのズレがあって少し考える時間を貰ってたのにミスりましたからね。ズレの原因はマウスの激突のせいだからバチが当たったのかな?
ちゃんとカンペ見て確認したのに、自分の認識ミスで間違えましたからね。カンペの意味無しですよ。カンペを見たけど読んでなかった。人間焦ってるとこうなります。
迷路データとしてはこうなっていました。

4走目:斜め走行(失敗)
もうラストかもしれないと思って攻めたパラメータにしてたと思います。失敗の原因は直進加速でのズレを補正できずにターンに侵入したからだと思っています。なので直線の加速度を落とせば激突した箇所は抜けられたのかもしれません。
まぁ失敗したので結果にはならず、2走目を行っていてよかったなという結果でした。
2走目が黄色で、4走目で走ろうとしていた経路が青色ですね。うーん。タイムはよくなっていたかもしれない?走らせてみないとよくわからないけど。

5走目:Time Out
いろいろトラブルがあったものの、時間が足りないというのは残念なものです。
やっぱり出走までの調整時間が長いので、どうにか工夫したいものです。いつも言ってる気がする...
総評:記録は残せたが、思う所の多い結果だった。
結果に対する感想
うーん。悔しくもあり、助かった結果というしか無いかなと思います。
助かった点としては、探索が片道で止まってくれたおかげで2走目の経路で走ることができたことですね。
もし、フル探索ができた、フル探索が途中で終わった、として4走目の経路であれば最大のターン速度を出してゴールすることができなかった"かも"しれません。
今の段階では全て予想なのでどれが正解であったかはわかりませんが、記録を残すということは達成できたと思っています。
悔しい点は、用意してきた最大限の力は出せなかったという点です。ただ、用意してきた最大限の力を出したとて順位は変わらなかっただろう、というのも悔しいですね。
後者に関しては自分よりも成績が上の人たちに比べて準備不足でしたね。時間が取れず、用意してきたパラメータでは確実に勝てないし、そもそも速度を出せる制御じゃないし、良い経路も出せてないし、バグすら取り切れてなかったですしね。
でもこの悔しさは「勝負をする土俵に立ててない」ことへの悔しさなので大会の結果に対しての感情ではないですね。
吸引機構を動かせるようにしてそれに対応するパラメータを1つでも作ってこれたってだけでも十分偉いのですが、勝ちたいと思うからには仕方ないですね。
吸引機構動いたの2/4やぞ??10日くらいしか時間なかったからなぁ...
あれ、上出来では??
試走会まで
ここからは思い出タイムです。何してたを時系列で書いていきます。
試走会は例年昼からですので、夜行バス民の私は時間を潰す必要があります。
そこで、カフェで”いつもの”時間潰しが始まります。今回はかなりアホなのでスカートの張り替えをちゃちゃっとしました。注意された訳ではないのですが、ちょっと度が過ぎてると思うのでもうやらない。もちろん隣は居ませんし混んでない時間帯でしたよ。

秋葉原で秋月などの電子パーツ屋を巡り、時間を潰して浅草へ!!
3連休の昼の浅草は人がすごい!!!キャリーバッグ持って移動するの大変だった...


ということで、真っ先にキャリーバッグを宿に置きにいきました。
今回使用した宿は、仲見世通りからすぐの「旅館 三河屋本店」です。
よく使うビジネスホテルにしようと思っていたのですが、埋まっていたりそれなりにお値段がしてたのと、久しぶりに和室に入りたかったのでこちらに。
お部屋!

耳を澄ませば仲見世の賑わいが聞こえてきます。だって下これだもん。

騒がしいとは思いませんし、夜は静かなので安心してください。
お部屋を出てお昼ご飯を食べ歩きしながら会場に向かいます。
浅草ランチバトルを勝手に開始させました。
浅草メンチ
実は昨年も食べていたのですが、おいしかったので今年も食べにきました。
結構並んでいるように見えますがすぐに捌けます。本当に早いので350円を並んでいる間に用意しておきましょう。

囓ると肉汁があふれ出してきてすごくおいしいです。なんかちょっと罪悪感を感じます。1個をペロリといってしまうので今度は2個買おうか... いや...やばいか??
安心や
浅草メンチと近いこちらのお店ですが、こちらも結構お客さんが並んでいます。
でも10分も待たずに買えたような気がします。たぶんずっと揚げてるのだと思う...


期間限定なのか知りませんが、辛いVer.が売っていたのでそちらにしました。
肉は薄いのかなと思っていたのですが思っていたよりは厚く、ジューシーだったのでおいしかったです!意外とお腹にも溜まって満足。
この2つだけでお昼ご飯は終わりました。試走会の時間が近づいていたので...
有名所しかいけてないな。
浅草寺に参拝しておみくじも。去年は大吉だったような気がしますが、今回は凶でした。ちゃんと結んできたし吉に転じるように今年も誠実に生きましょう。

試走会~マウスパーティ
20分くらい遅刻して試走会に参加しにきたら、いるはずのない大学時代の後輩が居てビビりました。インターン終わりだったらしく帰る前に一目見ようと居たらしいです。
可愛いもんですね。
調整を行って迷路を走らせていたのですが、想像以上に調子が悪いことがわかりました。
大会中でも発現していたバグに加え、壁の読み間違いを起こしていました。迷路の一部分で調整を行っていたのですが、迷路の場所により結構差があったようです。この辺もしっかり対策できるようにならねばなぁ...
試走中も探索すら走りきれないことが多く、ものすごく不安でしたね。色々試したものの、バグは直せないし本番も発現するし... 本当にわからないんだよなぁ。
おやつとして揚げ団子の差し入れをいただいてありがたく食べました。ありがてぇ...

一応探索ができれば、このような形で動きました。
これ以上速く走れることはないので残念ですね。
明日はうまく動いてね……. pic.twitter.com/J5HFKjBKwL— N.Go. (@N_Go_mouse) 2024年2月17日
動画内でも叫んでますけど遅く見える... ターンはそれなりに早いけど直線の加速が足りないように感じます。加速度をもう少し上げても安定させるようにするのが次の課題ですかね。
ターンの調整に時間がかかりすぎるのでターン前後の調整を増やしたりもしてもう少し綺麗に走れるようにしたいですね。課題は挙げるとキリが無いくらいにはありますねぇ...
相性悪いと普通にこうだよ。助けて。 pic.twitter.com/C0TyljM9yI
— N.Go. (@N_Go_mouse) 2024年2月17日
マウスパーティー!久しぶり!!
ちょっと写真があんまりないですが... スポンサーの方々のお話があったり、色々お話できたりと楽しかったです~


出来るだけいろんな方にお喋りするようにしていたのですが、迷惑になってなければ良いなぁと思ってます... お酒入ってたので...
その後... 宿に直帰するのではなく、Pさんと2軒目にいってました。立食であんまり食べれてないやろ、とラーメン食べましたが、実はしっかり食べていたようで半分くらい食べてもらうというカスっぷりを見せてしまいました。申し訳ねぇ...

浅草 生田庵
つけ麺を食べましたが、おいしくてボリューム満点でとてもおいしかったです!!
次はちゃんとお腹すいている時にきて味わいたいです!!!!
ちなみに、ちゃんと宿には帰りましたが、X更新したら寝落ちしてました。シャワーも浴びずに... あがいて開発できるものはなかったので良かったですけど、最近そういうの多すぎる...
大会当日



浅草は朝と夜は人が少なくて最高なんですよ。天気も良いですし最高ですね。美しい。ちなみに夜はライトアップされてるのでこれもまた綺麗ですよ。(写真は2年前の)


朝ご飯はコーヒーショップ サニー へ。モーニングが食べられます!


ゆで卵とトーストとコーヒー!おいしかったです!
限定ケーキもいただきました!

クリームソーダにものすごく惹かれましたが、これは今度ですかね。
カレーなどのメニューもあるので昼ご飯の際にも使えると思います。
開場まで時間があったので、浅草寺付近の散策など...

金魚すくいができる店があって普通にびっくりしたよね。


(写真撮るのが下手くそ)
昼食はめちゃくちゃオシャレなカフェに連れて行ってもらう予定でしたが... 私がわがまま言ってある出走者まで見たせいで、待ち時間が長くなりすぎて予定変更を余儀なくされました... とても申し訳無い...
結局、もんじゃ焼きを食べました。とてもうまかったのでよかった!!!

つくしという店で前情報なしで入ったのですが、食べ終わった後に目の前を通った人力車のお兄さんが「ここおいしくてオススメです!」ってお客に紹介してたので知らぬ間に当たりを引いていたみたいです。ラッキー!

デザートとして、糀屋壽之介さんの甘酒を飲みました。良い甘さでおいしかったです!ごくごく飲んでた。
そうそう、今回はフォトスペースで写真を撮れたのです!良い感じに撮れますね!
そのうちアイコンこれに変えます。


自分のスマホで撮った迷路の写真です。とんでもない斜めがあって笑ってました。今回は無関係だったのでね。

マイクロマウスはほとんど見れなかったので残念でした...最後の方はみんな集まっててマウスなんて見えなかったし...背が低いし早めに陣取らないと見れないんだよなぁ。出場が後半だったのでそれも出来ませんでしたが。
今年も熱い戦いが生まれていたようでさすがです。

大会後の交流会!いろんな人と話せたかな?お話してくださったみなさんありがとうございました。私はまだまだ教える側ではなく学ぶ側なので頑張らないとですねぇ。
吸引機構を使うと爆音を鳴らしていることについて色々教えていただいたので、実践していきたいところです。改善点はいっぱいありますねぇ。
閉会式の出して良さそうな写真がないので、写真はありませんが受賞者の皆さんはおめでとうございます!関西勢の表彰も多くて嬉しい限りでした。自分も取れるように頑張らねば~~
全てが終わったあとに、またまたPさんに声かけて貰って今年からMiceOBのSさんと一緒に飲み会してました!
年齢や学歴で見ると結構差があるのですが、社会人1年目、2年目の新人メンバーにはなります。同じ世代として仲良くしていただけてるのが本当にありがたいです。嬉しい嬉しい。ほんとに。

想像通りというか、やっぱりというか、盛り上がってしまって私の夜行バスギリギリの時間までお話してました。とても楽しかった。なんか定刻通りに電車が出なかったりして、バス停までキャリーバッグ引きながら走ったりもしたけど間に合ったのでセーフ!! バス停に着いたら乗るバスが来てたの初めてやったわ... あぶねぇ...
まとめ
今回まだマシだと思うけど、長いよね... 正直日記だから全部見なくていいっすよ...
めちゃくちゃ遅くなりましたが、大会の準備、運営をしてくださった方々ありがとうございました!お疲れ様でした!
大会の結果としては微妙な結果にはなりましたが、皆と交流も楽しめた大会にできたと思います。

次大会は浅草から場所が変わり、東京流通センターとのことです!日程は2/22~23!
また参加できるように励んでいこうと思います。
カレンダーにもばっちり登録してますよ!!

ではまたみなさん!どこかでお会いしましょう!
それではまた~~~ ( ´・ω・` )ノシ
おまけ
はい、ここからは「大会前後は大変だったんだぞ!」と未来の自分に残しておくために愚痴をこぼしていきます。
まず大会1週間前にファンが砕け散りました。ファンがどうこうよりも吸引モータのマウンタが割れたのが原因です。モータの付け方が悪いんだと思います。
— N.Go. (@N_Go_mouse) 2024年2月10日
DMM.makeに即納の注文をしました。ついでに吸引モータもダメになってたので交換。
ここからは大会後の話。
2/19(月)
夜行バスと電車にて帰宅。有給を取っているのでゆっくりしたかったが、平日でないとできない用事があったため兵庫県へ。用事が終わり次第折り返して帰宅。ちなみに電車移動中は爆睡。次の日は大切な用事があり、いつもより早く起きる必要があるため19時頃に就寝。
2/20(火)
起きたのは目覚ましをかけていた6時。よく起きれた。大切は用事ってのは、他社へ赴くタイプの展示会の説明員。初めての説明員ということもあってめちゃくちゃ緊張して参加。とくにトラブルなしで終わったのでOK。
2/22(木)
水曜日と同じく通常のお仕事。とにかく疲れてはいた。
昼に入る前くらいから身体がむずむずして集中できなくなる。お昼休憩で確信。発熱してるわ。頭痛するし、寒気もする。まぁあとちょっとくらい頑張れるから定時で帰ろう。としてたけどちょっと残業して帰る。帰って熱計ったらこれ。ヤバい。
— N.Go. (@N_Go_mouse) 2024年2月22日
2/23(金・祝)
夜中に熱のピークが来て、最高39.5℃が出てた。人生初めて。意味不明な夢を見るなどして何回か起きてた。関節痛などはなく、インフルではない気がしていた。
祝日なのでどこも病院がやっておらず受診はなし。本当は3連休になるので実家に帰ろうと思っていたのに...動けねぇ...
2/24(土)
朝起きたら熱が結構下がっていた。発熱外来行ってもいいか悩んでたけど、午前中が過ぎてしまい受診不可に。せめてコロナかどうか確認したいと、検査キットを買おうと近くのドラッグストアを巡る。2店舗回ってもなくて、調剤薬局をやっている場所でないと置いてないことに気付く。3店舗目も回ったが丁度閉まった時間に入店したため購入できず。次に開くのは月曜日。
遅い時間までやっているドラッグストアを見つけて行ってみたが、移転されていた上に土曜日の調剤薬局の時間は短縮されていたようで購入できず。 運がない...
2/25(日)
病院は開いていないため土曜日の最後に行ったドラッグストアに再度訪れたが、在庫切れ... たしか雨の降ってる中でカッパ着て自転車で行ったので、メンタルケアの為にもお菓子などを購入し帰宅。
2/26(月)
熱は下がっていたが、コロナであると出勤するとまずいかもと思ってはいたが、会社にそういった規則はないため出社。全快でないことがわかる。しんどい。
帰宅時に土曜日の3店舗目にいったドラッグストアでやっと検査キットを購入。
発熱を0日目として3日目での検査のためよくわからんが、恐らくコロナでないことが判明。近くで発熱してる人も居ないし。

(Tにラインが入ったら陽性らしい。うっすら見える???)
それからは回復していきましたが、やる気を労働で使い切る日が続き、大会で使ったものの片付け、家で展開したままの迷路を片付けれたのが3/10(大会から3週間後)。
以上、これが疲労が溜まりすぎて熱出した奴の話でした。
みんなは疲労溜めすぎたらいけないよ!!!適度に休むんだよ!!
やる気が出るまで待ってたらブログを書き終わるのが2ヶ月も後になった者より
ここまで読んでくれた方がいたのなら、本当にありがとうございます。
大会情報も色々でてきたのでそろそろほんとに手をつけないと...がんばろ。
それでは本当にばいばい~ ( ´・ω・` )ノシ (7800↑)
みなさんお疲れ様~~~!!
初めましての人は初めまして。
そうでない人は疲れてないかい?
進捗がまるで出てこないN_Goです!
この記事は「マイクロマウスアドベントカレンダー2023」の16日目の記事です。
昨日はtutuiさんによる「ロボトレ機体を1週間で作らされた話」でした。
B2なのに1週間で作れるのはやべぇっすね。入りたてで自作作らせるとやっぱり強くなるもんなんですね...(reRoの方針を詳しくは知らないですが)
個人的にreRoの急成長はすごいと思っていますし、団体の運営について意見を交わしたいと1年前から思ってますね...(実行に移せ)
え~~~、ここから本文ですが、まず謝罪します。掲載が遅れたことが1つ、そして今回はこの内容にしようとは思ってなかったことについてです。すみませんでした...
本当は「新作の吸引ファンを回すことができたよ!!こうやったよ!!」って言いたかった。が、上手くいってないので上手くいったら記事にします。ここで約束しておきます。
ということで、前置きが長くなりました。今回は私の初自作マウス「とことこねずみ」について詳細を書いていこうと思います。学生大会後ではありますし、そろそろ自作マウスに手を出そうとしている学生さんもいるのではないでしょうか?
この記事は初めて自作マウスを作る方向けのつもりです!!!
私が工夫したところ、考えたところ、苦労したところ、私の持つ情報全て書こうと思います。これがいいのかどうかわかりませんが、こういう記事が1つはあってもいいでしょう。ちなみに、間違ってる情報もあるかもしれないのでそこはご了承ください。
連絡いただければ随時更新もしていきます。永久保存版!ブクマしときましょう!
わからない用語はこれなど見て理解してくだい。
それではいってみよ~~!
- 0. 概要と目的
- 1. 基本情報
- 2. 使用部品(回路)
- 3. 回路図
- 4. パターン図
- 5. ハード関連
- 6. 基板作成
- 7. プログラム
- 8. 回路の事前確認のすすめ
- 9. その他
- まとめ
- さいごに
(かーーーーーなり長いから気をつけてね。)
0. 概要と目的
とことこねずみを作る上で大きく立てたコンセプトがあります。それは、
初めての自作マウス です。
意味としては、難しいことを一気にやらないってことです。自作マウスを作るというハードルは正直ものすごく高いです。それはやる前からもみんなわかると思います。
なので、少しでもそのハードルを下げて、まずは完成して動くモノを作るということを最優先しました。
私としては、まず動くものを作って、ノウハウと作れた自信を持って次へ行きたい想いが強かったのでこのコンセプトになりました。
いきなり全てをやって速さを求めるのも良いと思います。ただ、周りに聞ける人がいるとかそういった環境でないとつらさがとんでもないです。
回り道なように見えて実は近道かも?堅実を地で行くタイプの人にオススメです。
1. 基本情報

名前:とことこねずみ
長さ:90mm
幅 :75mm
高さ:35mm
重さ:124g
実績:2022年全日本大会 6位
2023年関西大会 5位
いい感じに走れればこんな感じにはなる。
おらぁ!!! pic.twitter.com/plv1nRy9We
— N.Go. (@N_Go_mouse) 2023年2月14日
2. 使用部品(回路)
回路部分で主要なパーツを並べときます。全ての部品におけるのですが、入手性を重視して購入していたつもりです。ただ、品切れになってしまってる商品もあります...ごめんなさい... 代替え品も示していきます。
| パーツ名 | 商品名 | メーカー | 購入場所 | コメント |
|---|---|---|---|---|
| CPU | RX631搭載CPUボード | (Renesas) | RTロボットショップ | |
| モータ | 1717T006SR-IEH2-512 | FAULHABER | 新光電子株式会社 | 学生割引アリ |
| モータドライバ | TB6612FNG | 東芝 | 秋月電子通商 | |
| ジャイロセンサ | MPU-9250 ボード | (InvenSense) | Strawberry Linux | 品切れ中 |
| フォトトランジスタ | ST-1KL3A | コーデンシ | RTロボットショップ | 壁センサ用 |
| 赤外線LED | SFH 4550 | OSRAM | RSコンポーネンツ | 壁センサ用 |
| バッテリー | Hyperion G8 HV 30-60C放電 330mAh 2S (7.6V) | Hyperion | ロビン | 品切れ中 |
| 3端子レギュレータ | NJM7805SDL1 | 秋月電子通商 | 5V 1.5A | |
| 3端子レギュレータ | ADP3338AKC-3.3 | 秋月電子通商 | 3.3V 1A | |
| ダイナミックスピーカ | UGCM0603APE | 秋月電子通商 | ||
| MOSFET | BSS138 | 秋月電子通商 | ||
| 赤色7セグLED | OSL10326-IR | 秋月電子通商 |
これ以外のパーツは秋月や千石電商(抵抗系のみ)とかで買ってます。
抵抗とコンデンサのサイズは手付けもしやすいように2012サイズにしてます。
部品を見て感じたかもしれませんが、CPUとジャイロセンサはボードを使用しています。これは、はんだ付け不良の不安をできるだけ減らすための工夫です。
モノが上手く動かなかった場合にはんだ付け不良の可能性を除外することができるのは大きいですよ... ほんとに...
部品ごとに少しだけ紹介していきます。
・RX631搭載CPUボード Pi:Co Classic3で使用されているCPUボードです。ボードなのでCPU周りの回路、水晶振動子等を考えなくても、電源入れれば動きます。また、USBで書き込み、通信ができるのでその辺も考えないで済むので良いです。後述しますが、RX631自体に罠が多いかつピンアサインがギリギリなので注意することも多いです。
(2024/07/22追記) なんとこちらが販売停止になってしまったようです...残念です。
なので、丸パクリはできなくなってしまいました。RX631が流通しなくなったことが原因のようです。
後継としてESP32の載ったマイコンボードがあるし、それのサンプルプログラムもあるようなので、そちらで互換性持たせることができるか試してみますね。モノにできたらこちらに更新します。
・1717T006SR-IEH2-512
マウス界隈では言わずと知れたモータです。磁気式エンコーダ付きなためこれも設計的にかなり楽が出来ます。
1717T006SRまでがモータの型番です。定格6Vのものですが、3Vのものの方が特性が良いようなのでそちらを使われる方が多いです。IEH2-512はエンコーダの型番です。軸が1回転で512パルス出ます。最高は4096なのですが、分解能はあるだけ良いということで大きい値を買う人が多いです。512でも十分ではあります。
RTロボットショップで買うこともできますが、学生であればアカデミックキャンペーンを使用して代理店から買うことも可能です。お問い合わせから「アカデミックチャレンジを使用して見積もりお願いします」と言えばメールで返信が来ます。エンコーダまで含めた同品番を6個くらい買うと単価が下がるので学生団体でまとめて買うとお得なはずです。 (私が最後買ったときは物価高の影響でRTの方が安かったこともありました... 買いましたが...)
・TB6612FNG (モータドライバ)
1717モータに合わせるモータドライバとして有名です。1つ乗せるだけで2つのモータ制御できるので楽です。それなりに電流も流せるし、電源の余裕もあります。
・MPU-9250 ボード
ジャイロセンサのボードです。Strawberry Linuxで買えます。が、売り切れてしまったようです。そもそもMPUシリーズが新規設計非推奨ですので仕方ないです。
しかし!!見つけてしまった!!!MPU-9250の後継機種であるICM-20948のボードが出てました!!!これです!! MPUシリーズとはアドレスが違う等はありますが、ピン配置は同じなので注意すれば使えると思います。
(2024/07/22修正) ICM-20948は1.8V駆動で、3.3Vでの使用が出来ませんでした。データシートをあまり見ておらずすみません。代わりにと言ってはなんですが、ICM-42688を見つけました。こちらで動作することも確認しましたのでこちらを使用ください。
(後輩たちに被害を負わせました。すまん。)
ボードなら、このサイズが一番小さいと思うので良きです。
サイズ等は違いますが、別のボードでMPU6050というものがありますがこちらはI2C通信のみなので注意が必要です。断言できるほどしっかり見てないですが、RTのCPUボードではI2Cは使えないです。とことこねずみではSPI通信を想定しているので同じ構成にするのであれば避けてください。
・壁センサ (SFH4550,ST-1KL3A)
赤外線LEDを使ってフォトトランジスタで読みます。クラシックマウスではこのフォトトランジスタ(ST-1KL3A)が定番で使われています。赤色から赤外線の波長に対応しているので赤外線LEDでなくても使えます。RTロボットショップくらいでしか買えないですが、ランクを絞っている品らしいので特性が良いです。
赤外線LEDはなんでもいいとは思いますが、良く見る品番はこれな気がします。
後述するとは思いますが、SFH4550は極性を間違えやすいので注意しましょう。赤外線なので光っているかどうかの判断が肉眼ではほぼできないので気付きにくいです。
・Hyperion G8 HV 30-60C放電 330mAh 2S (7.6V)
ちょっと特殊なバッテリーを使っています。Hyperionから出ているHV Li-Po (ハイボルト リポ)というものです。普通のLiPoは1cel 3.7Vですが、HV Li-Poは1cell 3.8Vになります。なので少しだけ電圧が高くなります。電圧=パワーだと思ってるので選定しただけです。今では希少なようなので普通のLipo 2cellでいいと思います。2個買っておくと充電で待ちの時間がなくなるので楽です。
知ってるとは思いますがLipoバッテリーは取り扱いに気をつけないと危険ですので、しっかりと管理して保管、使用しましょう。
3. 回路図
とことこねずみの回路図をそのまま公開します。動いてはいることは実証済みですが、もしかしたらよくない回路もあるかもしれないです。自己責任でお願いします。

ちょこちょことコメントいれていきますね。
回路CADはKi-CADを使用しています。
CPU周り

ここはボードを使っているので回路的には楽です。ただ、ピンアサインを間違えるとどうしようもなくなるので気を付けましょう。RTのボードを使うのであれば、ボードの説明書とRX631のハードウェアマニュアルのどちらもしっかりみましょう。ここはめんどくさいですが、しっかり理解しながらやったほうがいいです。一番めんどくさいけど、本当に、これはマジ。
以下が使用しているピンアサインです。IOピンは省いてます。
| 機能名 | 使用ポート | 機能モード | ピン名 | RT-RX631ボード上のピン番号 |
|---|---|---|---|---|
| 右モータPWM | MTIOC4C | PWMモード1 | PE2 | J4-15 |
| 左モータPWM | MTIOC3C | PWMモード1 | PC6 | J4-13 |
| ブザーPWM | MTIOC0A | PWMモード1 | PB3 | J4-9 |
| 右エンコーダ読込 | TCLKA | 位相計数モード1 | P15 | J5-4 |
| TCLKB | 位相計数モード1 | PC2 | J5-1 | |
| 左エンコーダ読込 | MTCLKC | 位相計数モード1 | PC4 | J4-14 |
| MTCLKD | 位相計数モード1 | PC5 | J4-12 | |
| ジャイロセンサ用SPI通信 | RSPCKB | ー | P27 | J5-21 |
| MISOB | ー | P30 | J5-16 | |
| MOSIB | ー | P26 | J5-17 | |
| SSLB0 | ー | P31 | J5-3 | |
| バッテリー監視用AD変換 | AN008 | 12ビットA/D変換 | PE0 | J4-21 |
| センサ用AD変換 | AN002 | 12ビットA/D変換 | P42 | J4-25 |
| AN004 | 12ビットA/D変換 | P44 | J4-23 | |
| AN006 | 12ビットA/D変換 | P46 | J4-24 | |
| AN009 | 12ビットA/D変換 | PE1 | J4-22 |
このボードを使ってDCマウスを作ろうとすると、このピンアサインにしかならないと思ってます。それくらいギリギリです。いまいちわからん人は素直に従うと良いでしょう……
気を付けるべき箇所は、色文字の箇所です。特にエンコーダは2重に注意がいります。
・MTU2a機能周辺(PWM出すところ) PWMモード1を使うときは出る端子が限られます。例えば... MTIOC4BやMTIOC4DからはPWMを出力することができません。いくら設定しても出ないものは出ません。これは気付かずにやってたら泣きますよ。ほんとに。ちなみにTPUでも同じ。(経験者)
PWMモード2は周期を変更できないので使うなら気を付けましょう。
RX63Nグループ、RX631グループ ユーザーズマニュアル ハードウェア編

・位相係数モードについて
MTUやTPUの機能の一つなので"MTIOC1A"などと設定したくなりますが、ダメです。位相係数モードは外部のクロック、パルスを数えるための機能です。なので”外部入力端子”を使わないといけないのです。それがMTCLKCなどです。PWMが出せたからと満足してたら足元すくわれます。本当にビビる(経験者)
RX63Nグループ、RX631グループ ユーザーズマニュアル ハードウェア編

・5Vトレラント端子について
RX631には5Vトレラント端子が用意されています。入力電圧が5Vでも大丈夫な端子となります。RX631の電源は3.3Vなので5V入力をすると普通は壊れます。
エンコーダの出力は5Vのパルスとなります。なので5Vトレラント端子で受けるのが理想です。今回の構成では端子が足りなくて右エンコーダの出力のみ5Vトレラント端子で受けています。左側をどうしているかは後述します。
マニュアルの "21.IOポート"の一覧を見たら対応端子がわかります。
・RT-RX631ボード都合で使用不可なポート
リストにはない項目ですが、CPUボードの都合で使用できない端子が存在します。
RT-RX631 CPU ボード 簡易マニュアル P.4

"マイコンに詳しい方"ってのはこれを外すとどうなるのかわかる人って意味だと思ってます。わからん人は絶対触らない方がいいです。これはさすがに触らんかった。
電源部分

CPUやIC系に3.3V、エンコーダに5Vが必要なので2電源を作成します。私は3端子レギュレータ(リニアレギュレータ)を使用しています。
接続はデータシートの推奨回路図のまま使ってます。(C6はめんどくさくて1uFを実装していました。図と違いますね。ごめんなさい。)
難点としては、3端子レギュレータなので電圧を熱に変換してます。8.6Vから5Vへ落としてるのでかなり発熱します。触ったら火傷しそうなレベルです。この回路ではそうなるのは間違ってないので心配にはなりますが、正常です。(たぶん)
それと、別素子を使う場合はバッテリー→5Vで流せる電流が低いと、5V→3.3Vの素子がいくら電流が流せようと頭打ち喰らうor壊れるので気を付けましょう。
スイッチ部分に+BATTがあり、その先にVCCがありますね。このようにしましょう。エラーが出るからと+BATTでも繋ごうもんならスイッチの意味が成さなくなります。危険です。(経験者) 意図的にパターン図で接続しない、という対策をとれば免れますが、エレクトリカル ルールチェックには怒られます。そりゃそう。VCCはスイッチを通ったあとのバッテリー電圧と捉えてください。
バッテリー電圧監視回路

バッテリーの電圧を分圧してA/D変換ポートに入れてるだけの回路ですが、LiPoバッテリーを使うならこれは確実に入れましょう。バッテリーの電圧管理ができてないと危険ですし、電圧が下がりすぎてバッテリーが使えなくなることもあるので入れて使用できるようにしておきましょう。
エンコーダー (モータのコネクタ)


上で少し言いましたが、ポートの関係上、5Ⅴトレラント対応の入力ポートが足りません。本当のところを言えば3.3V対応のところに5V入力を入れても大丈夫だとは思います。が、一応3.3Vの信号にするためにレベルシフトをしています。抵抗の分圧だと波形が鈍るといやなのでMOSFETで。秋月で売ってあるレベルシフタの回路図をパクったので間違ってないはず。
1717モータのコネクタですが、これまた特殊なので気を付けましょう。ピン番号と向きを間違えないようにデータシートとにらめっこしましょう。
たまに、エンコーダ付きの寸法がわからんっていう人がいますが、エンコーダのデータシートに寸法もコネクタ形状も書いてあるのでチェックしましょうね。
スピーカー(ブザー)

別に言うことはない。ここを見て真似たのみ。使用しているスピーカーはかなり小さいサイズだと思っています。
ジャイロボード

これもボードなので特に言うことはないMOSIにはSDIかな?SDOかな?ってのを回路図上間違えなければ大丈夫です。意味が分からん人は調べて。
モータードライバー

データシートの推奨接続通りの回路にしてます。が、C2,C3は電解コンデンサではなく普通のチップコンデンサ使っています。本当は10μFだったのですが、コンデンサのDCバイアス特性を見ると8.6Vかけると容量が半減していました。なので22μFを使用して半減して良い感じになるようにつけています。これだけ3225のコンデンサ使ってます。
壁センサ回路

この回路はS木先生がある大学の標準機として使っている回路です。元々はLEDが3つですが、4つに増やして使っています。I/Oピン一つでLEDを全部を付けることができるのでピンの節約になります。LEDの光量がばらつくことが懸念されますが、抵抗などを変更することで対応することも可能ではある...はずです。自信はない。
表示LED

回路にいうことは特にないです。D1は電源確認用、D2はバッテリーの電圧監視専用みたいな感じで分けてはいます。
抵抗の値などは一度計算してみてください。この値だったか覚えてない。
その際に気を付けることとして、RX631はI/Oピンから出せる電流が1.2mAまでです。しかも2.7V出力なので、光らない色のLEDも出てきます。できれば事前に確認するなどができればいいですね...
7セグLED

つけてみたかっただけ。以上。これ結構小さいサイズなので良いですよ。
つける必要はありません、が、視認性向上にはとてもいいです。
ピンが足りなくてドットは使えませんが...
こいつのフットプリントをミスって敗北してるので気を付けましょう。
スイッチ回路

特になにもない。同じ型番を使うと基板に穴をあける必要があるので、ちゃんとしたフットプリントを取ってきましょう。自分で作ったらミスると思う...
あとはスイッチなので、基板に配置するときに押すことを意識した配置にしましょう。
番外編:PCとの接続部分
PCとの接続ですが、RT-RX631ボードで完結しているので考える必要がありません。
ただ、USBでの接続になります。RX631にはUSBとの接続をする機能があり、それを使っています。大体のマウサーはUART通信をしているのでごっちゃにならないようにしましょう。またプログラム部分で後述します。
4. パターン図
全部

表配線と裏配線


正直、部品を置いた時点でカツカツだったのでどうにかしたって感じが強いです。ベタGNDはしてません。
一応注意したのは、3端子レギュレータの場所とかでしょうか。放熱対策で中には配置しませんでした。スイッチとかとも離すことでやけどしにくいようにという程度ですが。ジャイロセンサもできるだけ中央かつ車軸上に置くようにしています。
2輪なので基板のどこかが接地します。なので裏に部品は置かないようにしています。車軸あたりなら地面がつくことなどほぼないので、裏に回してもいいと思います。
引き方にコツなどがあれば私が教えてほしいくらいですが、聞いたことあるのは書いておこうと思います。
・モータ系のGNDと信号系のGNDは混ぜない方がよい
モータなどはノイズが乗りやすいため同じにしないことが大切です。センサ系のGNDにノイズが混じられると計測どころではなくなるので意識してみましょう。
一点接地といってノイズが発生しやすいGNDをそれ以外のGNDと繋がる部分を一点にします。ベタをするときも同じです。
明るく見えてるのがGND線、2枚目図の真ん中あたりのビアで集めてたつもり。
左側のコネクタのスルーホールでもきっぱり分かれてる(はず)


・表と裏で縦に引くか横に引くかを決めて配線する
一応、裏面を縦に、表面を横に引くように意識はしています。基板の下側はどうしようもなかったので無法地帯みたいになってますね。
意識して行うだけでも引きやすくはなるのでお勧めです。
・電源やGNDを外周引いてから配線を行うやり方
別にあんまり意識してやってはなかったですが、上側は外周に回してます。こうするほうが繋ぎやすくなる場合もあるみたいです。
明るい線は3.3V線です。

・電流が流れる配線はできるだけ太くする
1A流すなら1mmはいるとか言われますよね。詳しくは調べてください。
私は取れるだけ太くしたつもりです。
こんなもんでしょうか。レイアウトに関しては自分で調べてやってみてください。
オートルーティングも使うことができ、自動配線を行うことができます。ただ、この基板では複雑すぎて無理でした... 人間が手を加えたりしたらできないことはないのですが、それをやるよりかは自分で引きましたね。パズル解いてるみたいで楽しいですし。
外形や素子の位置決めはFusion360で設計してDXFデータを読み込んでます。円弧などがうまく読み込めない場合があるらしいですが、対処方はあったと思います。
文字をDXFデータにして持ってくればこんな感じで遊べます。確かKi-CAD上でイラストをシルクにすることとかもできた気がします。やりたかったら調べてみてください。

5. ハード関連
ハード面はギアなどを既製品とすることで信頼性を高めようとして作りました。
2輪にした理由としては、素直に(ほぼ理論通りに)動いてくれると思ったからです。4輪にするとタイヤの接地面積が多くなるので直進性能等がよくなりますが、超信地旋回時の挙動が安定しない(予想できない)ようです。無理やり回ってるらしいので仕方ないですね。
初めてのDCマウスでしたし、超信地旋回を使用しての探索走行も考えていたので基本に忠実に2輪です。設計も余裕があって少しは簡単になりますしね。
3Dデータ
CADはこんな感じに簡単にしか作ってないです。(作り方を知らない)

一応CADデータも置いておきますね。(使ってみたかっただけ)
モータマウンタとセンサホルダーは3Dプリンタで作っています。ABSで作ったのですが、穴が潰れたりしてしまったところもあったので追加工などをして使えるようにしています。なのでデータそのままで作ると工作精度により不都合が出ると思います。
自分で設計しましょうね。


モータマウンタの取り付けはナットを埋め込んでネジで締めます。
当初は基板に位置決め用の穴をあけ、刺すようにして接着しようとしていたのですが、「取りたくなることがあるよ」と助言をいただいたので取り付けできるようにしました。変更したことはありませんでしたが、メンテナンス時を考えると取れた方がいいのでオススメします。この形状なら簡単に作れますので。
センサーホルダーは四角形の柱を刺すことで向きを固定できるようにしています。
センサの向きについて
これは人によってかなり違うかと思います。が、あれは基本的に意図があってやっているものと思いましょう。
とことこねずみの構成はド定番の配置で、結局みなこれに収束すると言われています。

前を見ている2つのセンサは、斜め走行をする時に威力を発揮します。柱を避けるようにする制御を作る事ができます。また、前壁を見たときの傾き補正にも使えたりします。
前向きのセンサや横向きのセンサの角度は機体の大きさなどによって変化すると思います。横壁を見るセンサは前提として壁が見れないとダメです。ただ、壁切れ制御などにも使いたいです。「マウスがどの地点で壁を読み、壁切れ制御を使うならどの位置で壁が切れて欲しいか」という所が角度を決めるポイントになり、それがセンサの数や配置に発展していきます。
制御のことや斜め走行のことは遠くて考えられないといった人は、とりあえずこの配置にして、迷路の真ん中に置いた時に壁が見えるかどうかギリギリ位の角度がいいと思います。(責任はとりません) その域になった時にもう一度考えてみてください。
写真のようにセンサからビームみたいな感じにしてCAD上で確認したらよいですが、厳密に考えるなら光線は広がっていくので正しい絵ではありません。
足回りについて
足回りというか、ホイールとモータマウンタを繋ぐ所のことですが、構成はこのブログを参考。
ほぼパクリでやっています。既製品でできるのでとてもいいです。
使用した部品をリストにします。
| パーツ名 | 商品名 | メーカー | 購入場所 | コメント |
|---|---|---|---|---|
| ホイール | MZH131W-N25 | 京商 | スーパーラジコン | オフセット2.5mm |
| タイヤ | MZW2-30 | 京商 | スーパーラジコン | 堅さ30° |
| ベアリング | SBR-F630-4 内3mm*外6mm*厚さ2.5mm | SQUARE | スーパーラジコン | 4つ入 |
| 車軸 | R31M063RD ジュラルミンヘックスビス M3 18mm 赤 | SHIBATA | スーパーラジコン | |
| スペーサー | スペーサ 3*4*2.5 50個入 | 大陽ステンレススプリング | モノタロウ | |
| シム | タミヤ Φ3mm シムセット | タミヤ | Joshin | 0.1mmのみ使用 |
| スパーギア | 平ギア モジュール0.5 40歯 Φ8 歯幅2mm | 協育歯車工業 | モノタロウ/デジット | |
| ピニオンギア | 樹脂ピニオンギア モジュール0.5 8歯Φ1.5 | デジット | ||
| ナット | SGE-03UR アイロンナット M3 赤 | SQUARE | スーパーラジコン | |
| 調整用スペーサー | R31M075RDB 厚さ1.5mmM3用スペーサー 赤 | SHIBATA | スーパーラジコン | |
| ネジ | M1.6ネジ | 鍋屋バイテック(NBK) | モノタロウ | モータ固定用 |
足回りのほとんどを大阪の日本橋で購入したので入手性が不安でしたが、ほとんどネットでも買えそうですね。すごい。
スーパーラジコンは秋葉原にもあるのでそちらの店舗でもいいと思います。LiPoとかも売っています。
足回りのブログに書いてある、ベアリングの間の軸受けスペーサですが貼ってある2.5mmのものが良かったです。軸受けの大切さは誰かに任せます。
へんなスペーサがあったと思いますが、ここでつかっています。

ほぼ設計ミスみたいなものです。スペーサを入れて空間を空けないとタイヤとピニオンギア、モータシャフトが干渉します。なのでちゃんと設計したらいらないはずです。
ギアのモジュールは0.5です。歯数はピニオン8のスパーギア40でギヤ比1:5です。
本当は割り切れない値の方が良いらしいですが、40しかなかったのよ...
購入時は店舗にある歯数40ギアを買い占めてしまい、それから入荷もされていなかったので代替品を調べようとしたところ、同じ物がモノタロウで買えました!!しかも歯数も選べる!!!気付かなかった!!!ちなみに、歯数45にするとホイールよりも大きくなるので気をつけてください。(経験者)
モジュールは0.3を使っている方が多いですが、クラシックマウスでは0.5で十分だと思います。既製品の数もM0.3に比べて多いはずです。ミニ四駆のギアもM0.5だと聞いたことがあります。
スパーギアは始めPOMをCNCで削り出して作ろうとしましたが、失敗したのでやめました。こちらのブログを参考にしてました。
スパーギアの接着には以下の物を使いました。接着剤は3滴くらいしか付けてないのに一瞬でガチガチになったので本当に驚きました。
— N.Go. (@N_Go_mouse) 2022年5月13日
ピニオンギアについてですが、選んでいるのは樹脂ギアなので圧入で固定します。
金属のピニオンギアを考えている人に忠告です。圧入するのは危険です!!
同期が1717モータをおしゃかにしました。エンコーダ付きの1717モータは軸が出てないのでバイス使うと壊れます。樹脂ギアだと手の力で入るので耐えるみたいです。(よくはないです。) 意見を色々いただいたので詳しくはリプ欄をご覧ください。
— N.Go. (@N_Go_mouse) 2022年1月25日
kkpmoのシャフトよりも径の少し大きいピニオンギアき、糸圧入+ロックタイト243で固定してる。 https://t.co/4dmH2257if
— そら (@sora_siro1) 2022年1月26日
(モーター壊した当事者)
なげーよ!!ww
でも、参考にはなります。
初めて自作マウス作る方必見の内容です(特に自由工房の人はこれをパクりましょう)。
ちなみに僕も、モータ周りの回路はこの人の回路をパクリました。
後、モータを圧入する時は気をつけましょう。てか、圧入せず、ロックタイトなどで固定した方がいいです。 https://t.co/55djmPrBP8— タケぽんぬ (@mouse_ponnnu) 2023年12月18日
バッテリー置き場について
この設計データではバッテリーの置く場所を考えてません。考えられなかったというのが正しいかもしれません。置くところが無かった。
作り終わりの際はちょうどモータのコードが余っていて良い感じに固定されるので1枚目の感じでしたが、しっかり固定出来ていないのと後ろ重心による直進安定性の影響が出たので2枚目になりました。CPUボードの上にマジックテープを貼って固定しただけの手抜きになってしまいました。
できるなら設計段階から考えておくべきです。2輪ですし重心がタイヤの接地点になるようにするのが理想です。ボードを使うとサイズ的に余裕がないので難しいとは思います。
6. 基板作成
私はとことこねずみでは2回基板を出しています。1回目はALLPCB、2回目はJLCPCBです。ALLPCBは送料込みで無料キャンペーンをしていた時に頼みました。色々ミスってたのでダメでしたが... JLCPCBはクーポンがあったので使ってみました。新規の方はこちらから登録することで貰えるらしいのでどうぞ。クーポンなくてもかなり安いので結構使っています。
1枚目がALLPCB、2枚目がJLCPCB。レジスト色とシルクの感じがちょっと違います。
私はJLCPCBの方が好み。


注文方法は簡単。基板設計を終えてガーバーファイル形式で出力、基板メーカのページにガーバーファイルをアップロード。必要箇所を埋めて輸送方法を決めて支払って終了。とても楽です。参考に私の注文の詳細を載せておきます。意味は私もよくわからんところがあるので各自調べてください。

そして、はんだ付けを楽にしようとステンシルも作りました。
ステンシルは先輩の発注に重ねたのでPCBGOGOで作りました。縁付きを選ぶとこんな形で来る様です。大きさは最小サイズだったと思います。作る場所により最小サイズの規定が違うと思うのでその点でも選ぶと良いと思います。ちなみにステンシルだけの発注はできないので基板作るタイミングでやりましょう。


正直そんなに安くないし、数作らないのでいらんと思います。ステンシルがいるほど難しいはんだ付けがそもそもないです。やろうと思ったらペーストはんだの手のせもできます(苦行)。
付ける際にホットプレートなども必要です。通常売られているものは温度調節されるので200℃付近まで上がりません。なので改造するなどが必要かも... 改造しなくてもできるものかもしれませんが、一度リフローで使ったホットプレートを食事で使ってはダメですよ... やめましょうね。小型リフロー機などもあると思うのでそちらがいいかと思います。

ステンシルについて有力情報
ステンシルはpcbgogoだとかなりでかいので、Elecrowかfusionpcbがおすすめです
— hmsn (@hmsn_sts_mat_si) 2023年12月18日
基板発注前は確認するのが大切です。意外とミスしてます。
今日は回路の確認してました!
やっぱりちゃんと線なぞりながら見るべきですね… 3、4箇所は修正しました。これでもどこかミスをしているんだろうなぁ…
はやけりゃ明日にでも出したいけど…3日程おいたほうがいいと聞く。僕もそう思うが… 時間がなぁ… pic.twitter.com/GxAQ5CcAV4— N.Go. (@N_Go_mouse) 2021年10月21日
リフロー工程のめちゃくちゃわかりやすい動画です。ステンシルの塗る所など参考にしてください。
プリント基板にクリームはんだをメタルマスクから塗り、チップマウンタで部品を実装してホットプレートでリフローする動画 0603mがきつかった。
How to use solder paste for building Micromouse PCB クリームはんだによるマイクロマウス基板組み立て https://t.co/rXiN5luTGp @YouTubeより
— hidejr1053 (@hidejr1053) 2023年12月19日
7. プログラム
なぜRT-RX631ボードを使ったかはプログラム面が大きいです。Pi:CoとHM-StarterKitのプログラムをそのまま使えるからです!!!HM-StarterKitはDCマウスなので、DCモータの制御関連や、ジャイロセンサの制御関連が書かれています!!強い!!!
これらが使えることが大きなメリットです。ちなみに、これらを使えないのであればRX631はやめときましょう。設定がめちゃくちゃ難しいです。1つレジスタを間違えてるだけで動かない等は良くあります。しかもエラー文は出ないし、なにが間違っているかわからない。完全な闇に放り出された気分になります。
ちなみに、サンプルプログラムがあるとは言え、変更点はあります。答えの1つを持っているにも関わらず同じ闇を見ることがあります。なんなら見ます。泣きそうになりますよ。(経験談)
私の動作確認が終わったプログラムを見れるようにするべきかとは思いますが、この場では考えてないです。一応RTさんのものですしね。ただ、どうしようもなく困って闇から抜けられません。と言う方は連絡ください。できる限りお助けします。
動かない原因はプログラムの問題だけでなく、回路であったりはんだ不良であったり色々あります。ボードを使うことでCPU周りの動作とはんだ不良の心配が無くなるのはかなり助かると思います。
RTのサンプルプログラムについて
Pi:CoとHM-StarterKitのプログラムですが、どちらか片方を使用するというよりもどちらもミックスしています。
似ている様で結構違うプログラムなので考えずに統合するとエラーがすごいことになります。
一応表にしてみます。
| 動作 | 使用プログラム |
|---|---|
| 通信関連、ファイル全体 | Pi:Co |
| マイコンの設定 | 基本HM-StarterKit |
| 割り込み制御関連 | HM-StarterKit |
| 動作関数系(run.c等) | HM-StarterKit |
ほぼHM-StarterKitにはなります。言うなればRT-RX631のボードに関する部分とブザーで音色を奏でる以外はHM-StarterKitです。
上でも書きましたが、このボードはUSBを使って通信をします。HM-StarterKitも最終的にはUSBなのですが通信方法が違います。HM-StarterKitはUARTといわれるシリアル通信をしています。マイコンの機能としてはSCIを使っています。Pi:CoはUSB専用の通信方法を使っています。データの送り方が違うのです。詳しくはしらんが。
なのでそれさえ合わせればHM-StarterKitで構いません。(もしかしたらサンプルプログラムがRenesas公式から出ているかもしれません。)
モータの動かし方、制御の仕方はDCとステッピングモータでは全然違うのでステッパーからDCへ上がる人は頑張りましょう。
もし動けば、HM-StarterKitのブログなどが役に立つと思います。RTさんありがとう。
8. 回路の事前確認のすすめ
とことこねずみを作るにおいて2回基板を作っています。1回目と2回目の間にこの回路の確認、実験を挟みました。できればこれは始めにやるべきです。でなければピンアサインが確定できないです。
単純にブレッドボードを使って機能単位で動作するかの確認をします。CPUボードであれば可能なのです。
確認したのは、CPUとの会話、LED回路、ブザー、ジャイロセンサ、エンコーダ、モーターPWM、です。全部やん...
・LED回路
カメラを通すとこんな感じで赤外線でも光っているかの確認ができます。
ここで極性が逆だったことがわかりました。よくデータシートは確認しましょう。

昨日はLEDを4つに増やしてのテストをしてました!
ちゃんと動いてるしこれでええやろ!!!
回路完成です!!! pic.twitter.com/IaDpq8lIkN— N.Go. (@N_Go_mouse) 2021年9月21日
・ジャイロセンサ

— N.Go. (@N_Go_mouse) 2022年3月29日
・エンコーダとモータ


TB6612のボードなども秋月で売っているのでブレッドボードでモータの確認もできます。
はい、今日はこんな感じです。
エンコーダの値をいい感じに取れてるのではないでしょうか?これまで出てた、値がマイナスに下がりまくる現象は、5Vと3.3VのGNDを合わせて無かったからでした。
しょうもないミスですね。しかも自分で気付けなかった… 外部の影響だと気付くまではできたけども… pic.twitter.com/vKPJBpfUHt
— N.Go. (@N_Go_mouse) 2022年4月11日
したいように回せたのでOKでしょう!
出力上げながら逆回し、を3回やったらとまります。
何回もやってると値が飛んでるいるのか、時間がかかったりするのでちょっと不安ではある。
モーターの回転早いなぁ…… pic.twitter.com/pW8JaFTOyP— N.Go. (@N_Go_mouse) 2022年5月1日
このように確認することができるのでやるべきではありますが、写真を見てわかるようにいろんな機器が必要です。できれば学生のうちに、学校の備品を使って済ませておきましょう。この経験はかなり大切になります。
最低でも基板の状態でテストはしましょう。安定化電源があればできます。
まずは壁センサの確認。
無事にちゃんと取れました~
これぐらいなら壁の認識は困らなそう。 pic.twitter.com/CRPjcteqWG— N.Go. (@N_Go_mouse) 2022年5月30日
いきなりバッテリーを繋ぐのはかなり危険なのでできればやめましょう。どうしても繋ぐ場合は電源とGNDがショートしてないかだけは確認してください。
9. その他
とことこねずみを作った際の日程感をお伝えします。(2022年9月以降は書けてませんが許してください。)

3年に渡って(回路図書き始めた所を入れたら4年)開発をしていたことになります。
完成して初めて大会で完走したのが2022年7月です。なんか3年もかかってますが、2021年の9月くらいから本気だしたので実質1年程度ではあります。なので絶望はしないでください。このブログ見てるしもっと速くできると思いますよ!
てくてくねずみ、HM-StarterKitも開発しているし、他も色々あってこんなになってます。その辺の話はまた別の機会に。
まとめ
さぁどうだったでしょうか。情報マシマシで胃もたれしてませんか?ここまでたどりつきましたか?
とことこねずみを作った際に得たノウハウのほとんどを記したつもりです。ここまで書くことについて賛否両論ありそうですが、1つくらいこんな記事があってもいいと思います。正直これを読んでも絶対に苦労する部分はあると思いますし、後に苦労することになるかもしれません。ですが、少しでも障壁を下げられたら、自作マウスに対して解像度を上げることができたら良いと思っています。
もし、STM32で考えてるんだよな~って人はこちらのブログでも見ましょう。
初心者向けに書いてるとのことですのできっと役に立つはずです。
今回は実例を使って設計のことなどを語りましたが、もう少し普遍的な内容としてはこちらのブログなどを読んでください。私もかなり助けられました。
プログラムの辺りについては正直、力尽きて内容が軽くなってしまったので追記するかもしれません。一番苦労する部分だと思うし... 期待はしないでほしいけど...
有料記事にしてもええんじゃないか??書いたことを褒めてくれ!!!
もし、役に立った知識があれば伝えてください。喜びますので。
とことこねずみと同じ形のマウスが増えても喜ぶよ。どれだけでもパクれ!!
さいごに
あぁ...疲れた... 内容が潰れたからってこんな話題を持ってくるんじゃなかった... 2部や3部に分けた方が良かったかなぁ... アドベントカレンダーの1日に入れる内容ではないよなぁ... 長くてすみません。お疲れ様でした。
これだけの物量を3日かけて書きましたが、最近設計したこともありあまり資料を見返すことなく書けました。品目リストとかは過去に作ってあったので楽でした。資料とか残しておくの大事ですねぇ...
去年のアドベントカレンダーでブログを開設し1年経ちました。記事の数はこの記事で7つ目です。2ヶ月に1更新は出来てたみたいですね。よかった。ほぼ大会のおかげですが... もうちょっと短くして数を増やそうかなぁ... ぜひこれからもよろしくお願いいたします。
次のアドベントカレンダーはコヒロさんの「Fノート 笑う門にも壁切れあり?」です! 壁切れについて詳しく書いてくれてるので私もしっかり読んで反映させていかないとですね... ブログ出すの遅れてごめんなさい!!! もう日が変わるし、SHIMOTORIさんもごめん!!
それでは、ちょっと早いですが、
みなさん今年もお疲れ様でした!良いお年を!!( ´・ω・` )ノシ (17,700 ↑)
やぁやぁやぁ
はじめましての人ははじめまして。
そうでない人は最近の進捗を上げてください!
なんか面白い方向に物事が進んで行ってる気がするN_Goです!
(このことに関してはそのうち何か動きがあるはず)
今回は中部地区大会に出場しましたので結果と内容を書いていきます~
前回の東北地区大会から1ヶ月くらいしか経ってない割には結構頑張りましたよ~
それでは行ってみよう!

大会結果
今回もクラシックマウス競技のみの参加です!
とことこねずみ
Best走行:00:27.314
走行記録:
1R 01:06.987
2R 00:27.314
3R TimeOut
4R R
5R R
すたすたねずみ

Best走行:00:06.144
走行記録:
1R 01:07.111
2R 00:07.674
3R 00:06.144
4R R
5R R
賞:特別賞(勇者)
大会迷路

2018年の学生大会の迷路の様です。一応、クラシックマウス王者のU氏が走ったことが無いであろう迷路を選ばれた様です。
出走動画
出走内容
とことこねずみ
1走目:探索走行(成功) 帰り全面探索(タイマーがかかり途中で終了)
さすがにもう探索は安心して見れますね。良く見るとズレは出てるんですけど一応走れてますね。よきよき。
難なく完走。帰りも探索します。この迷路を見たことも走ったことも無かったので、最短経路がどうなるのか知らなかったんですよね。パッとみた感じ南回りが経路も簡単そうなので経路で出てほしいなって思ってました。実際は北回りの方が早いみたいですね。
なので、南回りのルートを見て欲しかったけど見ずに帰ってきてしまって結構困りました。
2走目:重ね探索(フル迷路探索完了)
かなり迷ってこの選択をしました。審査員の方に「重ね探索したら?」と言われて、それだ!!!となったものの、タイマーがかかって帰ってきているレベルなので時間はなかったんですよね。フル迷路探索をすると2次走行をする時間がなくなるけど、次に走らせるすたすたねずみのために情報を集めようと振り切りました。
あと、2次走行を走らせても攻めたパラメータは調整してないし、下手したらどのパラメータでも満足に走れない可能性はあったので割と合理的な選択にはなっていました。
予想通り、2次走行をする時間が無くなってしまいました。フル探索をした上でどの経路が出たのかの確認はしたかったですが時間が... 残念。
ちなみに迷路結果はこんな感じ。

そして、走る経路はここだったよう。

さらに、上位者が走っていた経路は青色。

これでわかりますね。全面探索したところで最短経路は出てないんですよ。
勝てるわけがねぇ。なぜ青色が出ないかはわかってます。超信地旋回で最速になるような経路導出になっているからです。ターンが重なっていると重み付け的に避けるので青色の経路は出ないんですねぇ... これは早急に解決しないとダメなやつです。勝てなくなる。
3走目:Time Out
正直2次走行を走らせたいなぁとは思ったものの、次もあるのでやめときました。
総評:デバッグ要員として稼働させてしまったので、次はしっかり調整をして未吸引勢の敵になれるようにしたい。(限界は結構見えてるのでそんなに強くはなれない...)
すたすたねずみ
1走目:探索走行(成功) 帰り全面探索(タイマーがかかり途中で終了)
とことこねずみと基本的には同じ内容でしたね。数分前には調整をかねて車軸の締め付けをし直したら、堅くなってしまってうまく動かないことになってました。慌てて緩めましたけどね。なので最初のターンまではかなりドキドキしていました。控え室にある迷路で最終確認をしていたので、ゴール値ミスもするところでした。気付いて良かった。
壁付け後にたまにバグが出るのでそれだけが心配でしたが大丈夫でした。
とことこねずみとはゴールに着くまでは0.2秒ほどの差のようですが、こちらの方が1動作増えている部分があるので間違ってはいないですね。ただ、もっと差が出そうな気がしますけどね...
ちなみに探索終わりの迷路はこれです。とことこねずみの最短と同じ道になります。

2走目:斜め走行(成功) 00:07.674
ターン速度は今回最低でも走って欲しい値にしていました。
さすがに走ってくれたので良かったです。そして、経路が短いとはいえ初めて10秒を切りました。結構嬉しかったです。
3走目:斜め走行(成功) 00:06.144
ターン速度は今回頑張って調整してきた速度でやりました。なんとかゴールしてくれましたね。ターン調整を頑張ったけど、正直限界に近くて走る自信が60%位だったので心配でした。動画を見てもわかるようにかなりズレてますからね...
経路が短く、そんなに折りが多くないのになぁ... やっぱり吸引がいるなぁ...
4走目:斜め走行(失敗)
ここからはターン速度は変えずに直線の速度を上げていきました。
最初のストレート後を抜けられずに引っかかりました。正直、この辺の直線パラメータは練習では出さないので綺麗に直線を走れていませんね。恥ずかしいです。
直線性能がどこまで行けるかはしっかり把握しておくべきですね。サーキットとか出てみたらこの辺のノウハウが付くのだと思います。
地味に、今回から導入している安全機能(フェイルセーフ)も発動して止まっています。これも完全なものでなく、バグが潜んでいそうなのでまたしっかり確認しないとです。
5走目:斜め走行(失敗)
4走目から直線速度を落としたパラメータで走らせたと思います。4走目よりも長く走れていますが、ズレが酷くて修正できていませんでした。
残念ではありましたけど、5走チャレンジできたことがすごく嬉しかったですね。
探索をしっかりやりきって5走チャレンジできたのも恐らく初です。2走は失敗してるから完走ではないですがそれでも嬉しかったですね。
総評:出したかったターン速度で完走できたし、それなりに速いタイムが残せてよかった!! けど、満足してはいけない結果ではあった!!
結果に対する感想
他の方々の調子が悪いなどもあり、最終的には4位(マウスの機体順でいうと5位)という位置になりました。3位の方は非吸引マウスでありながら私よりもはるかに速いタイムを出されていました。しかもターンが私よりも綺麗... これはかなり悔しかったです。タイムに関してはしっかり最短を走られていたので、そこで差が出たのではないかと思っています。完敗。悔しい。残念。
まぁでも、すたすたねずみの中部地区での目標は「走れるようにすること」でした。目標は完全に達成ですね!しかも良い感じの結果で!それは素直に喜びます。
実は、とことこねずみとすたすたねずみとではターンの加減速方法が変わっています。
台形加速からS字加速となっています。今年の関西大会では開発出来ていたのですが、バグがあったのとターンの調整が一からになるので敬遠していたのです。それを出せたのでよかったと思います。効果は...あったかわからない....
目標達成率は120%、気持ち的には70%みたいな感じです。人間は欲張りなもんですねぇ。

(最後まで名前残ってた記念)

勇者賞について

聞き慣れない賞だと思います。だって今年初めてだもん。
公式見解は上に貼った動画の開会式部分を見ていただけたらと思います。
簡単に言うと、中部地区以外から参加した方で上位3名に与えられる賞です。
なぜ勇者なのかというと... 説明むっっず。
全日本大会を連覇している方がいつしか魔王様と呼ばれるようになり、その方が所属しているD-The-Starもまた強いことで有名です。この団体、実は中部地区のどこかにある企業で働いている方々の集まりであるため、中部地区は元々レベルが高いのです。最近は中部地区が魔王領、魔境だとか言われたりしている(?)ので、それをわかっていながら挑戦(参加)しにきてくれた人たちを勇者として讃えようではないか!という感じで勇者になったそうです。(めっちゃかいつまんでます。)
中部地区参加者を除く上位
3名の賞なんですが、順位により賞品がかわります。それも、授ける物イメージで...
1位:聖剣と盾 をイメージした ウイロバーとういろモナカ
2位:黄金の装備 をイメージした ゆかりの黄金缶 (ふりかけ)
3位:状態異常回復アイテム をイメージした 清め餅
遊び心がすごい。
この、面白く、優しさにあふれた賞をいただくことができて本当に嬉しいです。しかもなんかしらんけど1位として。勇者が私とするならば、確実にレベルが足りていないのでもっと精進して勇者の名に恥じない走行ができるようにならないとなと思います。
この賞、準備が結構大変だったらしいので本当に感謝です。ありがとうございました。
(家族には順位の賞よりもレアやでって言われて、確かに...と思いました。)
大会で嬉しかったこと
さて、ここからは感想タイムですね。今回の大会では結構嬉しかったことが多かったんですよね。大きく分けると3つです。
1つ目:自分の結果が結構よかった
そりゃ嬉しいよ。最後でも5位だしね。伴った走りをしたかと言われると...周りの調子が悪かったってのが大きいんだけども。今回用意していただいた勇者賞いただけたのがかなり大きいですね。なかったら3位に届かなくて賞はないですから... ありがとうございました。
2つ目:同期がライントレースに参加してくれた&初完走!!!!
これはね、本当に嬉しかった。このツイート(ポスト)の人なんだけど、彼は私と同期で自由工房では知能ロボットプロジェクトに参加していた人です。
中部地区大会、無事完走できました‼︎
初めて記録残った!嬉しい!
試走会の時点でもともと使う予定だったプログラムだと3分間で走りきれず、ゆっくり加速する代わりに速度がちょっと早い方のプログラムを調整し、なんとか3分以内に戻ってきてくれました。#ものづくり活動記録 pic.twitter.com/mlvT3Ivns6— ゴートゥー (@goto64839) 2023年11月4日
私と一緒で今年から新社会人&一人暮らしをしています。彼は引退後も個人的に知能ロボットを作っていましたが、卒業までに完成はしなかったものの続ける意思はあるようでした。知能ロボットもライントレースをする必要があるため、ロボトレースに出ることも可能ではあります。「大会があった方が締め切りができるし作業進むよ?」とそそのかすことで中部地区に参加させました。(確信犯)
中部地区に在住な上、会場が近い、一度初心者大会に出たことがある、などが重なった結果だとは思いますけどね。彼が1年生の時に出場した中部地区初心者大会では、残念ながら完走はできなかったのです。
言い出したのは4月くらいだったとは思いますけど、良く間に合わせたなぁってのが私のイメージです。彼とは良く通話をして進捗の共有などしていたのですが、動いたのが大会の一週間前ですからね??いや、おかしい。
彼は謙遜するので、私のおかげもあるとか言いますけど、やりきったのは彼なので本当にすごいなぁと思います。
彼の機体はステッピングモータで動くのですが、組み上がってからトルクがギリギリなことが判明していました。少しでも外力があると脱調するけど、今の速度では3分で間に合わないから速度上げるしかない、とかいう限界状態でした。
試走会では段差で脱調するとか言ってたし、3分に間に合わないとか言ってたけど、夜中3時まで色々やってました。(ホテル探すのが面倒で遅くなり、高かったので彼の家に転がり込んだので一緒にやってました。)
本番は出番が被って応援することができなかったのですが、時間的に1度しかない勝負に勝ってちゃんと完走していました。ほんっっっとうに嬉しかった。Freedom kOBoとして出てくれたしね。お疲れ様でした。ありがとう。おめでとう。
以下、彼の感想。囲え囲え!!!(最悪)
#ものづくり活動記録
皆さんの機体めっちゃ速かった。
この世界の凄さと厳しさを痛感しましたね。同時にちょっと、この中に混じれるようになりたいなぁとも思ったり?。
皆さんそれぞれハードもソフトも個性があって見てて楽しかったです!
出走者の皆さん、ありがとうございました! pic.twitter.com/t2C4oJ34SF— ゴートゥー (@goto64839) 2023年11月4日
3つ目:自由工房の後輩もしっかり完走!!!
これまた嬉しい。これで私の身内は全員良い結果で大会を終えることができました!よかった!!
彼女は関西大会ではゴール値の変更忘れで完走ができなかったのです。マウス界ではよく聞くやつですね。彼女のおかげで今回自分がやらなくて済んだと言っても過言ではないかもしれん。
一応学生大会があるので完走出来なくてもチャンスはあるのですが、しっかり完走していて安心しましたね。元々心配する必要のない人ではあるんですけどね。
嬉しかったのはこれだけでは無くて、「研究でマウス作ってみようと思っています!」と言われたことなんですよね。正直、正直に言いますと、彼女はそこまでマウスにハマっていると思っていなかったんですよ。(失礼) 自由工房を引退すれば自然とマウスからも卒業するんじゃないかと思っていたのですが、”自分からやりたいと言うほどマウスのことを考えていた”とわかり、嬉しいを通り越して感動しましたよね。(失礼)
まだできると決まった訳ではないし、最終的にやらない選択肢を取ったとしても、この言葉を聞けただけでもう嬉しいです。
だってさ... (色々あって)ほぼ一人で一時期は10人程度の世話見たんだぜ??自分の進捗もまともに出せないけど、後輩らがのびのびできるように頑張った結果かなぁと思うとね...
後輩からみたら「お前のおかげでマウス続けた訳ではないぞ!!」って言われるかもだけど嬉しいもんは嬉しいんよ。
ちなみに、当時の私と同じ学年となった彼女からは「N_Goさんが当時あれだけ来られてたのはヤバいことだったって今はわかります」って言われました。
まぁ、彼女らとカリキュラム違うし多少はね??? 真似はしない方がいいけど。
嬉しかったことおわり!!大会後にしては珍しく、ほくほくした気持ちで帰ることができましたね。よかったよかった。
試走会
初めて来た名古屋工学院専門学院10号館でした。

なんか学祭していたのですかね?結構学生も居たように感じました。学祭については何も触れなかったのですけどね... 大会当日にメイド服着た学生さんが歩いていて、「男子でもメイド服を着る学祭って存在したんだ...」って思ったぐらいですね。
2機分の確認、調整をしていたらほぼ時間が無くなってました。行くのが遅れたのもあるのですが。
私はこの迷路が走れたので普通にうれしがってました。
— N.Go. (@N_Go_mouse) 2023年11月3日
ミニPi:Co情報
一緒に夜ご飯食べてたので色々聞けましたよ~~!


見たまんまPi:Coですよね!!しっかり1/2サイズになるように作成したようで、とってもかわいい見た目になっています。もはや家に飾るために買ってもいいくらいには可愛いサイズ。これ、TypeCで通信&LiPoの充電もできるそうです!1セルLiPoの充電って結構面倒くさいので一緒になってくれていると楽ですね!
販売予定時期とかも教えてくれました!まず、12月くらいに予約を開始する予定のようです!!もしかしたら、お得な予約特典が付くかも!?!?とのことです!
本発売は5~6月だったかな?(ちょっと曖昧)なので、買ったら関西大会にも間に合うかもしれませんよ!!!
値段もPi:Coと同じ!...とはいかないみたいですけど、近い値くらいでは考えているそうです!6万くらいかな??
Pi:Coの完成度ってすごいと思っていまして、それがハーフマウスでもできるのであればものすごく良いことだと思うのです。だって規模的にはハーフの方が始めやすいんだもん。新規を誘いやすくなる。しかもHM-StarterKitほど高くないし、恐らく扱いやすくなる... ニュースタンダードになると思っています! 楽しみ!!
めっちゃ面白いミニPi:Coの写真撮ったんだけど、ここでは載せられない... 残念...
大会当日の情報
朝ご飯を会場近くのコメダ珈琲で食べようと思い、中に入ってメニュー見てたら隣の席にめちゃくちゃ見覚えのあるマウサーが来てめちゃ面白かったです。まぁそりゃみんな来るわな...
お昼ご飯は駅方面にある「大黒亭」さんへ行きました。女将さん一人でやっている?のかもしれないお店でした。


安くておいしいし良いのですが、提供時間は結構かかります。恐らく一人or二人でやられているので仕方ないです。一人でやってるにしては早い気はする。待つのは良いのですが、大会で出番が残っている人は気をつけて行きましょう。
あまりご飯を食べる所がないのと、14時くらいでほとんどのお店が一旦閉めるのでご飯に関しては注意が必要です... チェーン店すら閉まりますので。
ちなみに、ホテルはエクセルイン名古屋熱田が良いらしいです。なにがいいかって立地です。会場と近すぎます。寝坊したって起こして貰えそうですね。(してはいけないよ)

大会の配信のためのカメラはこんな感じに取り付けられていました。突っ張り棒という手があったか...と思いました。突っ張り棒の方がクラシック用です。


すまん、私が出せる情報はこんなもんです。
NT東京見学

今回も実はなかなかな弾丸旅行でして、大会後は東京へ向かいました。良い感じにイベントが重なったんです。と言ってもかなり時間があったので、NT東京がやっているとのことで、急遽見てきました。
見ていた時間が少なくて、記事一本にするほど書くこともない...けどここで書くと長くなりそう... 余裕があったら上げるかもです。
NTってなんの略かわかりますか?「なんか(Nanka)つくってみた(Tukuttemita)」ってことらしいです。わかるか!!!
これだけは載せときます。


でかい... 電子部品をそのまま大きくつくってみたらしいです。
このATMega328Pの足、全部切削で作ってるらしいです。
切削ぅぅ!?!?いくらするんや... って思ってしまっただけです。はい、それだけです。LEDの足部分とかも切削加工してるらしいです。あと、樹脂ものは型作ったりして基本的に同じ成形方法で作られてた...
Maker Faireにも出ていた人たちも結構いたイメージです。でもその方々も進捗が生まれてた... どんな生活してんだよ...
全然中部地区大会と関係ない話しましたね。すみません。
まとめ
今回もそれなりに長くなったと思っております。いつもすみません。
大会の準備、運営してくださった方々ありがとうございました。そしてお疲れ様でした!とても楽しませていただきました!
個人的には良い気持ちで帰ってこれましたし良かったです!
関西からは近い地区にはなりますので、また参加したいなと思っています!次はもう少し勇者っぽくなって来ることができたらいいなぁ...
それではまた~~~ ( ´・ω・` )ノシ (8000 ↑)
みなさんどうも~~~!
初めての人は初めまして。
そうでない人は進捗ありますかい?
久しぶりに熱を出していたN_Goです!
今回は東北地区大会へ出場してきましたので、結果や内容を書いていきます。
が、結果がザコ過ぎるのと、ハプニングが多かったのと、東北地区大会がとてもよかったので、今回のメインは私の日記です!!時系列になにやってたかを書いていく中で「東北地区大会の良さ」を伝えられるように書きます。
東北地区大会はいいぞ!!長井の人まで届け!!(書くの遅くなってごめんなさい~~)
そうだよ、今回は長いよ。全部読む人は覚悟してくれ。全部読まない人は大会らへんの日記だけ見てくれ。頼む。それだけでいいから。
お品書き
大会結果
まぁとりあえず結果からですね。
今回はクラシックマウス2台の出場です。
目玉は新作の初デビューです!
では結果を
クラシックマウス競技
ロボット名:とことこねずみ
Best走行:1:30.822
走行記録
1R 1:30.822 (探索走行、フル探索完了)
2R R
3R R
4R R
5R Time Out
ロボット名:すたすたねずみ

完走せず(スタート切れず)
大会迷路

2015年の学生大会での迷路らしい。
危険な香りしかしない迷路。探索をクリアするだけならまぁどうにかなる。袋小路に大分入れられるので。
出走動画
出走内容
ロボット名:とことこねずみ
走行動画載せたけどあんまり見て欲しくない...
恥ずかしいです。だって、めちゃくちゃテンションがおかしいので。
テンションがおかしいのは、もう一台の方の開発をギリギリまでやっていて上手くいってないのに出走しなきゃいけないという限界状態だからです。
まぁそれは後述。
1走目:探索走行(成功) 帰り探索(成功)
探索走行ですね。動画での心配は過剰でしたね。あの心配はこのマウスの心配だけではないのでああなってます。
走ってくれるだろうとは思っていたけど、本当に調整出来ていなかったので心配はありました。大会後に気付いたのですが、マウスを真ん中に置いた時のセンサの値の調整をしていなかったです...
久しぶりに触ることもあり、調整項目を忘れていました。ダメですねぇ...
難なく探索でき、帰り探索でフル探索してますが、タイマーにかかってフル出来ずに帰ってきてますね。
でも、さすがの探索安定力。本当にありがたい。助かった。
2走目:斜め走行(失敗)
カンペを見ながら感覚で設定したおかげで自分の想定している値以上が出ていてビビりました。
カンペを見ているような動作ですが、焦点があってなくてほぼ見てないってのが正解でした。焦っているかつ、お話しながらではダメでしたね。途中でまぁいいかっておもって設定したもんね。
斜め走行は失敗しました。これは、調整をしていても無理だったかもしれないなぁとなんとなく思いました。今のままでは多分苦手な経路です。
フル探索ができていたら、もう少し簡単な経路を出せていたと思うので、探索できなかったことがダメでしたね。
3走目:斜め走行(失敗)
2走目よりもパラメータを落としてやりましたが、引っかかりました。このパラメータで走らなければ、もう斜め走行の成功はほぼ無理なので諦めではありました。
4走目:斜め走行(失敗)
何を思ったか2走目と同じターン速度で挑戦しました。結果は2走目と同じ。仕方ないね。
終わった後に気付いたのですが、大回りのみのモードでやればよかったのではないかと気付きました。いつかの大会でも同じことをやってしまったので、ちょっと残念です。
できれば斜めで走って欲しいと思ってしまうのが良くないのだろう...
5走目:Time Out
うーん、言い訳できねぇ!!失敗してるのに5走挑戦できてないので、何かしら変える必要があるんだろうなぁ...
悔しいので大回りの動画を置いておきます。この選択がなぜ大会ではできなくなるのか...
— N.Go. (@N_Go_mouse) 2023年10月22日
ロボット名:すたすたねずみ
これに関しては出走内容がないので、言い訳並べます。
マウスの詳細に関しては別でブログ書こうかと思っていますのでその時にでも。
今回の大会では、出走出来たら奇跡である、と自分で思いながら参加しています。
そもそも、この機体を完成させなければいけない状態を作るための大会参加でもあったので、ちゃんと機体として出せただけで御の字、なんならすごいのです。
人間とは追い求めるものですので、ここまで出来てるなら走らせたかったなぁと思う物です。本当に出走ギリギリまで粘ったのですがダメでした。
原因は回転方向が逆だったことです。実は出走後には解決してスタートを自動で切ること位はできそうでした。間に合わなかった...
動画に残ってしまっている言い訳スピーチですが、一番言わないといけなかったことを言っていませんでした。
この機体、かなり予定を詰めて作成しました。
作成しよう!と思ったのが4月の終わり頃、選定~回路図を4ヶ月、機体設計を1.5ヶ月、配線図を6日、実装を4日(一度失敗)でこの大会に来ています。
半年くらいで作ったんですよね。自作2台目にしては頑張ったスケジュールじゃないですか? 社会人1年目かつ、ほぼ残業しながらなので本当に頑張ったと思う。
真似はしないほうがいい。
ちなみに、あと2日くらいあったら普通に走っていたかもしれないです。残念...
昨日の進捗。
あと2日あったら大会に間に合ったのになぁ… pic.twitter.com/EiMukzgzOV— N.Go. (@N_Go_mouse) 2023年10月17日
N_Goの旅日記
さぁ、こっから本編です。え、もうすでに文字が多いって?それはすまん。
まだ序の口だ
日程紹介
まずは、どのような計画をして東北地区大会に参加をしていたかの紹介をします。
もし、行きたい!と考えている人がいるなら参考の1つにしてください。
ちなみに、このブログを見て色々思案しました。ご参考にしてください。
そして、このルートは身体が強くないとキツいです。真似できないかもしれない。
居住地:京都
[行き]
夜行バス:京都(10/6(金)23:59)~東京(10/7(土)6:24) ¥8,000
山形新幹線:つばさ131号 東京(9:24)~赤湯(11:50) ¥10,860
フラワー長井線:赤湯~南長井 ¥570
[帰り]
フラワー長井線:長井~赤湯 ¥620
夜行バス:赤湯温泉口(10/7(日)23:20)~東京(10/8(月)5:45) ¥6,100
新幹線:こだま739号 東京(15:57)~京都(19:34) ぷらっとこだま予約 ¥12,300
[宿泊]
最上荘:朝食付和室 ¥6,160
合計:¥44,610
これ、値段を安くしようとしたらこうなります。もうちょっと削れる部分はあるだろうけど、時期とか色々あるしこんなもんですね。もう1日余裕があったら最後も夜行バスにしたんやが...
キツいのは夜行バスと新幹線の座っている時間でしょうか。3日間で16時間半くらいは座っています。これが耐えられる人はこのプランでどうぞ。私はいけました。(旅行後がヤバかったですが)
あと3連休じゃないとこの予定は無理です。有給の使い所ですね。今回は使いませんでしたが。
結論:関西から行くのは大変
ここから日記スタートです。
出発前(10/6(金))
家に帰った時間はわからん。夜。
風呂入って、洗濯して、干して、皿洗いしてから出発。
めちゃ頑張ったよ。旅行帰ってきてから出来る気がしなかったからね。偉すぎる。
大量の荷物を持ちながら京都駅で飯を食べようとふらふら。21:30だったのでほとんどの店がラストオーダー前。ラストオーダーギリギリに入ると申し訳無いので、店探し。
深夜までやってるラーメン屋→長蛇の列
やよい軒→ごはんが売り切れ
となり、24時間営業の吉野家を食べる。とりあえず食べれてよかった。ありがとう。
夜行バスに乗り、この日は終了。
東京で新幹線に乗るまで
夜行バスは予定時刻通りに東京に到着。6:30から9:00位まで時間つぶし。
朝ご飯も食べたい!カフェへ行こう! ということでアロマ珈琲さんへ
並ぶお店とのことでしたが、時間が早かったのか待ちなしで座れました。
ここはモーニングが豪華とのことでした。パンがめちゃ分厚くておいしかったです!
ゆで卵はかなりゆるめの半熟。コーヒーはおかわりを無料でいただける(いいんか?)


店内はレトロ風で良い空間です。

時間が経つと結構人が並んでいました。食べ終わった時には並んでいる人もいなかったので申し訳無いけどいつものやつをやらせていただいてました。

新幹線の時間が近づいていてそろそろ出ようと思っていた時に、おかわり2杯目をいただいてしまい、かなり急いでいただきました。そもそも開発しすぎて時間はギリでした。良くないよ!!
9:24発で9:15くらいに改札前へ来ました。なんとか間に合いそうだと思っていたら、改札がとんでもなく混雑しているではありませんか。やべぇ。
混雑している理由は、新幹線の乗車券をスマホsuicaで登録したつもりが、登録できていないという人たちが多すぎたことでした。3人に1人が改札で引っかかる状態で、1つの改札に15人以上が並んでいる。時間はあと5分しかない。自分もスマホsuicaだったので引っかかったら間に合わないんじゃないか。と思い、一度並んでいた列を抜け、駅員さんに確認を取り、もう一度並びました。通れました。こんなにタッチする時に緊張したのは初めてですね。本当に怖かった。
焦ってホームに行ったものの、新幹線自体が遅れていたようで、案外時間がありました。席の号車が真反対だったので助かりました。いやぁ...ヒヤヒヤした...

(先頭の写真撮ってほぼ最後尾まで歩くの結構疲れた。)
新幹線で長井へ!
さて、新幹線へ無事に乗り込みました。やることは1つ。そう、開発です。
隣のお姉さんは酒飲んでたけど気にせず開発開発。

この写真なんか良くて好き

開発していた内容としては、カフェで前作からの引き継ぎプログラムのエラーを全て取ったので、実機にいれて確認をしていました。さすがに走らせることはできないので、スラロームを作成するExcelとかを今回の機体仕様に変更する作業をしていました。
窓の外が緑ばかりになってきたころ、ふと不安に思いました。実は新幹線の切符をもう一つ持っているのです。米沢から赤湯の乗車券。これはスマホsuicaには登録できなかったので紙で出ています。これ、米沢で降りないとダメじゃね?? 急いで調べると山形新幹線は基本的に赤湯には止まるそう。だが一部車両は止まらない... 自分の乗っているつばさ131号は止まらない!!やべぇ!! 急いで荷物を片付けました。
本当に不安だったので客室販売の方に聞いた。合ってた。

ということで米沢で降車。


降りる前、アナウンスで「遅延が発生しているため、停車時間が短くなっております。降りられる方はご注意ください。(意訳)」と言われていて笑いました。無事降りれた。よかった。
米沢から赤湯までは新幹線に乗ってもいいんだけど、在来線で行った方が早く着くので在来線で向かいました。雪国の地方で多いとされる、ボタンを押してドアが開くタイプの車両に初めて乗りました。ボタン押せた!!!

さて、赤湯駅ですがフラワー長井線の出発時間に余裕があったので色々見てました。

ここで注意ポイント(?) JR赤湯駅とフラワー長井線の赤湯駅はホームが違うだけ!!
新幹線降りてそのままフラワー長井線に乗れてしまうのです。(もともとはJRの路線だったらしい)
改札出ずに乗れてしまうのですね。新幹線の乗車券を手元に残したまま乗れてしまうね!バグかな?? 私は一度改札を出ました。ってか米沢では改札出てなかったから、赤湯の改札でどうにかしてもらいました。ありがとう。
フラワー長井線の切符は券売機で購入。切符は買わなくてもどうにかなる(後述)ので正直改札出なくてもどうにかなる、はず。

これがフラワー長井線だ!!!1両編成!!!(ピンク色の車両も存在する)


ワンマン運転(?)です。無人駅もあるため整理券&運賃箱が!!前降り、後ろ乗りなんだぜ!!

これが、切符を買わなくてもどうにかなる(と思う)理由です。正式な乗り方は改札出る方だと思うけど。

時刻表の通り、1時間に1~2本のため、乗客はそれなりにいました。
座っていたら肩を叩かれて振り向いたら、なんともちもちくん(WMMCのKくん)ではありませんか。軽くお話しながら一緒に座っていました。驚くことに宿泊場所が同じなことがここで判明しました。
マウス大会会場のタスパークホテルに行くには長井駅で降りるべきなのですが、Google mapに聞くと南長井駅に降りても歩く距離変わらんとか言いやがったので南長井駅で降りることにしました。旅館に荷物置こうかと思ってたのに計画が狂いました。旅館がチェックイン前に荷物を置いて良かったかは知らん。

— N.Go. (@N_Go_mouse) 2023年10月22日
無人駅があることを知って運賃箱の意味を理解しました。
動画の通り天気は良く、寒くなく、とても過ごしやすかったです!
あとなんか空気が澄んでる気がする!気がするだけかもしれん!
景色が山に囲まれていてなんかよかった。写真は撮ってない。ごめん。
南長井駅から会場へ!
南長井駅についたのが1時頃で昼飯を食べてなかったので会場までにどこかで食べようと思い、Google map開くと近くにつけ麺屋がある。評価高いしそこに決めました。
伺ったのは 自家製麺KEN さんです。

昼時でもあり、お客さんの待ちが4テーブルくらい。店員3人で回していて、座敷にテーブルが4つ、カウンターが4席くらいです。
さすがに回転が速い訳ではなく、食べるまでに30分くらいかかりましたが、仕方ないです。店員さんたちも大変そうだったので文句はないです。逆に大荷物だったからか座敷のテーブルを1人で1つ使わせていただいて申し訳無かったです。
私以降もお客さんは結構来ていて待たれていました。
つけ麺はうますぎた。
食べたのは味玉ピリ辛つけ麺大盛り、うまかった。
チャーシューは分厚いし、麺は中太でもちもち、スープは魚粉も効いててうまい。
次来ることがあればまた食べにこようと思います。おいしかった!


昼ご飯も食べたので会場へ向かって歩きました。これ、橋の先が見えねぇ!と思って取った写真です。わかりにくいですね。信号機が映っていますね。雪国を感じさせる縦信号!

この橋が架かっている下の川は最上川です!
最上川、聞いたことありますよね?「五月雨を 集めて早し 最上川」そう松尾芭蕉の俳句にありますね!1県を流れる川の中では日本最長らしいので、別に長井でなくても見れるとは思うのですが、「あ!!この川が最上川!?」となれたのはちょっと嬉しかったです。
次、歩いていると気付くのですが、アスファルトが赤くなっている場所がよく発見されます。雪国が関係してるんだろうなぁと思いながら、現地の人に確認するのを忘れていました。ググると、雪を溶かすために地下水を撒くらしく、その地下水に鉄分が多く含まれているためサビがアスファルトに付くのでは?とのことでした。(間違ってたら教えてください)
長井の自慢は、綺麗な花、おいしい水、豊かな自然、とのことですので、あぁ、納得と書きながら思っています。

オマケ:「?」ってなんや!「?」って!!!!!(良い名前だ)

試走会へ参加!!
無事に試走会会場へ到着!!




写真を取り終わって一通り顔出したら、開発の続き。
よっしゃまずはセンサが動いてるかとか確認しよう!
センサ値とか見れるモードで確認すると、前を見ている2つのセンサのうち左側が0で張り付いている。あ、これ光ってないわ、極性は...逆やん!!!
ってことで付け直しです。困ったことに、はんだごては持ってきていない。
誰かぁ~~はんだごては持っていませんかぁ~~~

神がおった。持ち主はもちもちくんです。マジで神。ありがとう。
極性変えました。光りました!!センサー値でました! 開発を続けます。
直進を走らせてみようとしました。そしたら全力でベイブレード!!
あれ?ともう一度やってもベイブレード(その場で全力で旋回)。
ちょっと電源落とすのが遅くなってしまってまずいかもと思い、モータドライバの裏面辺りを触ると熱い。そしてなんか変な匂いがする。あ、これは族にいう"焼いた"ってやつだな?? 一応確認のため、モータを安全に動かせるプログラムを。動かない。
やったわ★
分解して確認。


これはやってるわw モータードライバを初めて焼きました。実績解除。
絶縁のために貼ってるテープが焦げる&穴空いてました。笑いました。さすがに。
換えのモータドライバは持ってきてるけど... これ取れるか?取った所でつけられるか?
フラックス無いとキツくないか??
近くにいたSさん「もう使わないこと確定なら足を1本ずつ曲げていけば取れるよ」
N_Go「あ、それなら確かに取れるな。」
N_Go「もちもちくん~~フラックスはさすがに持ってない??」
もちもちくん「ペンタイプであれば持ってるよ!」
N_Go「いや、なんで持ってるの???」
ということでまたまた、もちもちくんという神に助けをいただきました。

気合いで取った。そして付け直した。動く様にはなった。
やっぱり、手付けしたおかげではんだ付けスキルが上がっている。
焼けた原因は回転方向が逆で設定しているため、指令値にどうやっても届かず、フル回転させている、ということでした。いきなり走らせようとするの良くないよ!!!
モタドラ直した時点で試走会の時間が残り30分。さすがに前作の調整をしないのはまずいと、走らせました。
なんか探索で前壁に激突する。なんでや??
前壁の再調整が必要なんか??いや、調整しても当たるな。なぜ??
... よくわからんな。別の迷路でも再現されるかやってみるか。結果、以下動画。
なんか別の迷路で壁にぶつかるなと思っていたら…… pic.twitter.com/sWwcbeZprw
— N.Go. (@N_Go_mouse) 2023年10月7日
いやぁ、やったやった。これはやらかしだ。
ゴール値ミスだぁぁぁぁぁぁ!!!
ゴールが見当たらなくて激突していたみたいです。これ、原因がでないかと思って動画撮ってたけど、面白動画になってしまった。撮っててよかった。ネタになる。
現象の理解まで時間がかかってるのがリアリティ出てていいですね。(誰目線?)
私の中では、関西大会からプログラムを変更していないと思っていたんですね。
でも実際には、名古屋にいるTさんから迷路をいただいていて、家で走らせていたんですね。その時のゴール値が(1,0)だったんですよ。完全に忘れていた... Tさん来てたから献上物持ってきたし、直接お礼言ったのに忘れてた... 人間って怖い。
証拠
聞いて驚け!!見て笑え!!うちに迷路が来たぞぉぉぉぉぉ!!!!
ありがたいことに R.ganonさん (@qtfdl94q )から迷路と壁と柱を譲っていただけました。
もうクラシックはやらないとのことでいただきましたが、この大きさのフルセットは申し訳なさの方が勝ちます… 結果を残して恩返しします!! pic.twitter.com/suPkTwR43q— N.Go. (@N_Go_mouse) 2023年7月26日
厳しい。家でやれるのいいなぁ pic.twitter.com/4Lm8skyXsb
— N.Go. (@N_Go_mouse) 2023年7月26日
ブログ用 pic.twitter.com/K7dAoSJ8rD
— N.Go. (@N_Go_mouse) 2023年10月22日
最後のやつの迷路が激突していた迷路です。(1,0)区間が存在しないことがわかりますね?
そもそも、探索の経路を見て気付けよと。(7,7)へ一直線の探索を恐らくしていなかったはず。慢心と疲れですかね。
そんなこんなで試走会は終了。
東北地区大会前夜祭!!
一度、旅館のチェックインを済ませたあと、交流会ならぬ前夜祭が行われました!
会場の様子

乾杯の瞬間

食べた料理

ビュッフェ形式で取り放題でした!料理の写真をもっと撮っておくべきでした...
他の方の写真を頂戴してもこれくらいしか料理は映ってないですねぇ...

とてもおいしく楽しかったです!当然お酒も出されていましたが、夜に開発するんでしょ??と自分よりも周りから言われてあまり飲んでいません。みなさん、ありがとうございます。その通りでございます。
途中で地酒であるお酒まで振る舞われて、ちょっと飲んだ。日本酒なのに癖が少なくて(飲みやすくて)やべぇやつだってことはわかった。おいしかったです。
個人的には、お水がおいしいと言われていたので、お水を飲んでみたかったですね。違いがわかるほどの舌ではないと思うが...
前夜祭の始めにお話いただいてた方が長井市の前副市長?(ちょっと役職忘れてしまった。だれか教えてくれ)とか言う長井市の偉い人で、あぁ、市ぐるみでやってるんだなとわかりました。ここで、大会の主催、後援を見てみましょう。

"置賜地域地場産業振興センター"、"長井市"、"長井市教育委員会"... 強い...
確かにスタッフが学生などではなく、しっかりとした大人たちでした。このマイクロマウス東北地区大会、大事にされているんだなぁと感じました。
(置賜地域地場産業振興センターのHPにはマイクロマウス東北地区のリンクが貼られています。援助がすごい。)
名古屋から来た組のテーブルに座らせていただいて色々話を聞いていました。
なんか途中から話について行けなくなったりして、知識が足りねぇ...ってなったのでもっと色々知らないとですね。CS+での開発はやめとけって話とGit管理しなよって話は覚えてる。わかってはいるんだぁ...
旅館での開発タイム!
前夜祭の後、旅館へと帰り、ゆっくりするまでもなく開発です。
が、お部屋の紹介をまずはしておきます。私が今回泊まったのは和室タイプのお部屋です。

なぜ和室と洋室があるのに和室を選んだかといいますと、久しぶりに和室に入りたかったのが1つ。もう一つはテーブルが大きいかつ地面に近いと言う点ですね。
そう、マウスの走らせる場所が増えるし、マウスがテーブルから落ちても被害が少ないんです。割とマジでそんなこと考えながら宿取りました。やべぇ奴やな。
部屋に洗面台とトイレは付いていて、お風呂は共用の浴室があります。大きめなお風呂で、ゆったりくつろげました。
あと、部屋の写真の方ではカーテンで隠れていますが、ベランダもあります。
椅子が置かれていて、夜風に当たることができます。そんなことできる余裕がなかったのは残念でした。写真撮りたかったけど忘れてました。すみません。
開発は、試走会でわかった、回転方向が逆なことについてを考えていましたが、直線の方向が合ったと思えば、回転方向が逆になっていて頭抱えました。
どこが間違ってるんだろうなぁとひかれてある布団の上に寝転んだ所、そのまま寝てました。はい、寝落ちです。次記憶が戻ったのは備え付けの電話が鳴っている時ですね。
お"は"よ" (起こしてもらった)
— N.Go. (@N_Go_mouse) 2023年10月7日
情けないですね。同じ宿であったもちもちくんが気を利かせて起こしてくれました。
もちもちくん後輩ですぜ??はんだごてといい、本当に申し訳無いので今度会うときには菓子折持っていこうと思います。本当に。
旅館の朝ご飯はこんな感じで焼き魚が一尾出てきてびっくりしました。

しっかり食べれておいしかったです!とても良い旅館でした。
そのまま寝落ちしていたのでいっそいで片付けて部屋を出ました。
料金の支払いがまだだったのでお財布を見たところ、確実に現金では払えないことがわかり、血の気が引きました。近くにコンビニがないかGoogle mapを見たところ、すぐ近くにあるので、最悪でも払うことはできるか。と思って安心はしました。
クレジットカードでの支払いがOKだったので、ダッシュすることもなく助かりました。
外へ出て、コンビニがあるであろう場所を見ると、「売却地」の文字... コンビニなくなっとるやんけ!!!!あぶなかった!!!!!
旅館を出る際、女将さんに「マラソンに出る方々ですか?」と聞かれたので、「マイクロマウスっていうロボット競技に出るんです」と返すと、「あぁ!マイクロマウス!あの迷路を走るやつよね?」と返ってきました。正直驚きました。
マイクロマウス、と伝えただけでマウスの事が伝わることは今まで少なかったからです。過去にマウサーが泊まっていた可能性は大いにありますが、よく広報されているのかなぁとも感じました。ありがたいねぇ... マイクロマウス大会で町おこし!のレベルではないかもしれないけど、大会を行うことで地域の活性化に繋がると考えていただけて、存続させていこうと市単位で思われているのであれば、ありがたいなと思います。それを肌で感じられた気がしました。
部屋も風呂も朝食も不満などない旅館でした!最上荘、また来れるタイミングがあれば泊まりたいと思います!
大会当日だ!!
さぁ大会です!会場に着くや否や開発の続きスタート。少しの時間を惜しむことなく原因を探していました。他の人の出走が始まっても、自分の順番が近づいてもPCとにらめっこしてたので、端から見たらヤバい奴だったと思います。内心、申し訳無いなと思ってはいたのです。すみません。
大会の結果、感想は上見てください。全部上に書きました。
出走後もまだ粘るとか言う人でなしムーブ噛まして、宴会芸ができるようになりました。
原因解決です。
— N.Go. (@N_Go_mouse) 2023年10月8日
絶対おかしくなると思うからここだけは変えないでおこう、と思っていた場所の変更をしたら正常に動きました。くそぅ...
PCとにらめっこしながらでも会場内なので声は聞こえます。面白いことになっているのは聞いていましたよ。皆さんお疲れ様でした。
お昼ご飯、皆がラーメンを食べに行くのに混じれなかったので開発の続きとかクラシック迷路のリベンジなどをしていました。
マイクロマウス競技の準備をしている所を見ていましたが、天井にカメラを付けて迷路を撮影していました。天井が近いとこういうことも出来るんだなぁと思いながら写真を撮ってしまいました。

そういえば触れていませんでしたが、動画の見やすさがかなり良いと思います。クラシックマウスの方は上の写真の右端に映っているガチカメラで人を撮っていました。
動画では複数の画面が表示されていて、ロボットの走行が終わるなどすると人物のカメラにスイッチングされるんですよね。ちゃんとスイッチャーがいるってことですよ。
これは簡単には真似できないなぁと思いながら色々見ていました。
もう一つ、写真の奥にスクリーンがあると思います。ここに配信されている画面を投影してくれていました。ハーフ競技の時にこれがかなり活躍していました。ハーフの迷路は床に置いている訳では無いため、観客はちょっと見づらいです。囲まれて2列目などになると尚更。そこで天井カメラとスクリーンの出番。天井カメラなのでマウスの動きが見やすく、なおかつゆっくり見られます。ちょこちょこスクリーンで見ている人たちもいたので、結構いいなと思いました。
大会の運営を経験していたらこういう所にも目がいくようになりますねぇ...
マイクロマウス競技の後半は、ちょっと別の用事があり、席を外していることが多くて申し訳無かったです。皆の勇士を直で見たかった。すまねぇ...
本当に自分のことだけやっていたので、交流もちゃんと出来ませんでした。特にN島さんの超絶技巧のマウスを眺めることができなかったのはミスりました。
色々と罪悪感があったので次からは気をつけます。
表彰式!そして芋煮だぁぁぁぁぁぁ!!!!
これのために来たと言っても過言じゃねぇ!!!!!!

(過言ではある)
正直、芋煮って聞いたことはあったけど食べたことなかったので初でした!
味噌汁ってわけじゃないんだ、と思ってたのですが、地方によって色々あるようですね?戦争になるやつかな?
おいしかった!!昼ご飯食べてないのもあったからいっぱいいただいてしまった!おいしかった!! おにぎりも鮭、梅、しその実漬とあり、地元の新米とのことでおいしくいただきました!あとはけん玉クッキーと、なんかずっと形変わるやつ(折り紙で作れる、インフィニティキューブとか言うらしい。)もいただきました!至れり尽くせりか?? インフィニティキューブ、手作りらしい...参加者結構居たのに... すげぇ...
表彰式は私は関係なかったのですが、賞品が豪華!!!
新米!!箱のぶどう!!玉が金色のけん玉!!これが1人に贈呈されます。やべぇだろ... あとはめちゃ大粒のマスカット、大量の缶ジュース箱、など... 豪華でしたね...
賞取りたかったなぁ... (ちなみにけん玉は長井市の市技らしいです!けん玉の全国の生産量の7割を長井市の山形工房が占めるらしい...)
そして!ビンゴ大会!!!ビンゴ大会の景品すら多くて、みんなに行き渡ってて笑いました。本当にありがとうございます。ちなみに私ははずれ枠とされていたドーナツでした!! 抹茶味おいしかったよ!!!
ビンゴカードは見慣れた文字しかないビンゴカード... 個人名まであるのは面白かった。

ビンゴも終わり、解散!机にある物全部持って帰ってください!!となったのですが、私の居た卓は席が埋まっていた訳ではなく、貰っても余ってたんですよね。
全部貰っても申し訳ないしなぁと思いながらいたら、「いる?欲しいなら全部持って帰って!袋はここにあるから!ほら!全部!!」と全部袋に入れられた貰ってしまいました... 本当にありがとうございました。おかげで2食くらい浮きました。


これがせんべいの袋に書いていた「けぇ」「くぅ」の思い??
さぁ帰宅!!の前に赤湯で温泉!!
こっからはガチの日記です。行きでは来れなかった長井駅から赤湯駅へ戻ります。


赤湯駅到着が18時過ぎくらいでしょうか。帰りの夜行バスは23:20です。時間はたくさんあるので、とりあえず夜行バスの乗り場を探します。
赤湯駅から歩くこと...15分~20分くらいか?見つけました。え...ここ?????

とんでもない不安を感じました。
まぁでも時間を潰さないと!赤湯と言えば温泉!!
目星を付けていた温泉(というよりも銭湯)へ向かいました。
それがここ!!赤湯温泉 湯こっと さん!

見るからに綺麗。中も綺麗でした!シャンプーとボディソープがついて300円!!安い!!そしてなんかお金払えばワインも飲める!!(今回は飲まなかった。)
19:20着くらいでしたが駐車場はそれなりに埋まっていて、お客さんが結構いました。地元の方たちが多いのかな?家族連れの方が多かったです。
ロッカーは荷物多い人向けを考えられているのでしょうか。大きいロッカーがあり、助かりました。入らなかったらどうしようかと思ってた。
どうせ時間があるので、ゆっくり入ろうとなが~~~~いこと入っていました。
露天ではないですが、外にも浴場があり最高でした。お湯は少しぬるっとする感じで温泉の湯ではあったようです。ちなみに、赤湯という名前ですが、温泉の色が赤い訳ではないそうです。戦で傷を負った兵たちが湯治をし、その血で湯が赤くなった、というところからきているそうです。
いい湯でした。サウナはありません。が、外にあるお湯が結構熱かったので、疑似サウナをしていました。疲れてんのになにしてんだ。
なんだかんだゆっくり過ごし、1時間くらいは浴場にいたようです。やりすぎ...
 湯こっとさんのロビー 奥にワインサーバーがある
湯こっとさんのロビー 奥にワインサーバーがある
さてさて、時刻は9時、あと2時間。どうしようか... 近くにイオンタウンってあるな。結構敷地でかそうだし、フードコートとかないかなぁ、とイオンモールをイメージしたのが悪かった。駐車場を取り囲むようにマックスバリューと飲食店がずらり。まぁそりゃそうか。
お土産を買ってなかったのでマックスバリューでお買い物をし、あと1時間程度。さぁどうしたものか。芋煮を結構食べたとは言え、お腹もすいてきた。いっぱいもらったおにぎりを消費したいなぁの気持ちがある。かつ、なんか面白そうなカラオケ屋があったな。そこに行こう。ということで来た場所がここ!ゴリラが目印!カラパラ!

夜のゴリラこっっっっわ。
アホなので料金とか見ずに1時間で入ろうとすると、店員さんから会員証を作成することになると言われました。作らないと入れなさそうなので作成することに。住所を書く必要があり、京都って書くの嫌だなぁと思っていると、後ろから「11人なんだけど入れる?」と酔っ払ったおっちゃんたち。
2部屋に分かれて良ければ入れるけど、会員証が2枚必要になるとのこと。
店員さん「(おっちゃんたちに向かって)会員証の作成には300円必要なのですが構いませんか?」
N_Go「!?!?(聞いてないが???仕方ないか...)」
1時間しかいないのでドリンクバーではなくワンドリンクにしたが、一番安くて400円。ドリンクバーは500円。果たしてどちらが良かったのだろうか、でもおにぎり食べれるからOKやなと思っていたら、壁に貼られたお店からのお知らせを発見。
「持ち込みは厳禁です。見かけた際は3000円支払っていただきます。」
重すぎるやろ... ということで、おにぎりを食べることすら叶わなかったのでギリギリまで歌いました。もったいないもん。
なんやかんや総合計1,760円かかった。イオンタウンにあったガストに行った方が安上がりだったのでは?という考えは封印したいと思います。私はネタを買ったのだ。
さて、バス停で待ち。マジで来るのかこれ、と思っていたらもう1人待ち人が増えたのでちょっと安心しました。が、出発10分前になってもバスがこない時はかなり焦りました。(夜行バスは出発10分前から乗車開始がほとんどなので。)
もちろん、ちゃんと来て定刻通りに出発しましたよ。結構夜行バスのっていますが、初めての3列シート!
隣がいないので気にすることがなく寝れるのは良かったです。特に広くはないね。
(ちなみに、月曜の山形新幹線はやばかったようですね。乗客の鞄から発煙したとかで止まったみたいで... 親から連絡来ましたw)
そのまま帰宅...ではなく東京で遊ぶ!!
これは計画のうちです。別件がうま~~~いこと参加出来たんですよ。大変な旅行だぜ全く。
東京駅の銀の鈴広場だっけ?あそこで時間を潰しながら、貰ったおにぎりを朝食にしてた。ありがたい。
秋葉原に行って秋月電子の2階にも行ってきたよ!500円のはんだペースト買うか結構迷った。手付けでやるからいいやって踏みとどまった。
東京着いたときに思ったんだけど、長井とは空気が違う気がしました。なんだか東京の方が重い感じ... まぁ雨がすごく降ってたのもあるかもしれん。けどやっぱり違うのかなぁと思いました。
最後は新幹線!こだまだと結構時間かかるんだね!!

ぷらっとこだまで予約するとドリンク1本無料券貰えるんです。なのでドン!一番のやつ~~~

隣の人は若い女性の方だったので躊躇したけど、寝てたのでやりました。
ここで、もらい物のお菓子が助かる助かる。おいしかった~~!
帰宅!!からの後日談
家に到着は夜9時くらいでしたかね。さすがに家でご飯作る気になれなかったので外食してから帰りました。
今までは旅行後の服などは親にやって貰っていましたが、1人暮らしではそうもいきません。その日中に洗濯して干しました。偉すぎる。
翌日は普通に仕事に行きましたが、さすがに疲労がでかすぎて辛かったです。有給を使うという選択肢、選べばよかったかもしれない。(業務の納期がまずかったので行かない選択肢がなかったけど。)
その翌日、めちゃくちゃにパフォーマンスが悪くて苦しみました。夜、家に帰って体温計ると37.2℃。熱あるやん... 久しぶりに熱出してびっくりしましたね。頑張りすぎです。
なんてことがあったので、ブログ書くことが出来ませんでした。すみませんでした。
日記終わり!!車中泊合わせて、3泊4日の旅!疲れたけど楽しかったです!
最後のまとめ

ここまで全部呼んだ人おるか知りませんが、これだけの文面かける程には濃い大会になりました!大会の結果は残念ですし、試走会、大会中の交流をほとんどやれていないので申し訳無い気持ちがたくさんです。やはりある程度の余裕は欲しいですね。
少ない交流ではありましたが、しっかり圧をかけられた期待を寄せてくれた人もいましたね。精進... 精進します...
ただ!!大会はものすごく楽しかったです!私は、地元の関西大会、学生大会、全日本大会以外は出た事がなく、今回初めての地方地区大会でした。
話に聞いていた部分ももちろんありましたが、実際に参加してみることで地方ごとに色があるんだとわかりました。社会人になったことですし、一度は全ての地方大会に顔を出せるようにしたいなと改めて思いました。
長々と書きましたが、このブログでは東北地区大会の魅力を伝えきれてないと思います。おもてなしの心っていうんですかね?歓迎されているのがとても良く感じられて、少しいい気になってしまうような自分もいました。この辺の気持ち、実感は文字では伝えられないので是非とも参加されてみてください!長井の方々は絶対に喜んでくれますよ!!(無責任)
来年も参加したいなととっても思うのですが、来年は九州の方にも行ってみたい...
両方の大会の時期と私の進捗状況次第ですかねぇ...
もし全部読んだ物好きさんがいたら感謝します。ありがとうございました。
今回は(も?)更新遅くなってしまってすみませんでした。
ではまた、次は中部地区大会後かな?ばいばーい!( ´・ω・` )ノシ
(15800 ↑)
みなさん~~~
初めましての人は初めまして。
そうでない人は気合い入れていこう!
またまた久しぶりになってしまったN_Goです!
今回は関西大会に出場してきたので結果と内容などを書きます!
またどうせ長くなりますので好きな所を読んでいってください!

大会結果
今回はクラシックマウス競技で1台のみの参加となりました。
しかも全日本大会から進化がない状態で。仕方ないって。環境変わってんだから。
一応開発したけど調整が間に合わなかったんだよ!
クラシックマウス競技
ロボット名:とことこねずみ
Best走行:00:12.872 (全体5位)
走行記録:
1R 35秒くらい
2R R
3R 00:12.872
4R R
5R Time Out
賞:5位入賞
出走動画
出走内容
1走目:探索走行(成功) 帰り探索(成功)
探索走行。正直、あんまりマウス見てなかったです。普通にマイク渡されたので、なに喋ろうかなって考えてたことしか覚えてないですね。
まぁそれくらい探索が安定していることがわかっているので信頼していました。
ついにこのレベルにこれたのか、と毎回実感して嬉しくなります。本当に。
難なく完走。試走会のタイミングでゴール内の探索している時に壁を作って出られなくなっていたのでそれだけ心配でしたが、大丈夫だったのでお喋りの続きをしていました。といっても話すことがないし、言いたいことが言えてないし、良くない...
帰り探索は、全面探索をしていましたが、終わる前にタイマーがかかって帰ってきました。毎回タイマーかかって全面探索が終わらないのもどうかと思うので考えたいところです。
探索したマップはこれです。大半の探索は終わってたようです。

2走目:斜め走行(失敗)
このパラメータが走ればまぁ満足って感じのパラメータで走らせました。
パラメータは覚えてないです。多分直線1.2m/s、ターンは0.7m/sですかね。
最後のゴールセンサーを超えられなく、Rとなってしまいました。
最後の最後に!!!とは思いましたが、見てた人たちが盛り上がっていたし、自分的にはそんなもんだろって思ってたので、盛り上げられてラッキー!って思っていましたね。 エンターテイナーになった気分でした。(そんなことで盛り上げるな)
動画で確認してほしいのですが、会場の声が音割れしてるレベルで出ているので、動画を見ていて思わず笑いがこみ上げて来ました。みなさん、反応ありがとうございます!!
動画見てて思いましたが、普通あそこでひっかかるわけがないんです。
ゴール前で斜め45°してやがるこいつ。
これはバグでは??ゴール値は(8,7)だから直線でいいはずなんだけど... もう迷路情報崩してしまったから検証できねぇし...
ゴール内だったらどうなってもいいか、って思ってあんまり問題視してなかったやつだなこれ... 2走目は直前の135°が膨らみ過ぎてて、ゴールに入る前に45°を曲がり始めたのが悪そう。
3走目:斜め走行(成功)
2走目でミスしましたが、いけそうな感じがあるし、時間も走行回数も残っているので強気に出て2走目よりも直線のパラメータを上げました。多分1.5m/sです。
なにを言っているかわからない人がいるかもしれませんが、マウサーは走らなかったらパラメータを上げるらしいんですよ。 ヤバいでしょ?
2走目とは違い、どうにかゴールをしてくれたので記録が残りました。非吸引マウスの最速記録が11秒だったので負けてんなぁ、と思ったのが正直な感想です。
4走目:斜め走行(失敗)
もう少し直線のパラメータを上げた走行を行いましたが、こけてしまいました。
モード選択がこれで良かったのかは微妙ですね。
5走目:Time Out
またかよ。探索の時間をタイマーで制限かけてるくせに間に合わないのは何事??
起動してからモード選択の時間が長いことはわかっていますがどう短縮したものか...
起動音は個性として置いておきたいですし、かといって電源つけたままでタイヤ掃除するのは難しいし、パラメータも複数用意しておきたいし。
もっと走行が速くなればいいんか。(個性を諦める方が早い)
結果に対する感想
クラシックマウス競技の全体で5位で表彰もしていただけて嬉しい気持ちです。
が、悔しい気持ちも多くあります。一番大きいのは、非吸引マウスに負けたことです。しかも2台に。そのどちらも(順当な)斜め走行はしていない...
これは結構悔しいです。スペックでは勝てるはず(傲慢)なのに自分の準備不足が勝てなかった主な原因なので。家に迷路を置くしかねぇんだよなぁ...
実はターンパラメータの上があったのですが、成功する気がしなかったので止めました。でも、結局4走目が走れなかったので挑戦しておくべきだったかなぁとは出場後に思いました。
後は走っていた経路が悪いですね。斜めが多くて調整しきってないパラメータで行くには難しすぎる経路だった。こちらの経路の方が、同じパラメータでも時間がかかってしまったのではないかと思います。そろそろ単純な歩数最小経路は卒業しなければダメですね。
なんにしろ残念です。悔しいです。得たことは多いので次は負けないように頑張ります。
試走会
ここからは競技以外の記録になります。
実はマイクロマウス関西支部の支部員に今年からなったので、今回は完全にスタッフとしての参加でもありました。
といっても、何をしたらいいかが微妙にわからなかったので、自由工房時代とほぼ同じことをしていました。
でも、自由工房の皆の手伝いはしていないし、何もしていないスタッフの爆誕!!となっていたので申し訳無かったの一言。
準備はロボトレースの設営を担当していました。トレーサー民、コースの悪口は私に言うんやで。責任は(ほぼ)私だ。
今回のロボトレースの板は新調したものでした。組み立て方法も以前から変更し、組み立てはスムーズに進みました。地獄のネジ留め調整がなくなったのは本当に楽だった。(やったこと、見たことある人しか地獄がわからない。)
そのくせしてライン引きに時間がかかったのは私の監督ミスのせいだと思うので反省。
新調して発生した問題として、表面がざらざらでした。しかも板ごとに少し差がある...
ペンキを塗ったのも私なので愚痴は私にどうぞ。
それと、カッティングシールが何年前かわからないやつを使っていたので、粘着力が落ちていたのですかね?ラインが浮いて浮いて大変でした。ざらざら+粘着力低下 の合わせ技で辛かった。

結局ほとんどのラインとコーナーマーカーの下に両面テープを仕込みました。
今回から吸引が解禁されたのでそれでも不安でしたけどね。
ロボトレースコースの作成を手伝ってくれた方々、ありがとうございました。お昼が遅くなってしまった人もいたので本当に申し訳無い...

スタッフお昼ご飯はこれ!おいしかった!

お昼を取るのが遅かったので、会場に戻ると試走が始まっていました。
一緒にコースの作成をしたYさんと、「帰ったらコースが剥がれていて、その対応することになったら面白いっすね」って話しながら会場に戻ったら、本当に修復作業から始まったのは面白かったです。いや、面白がってる場合じゃないんだ、トレーサー民、ほんとすまん。次回はもう少しマシにします。
準備が一段落したので、試走に入りましたが... クラシック迷路の列が長すぎる...
本番の迷路で調整がしたいのは自分も同じだったので仕方ないですが、1回走らせるのに40分位かかるのはキツい... これは運営として考えないといけないところですね。
1回走らせたら、ゴール内で壁を作ったみたいで、最短を見ることすら叶いませんでした...

もう一度並ぶ時間もないし、用意してきた滑らかな加速のターンはすぐ使えるレベルでないことがわかったし... やれることねーや、ってなってた。
多分ここが今回の結果に響いたんだろうなぁ... 現行のターンの調整しときゃよかったのかねぇ...
そんなこんなで試走会が終了。懇親会へ。
なにを話したかあんまり覚えてねーが、いらんことは言ってた。
お店や一般客の方に申し訳ねぇなぁ、とは思っていた。絶対こんなに大人数の対応に慣れてるところじゃないお店だよ...(実は色々トラブルがあって急遽決まったのでお店には本当に申し訳無いです。)
なにはともあれ楽しかった! 家に帰って寝るまで(なんなら起きてからも)しっかり酔ってたけどね。

大会当日
奇跡的に朝起きれたよ!!目覚まし付けずに起きれるなんてさすが趣味だな。
受付が開始されて皆が集まり出したころ... 遅れる人の連絡が飛んできました。しかも4人も... いや笑ったよ。大笑いした。自分が遅れる側にならないで本当によかった。マジで。
出番は午後だったので、午前中は大会観戦と交流とをしていました。調整する気がなかったので... いろんな人と話せた...かな??
ロボトレースの最後の方はスタッフとしてライン修正のお供をしていました。
そのおかげで速い方たちをみれたのでめちゃくちゃ楽しかったです!
お昼ご飯はこれでした!おいしいのよ。

午後も変わらず観戦&ふらふらしてました。自分の番が近くなるとソワソワするんよ。
雑に絡みに行ってしまいましたが、EX MACHINA のチームロゴステッカーをいただけました。かっこいいよね、これ。

クラシックマウスも終わり、マイクロマウスの最終を見ることができました。
なんだ、あの戦いは... そもそも3秒切れないとダメってところがおかしい。レベルが高すぎる。
1.700と1.698という0.02の差を見せつけられて熱くなりました。ドラマティックでしたね。全日本大会じゃん。
こんなかっこいい戦いを何回も見れるなんて光栄だなぁ、なんて思います。
この記事の最後に関西大会の競技動画URLを貼っておくので是非とも確認してください!
表彰式、ありがたいことに景品が多いので1~6位まで入賞、かつ特別賞や団体賞、ブービー賞まで表彰することができました。協賛企業の皆様、ありがとうございます。
私もクラシック5位なので表彰&景品を貰うことができました。ありがとうございました!!

しかも貰えたのはテスター!!テスターはまだ買っていなくて、どれを買おうか考える必要があったので本当に助かりました!!さらに!学生時代に使っていたものと同じで、使い勝手がわかっているもの!! 完璧すぎる...

閉会式後はすぐに片付けの手伝いをしていたので、別れの挨拶が適当になってしまい、すみませんでした。自分が頑張るべき場所はここかな、とは思ったのですが、スタッフの仕事というよりも自由工房の仕事だったので、スタッフとしてはやっぱりダメでしたね。来年はもう少しスタッフの仕事を忘れないようにしたいです。
片付け自体はマウス班がちゃっちゃと終わらせてたので、私は本当に手助けをした程度でした。卒業したやつがあんまりでしゃばってもダメですしね。(と言いながら代わりに指示を出してしまった件はいくつかあった。)
ぜーんぶ片付けが終わったのは8時過ぎくらい!マウス班はお疲れ様でした。
計測やスタッフをしてくれていた自由工房のレスコンの民、支部長に呼び出された工房OBの皆さん、本当にありがとうございました。相変わらず激務をお願いしてしまい申し訳無いです。個人的に感謝状を送りたい。
大会中、知っている人との交流はもちろんやっていましたが、本当に外部の人とも交流をしていました。オープンキャンパスのついでに見に来てくれてそうな親子さんに、話しかけに行ってマウスのことをお話したり、学校内で迷子になっているオープンキャンパス民を助けたりもしました。
めちゃくちゃお節介ではあるのですが、意外な所で接点が生まれるのが大会の良いところです。
マウスをまだ初めていないけど熱心に競技を見ている人に声をかけ、説明して、適切な人を紹介したことで、今回の大会に参加するきっかけになった事案がありました。
そういうのはとても嬉しいものです。個人的にすごく嬉しかったです。
逆に、今回は話しかけられることもありました。話を聞いていくとマウスの第2回大会から観戦していると言う方がいらしていて、まぁ驚きました。
ばっちりNFTの理事の所まで連れてきましたよ!繋がりを作ることが出来ていたら嬉しいです。
今回は本当に知っている人が多すぎました。全国のマウサーに加え、自由工房の後輩、同期メンバー、先輩、先生... こんなに対応できるか!!! 同期とか先輩を大会見学に誘ったけど、まさかこんなに自分に余裕がないとは思ってなかったです。反省です。
自分から呼んでおいて、話しかけておいて、十分に話が出来ないまま新たな人が見えてお話するとかが良くありました。もう少しゆっくり話したかった人もたくさんいました。申し訳無いです。またの機会にゆったりお話しましょう!
顔が広くなるってのも大変なんですねぇ... 嬉しい悲鳴なんで是非とも今後も声かけてください。よろしくお願いいたします。
その他
もう、自分でなに書いてるのかわからなくなってきたな...
今回のとっておきとして、Twitterアイコンの缶バッチを作ってきました!!
こちらのやつですね。
知ったきっかけはある人のリツイートでした。こういうのに目がない私は早速作って参りました。それがこれです。

もう一つはわかる人にはわかる。この人のリツイートだったので作ってきました。そしてプレゼントしました。会場で付けてくれていましたね。
欲しい!!作りたいな!!と思った人、少し残念なこととして、カメラのキタムラでも店舗によっては作れない店舗があるのです。なので、近くに対象店舗がなければ作れません...
もし、どうしても欲しいと言う方、私に連絡ください。いつ渡せることになるかはわかりませんが、作ってきますよ。自分のTwitterアイコンの画像を添えてDMでもしてください。
まとめ
今回は1競技しか出場してないのでまだ文章量的にマシですね。(どこが??)
社会人になって初めての大会はスタッフ兼出場者、そして5位入賞。
これは頑張った方ではないでしょうか。入賞に関しては学生時代の頑張りですが。
頑張った方ではあるけれど、結果的には悔しくてたまらんです。
大会に来たらモチベが上がる、とか比にならんくらいには負けず嫌いで沸々としているのでこれからを楽しみにしていて欲しいとは思います。
スタッフとしては、
みなさん、参加していただきありがとうございました。
の気持ちでいっぱいです。
関西大会としては初めて?のエントリー111台。そして足を運んでくれて、盛り上げてくれて、本当にありがとうございました。
マウス合宿で宣伝させて貰いましたし、Twitterでもうるさいくらいには話題として流したと思います。それでこの結果になったのなら私は鼻が高いです。恐らく3連休のおかげですが。
また来年もよろしくお願いします!!頑張らせていただきます!!
改善できる所は改善していきたいので、もしご意見などありましたらお伝えください!

最後に関西大会の動画を置いて終わります。
ここまで読んだ人が居るのであればありがとうございます。
次の大会は未定ですが、全日本大会まで引っ込んでいるつもりはないです。

良い笑顔
では、またどこかで! ( ´・ω・` )ノシ (5800 ↑)
大会動画
良ければ高評価とチャンネル登録?もよろしくお願いします。
UPした人が喜びます。
クラシックマウス競技
午前
午後 前半
午後 後半
マイクロマウス競技
前半
後半 ←ラストが熱すぎる
関西支部のURL
結果などがのっています。ぜひご覧ください。
マイクロマウス委員会 関西支部 | Robot running in the maze. It's "Micromouse"
どうも!
初めましての人は初めまして!
そうでない人はお元気ですか?
GWは疲れそうなN.Go. です。
4/30(日)に「Maker Faire Kyoto 2023」に行ってきたので見てきた感想を書こうと思います!
良いブログのネタだし、Twitterで言うのもなんだかなぁとなったのでここで書きます。
早めに書いておかないとお蔵入りになりそうなのでちゃっちゃと書くのです。(1日では書けんかった...)
多分いらん情報が多いと思います... メモ的な意味があるので許して...
※出展ブースの紹介をしています。出してはいけない情報があれば連絡をください。修正します。
まず...
そもそもですが行くつもりがなかったんですよね。日付のチェックも全然していなかったし、京都でやることすら流してたので。
29日にTwitter見てたらマウスのブースを出してる写真や、出展情報が流れて来て、なんとなく置き去りにされてる感があったのでちょっと調べたら京都でやっているではありませんか。1時間程度で行けるし... やりたかったことを前日に詰め込んで時間が作れたので2days目に行くことにしました。
Maker Faire の存在は知っていたし、いつかは行きたかったので好都合って奴ですね。
見てきたものたち
適当に行くことにしたのでなーーーーーーんにも予習せずに会場入りしました。
こんなんできるから1人は楽なんだよなぁ...

タイトルに出展者情報のリンクを入れてるので詳しい内容はそこからどうぞ!
まついのまうす製作所
ここしか目的がなかった。

見つけられずに一度通り過ぎた。
ほとんど最奥に配置されており、真っ先に向かった割にはさらっと大半のブースに目を通した感じでした。
目の前に来たらコヒロさんが気付いてくれました。とてもありがたかったです。
そこから1時間?2時間?くらいお話してました。気分は試走会に来た気分。(邪魔するな)
大半は「ハーフマウス良いっすよねぇ」でした。後は自作迷路作成のことだったり、社会人でマウスを継続していくコツなど色々とお話していただけました。
多分「いつまで居るんだろう」って思われたんじゃないかな。自分でも思った。

マウスのブースはそれなりに途切れず人がいた感じを受けました。あと、全体的にですが子供連れが多い。本当に。これはMaker Faire自体にですね。どこで知ってるんだ...
マウスは基本的に触れないから親御さんかブーススタッフが触わるのを止めてる光景もありましたね。
他のブースが結構触れるものが多いのも関係してきそうですけど。
そういえば、M5 Stackと書かれたTシャツを着た人たちが来られてマウスをめちゃくちゃ見られてました。どうやらM5 Stackを作った人(ほんとに?)らしくて、なんかすごい人たちを見かけたようです。
やっぱりマウサーと話すと、走っているマウスを見るとモチベ上がりますね。
いろいろ難しいですが進めて行きたいです。
ちなみにZirconiaの基板は初日に売り切れたようです。仕方ない。発注するか...
MaSiRoプロジェクト
マウスブースの向かい側で、常に人が居ましたね。

Twitterで見たことはあったのですが、実物は初めて見ました。いやぁ、すごいですね。

ちょっと動画はないのですが、動きがめちゃくちゃ滑らかでした。常に目や身体が動いていて、目を合わせてくれるし、とっても可愛かったですね。
22?21?軸の制御をしているとのことでやっぱりそれ位はいるのだなぁと思いました。他にも色々話をしていただきましたが、2LDKの家に3人居るという話がインパクト大きかったですね... 寝るところ以外はほとんど浸食されているようで...もはや尊敬ですよ。マウス勢が言えたことではない。
開発を手伝えるような感じにしているとのことなので興味のある人はいかがでしょう?Rosも使ってると言われていたはずです。Linux環境らしいです。(間違ってるかもなので自分で確認してね)

勇者技術研究所

でけぇ...
車型に変形するらしい。ちょっと実際には見てないのでわからないけど、ロマンを感じる。
どちらかと言うとこの裏の二足歩行ロボットの方にコンタクトを取ってました。
所属していた団体でもやっていたので、ちょっと話をふっかけたら自分の知り得る人はご存じで面白かったです。あちら側もなんか面白がられてた気はする。
山口自動機械
知能ロボットでドローンを使っていた人が居ると聞いていたのですが、ご本人がおられました... 思わず声かけました。
ちゃんとボールが動くことを見せていただいた。
本機から飛び立つ所がかっこよかっただけど取るのが間に合わなかった。 pic.twitter.com/MYOkbOosFn— N.Go. (@N_Go_mouse) 2023年4月30日
知能ロボットってスタート地点にさえ収まればどんな大きさでも、分裂しようとOKなレギュレーション(多分)なので、本機がスタート地点にある感じでした。
本機から飛び立つ時、アームが動いていてかっこよかったのですが、動画には撮れませんでした。
動画では見えにくいですが、本機の方にはカメラを付けていて、それでドローンなどを見て制御しているようです。発砲スチロールは認識しやすくするために付けているらしいです。
てっきりドローン側で確認しているもんだと思っていたのでちょっと驚きでした。

あと、確認の為に出展者情報を見たらマイクロマウス大会(多分ロボトレース)にも出てたらしい... 話せばよかった...
DoiLab
結構、奥行き感はわかったし、どこからでも見えて面白かった。 pic.twitter.com/W8kmdtf3Q3
— N.Go. (@N_Go_mouse) 2023年4月30日
扇風機みたいにLEDのバーを回して光りの絵を描く奴、と原理は同じで回転方向と表示方法を変えたものです。どの角度からでも見ることができるので、3D映像を表示できる、という感じだったと思う。ちょっと違うかもしれない。
ダイナミック点灯してるので動画ではわかりにくいかもしれませんが、目で見ると結構良い感じです。回転なのでエネルギーの問題とかがありそうですが、こういう表示方法も面白いなと思いました。
裏話として、昔は電球を並べて繋いで回してたから配線がとんでもないことになってたとか、今もラズパイが物理的にぶんまわってるとか聞けて面白かったです。
Shigezone
完全に「ツイ廃」という言葉につられました。


さすがに買うことを即決はできんかった... ちょっと憧れるけど時間がさらに消えることになるんだろうなぁ... 液晶なのでスマホと同じ感じで動かせます。環境整えて使うか??
ツイ廃の民の誕生日プレゼントにしたい。自分以上のツイ廃を見たことないけど
いしかわきょーすけ
小型ペンプロッタを作られています。ここまで小さくなるとかわいいですよね。
かわいい。 pic.twitter.com/PWD933FPNt
— N.Go. (@N_Go_mouse) 2023年4月30日
動いているとちょっとキュルキュル音がするので家に置いたらうるさいかも、と言われていました。


手書き文字の輪郭をOpenCVでベクトル取得してプロットすることもやられていました。ちょっと半分わかってないけど、すごかった。(小並感)
柊工房
空中配線はロマン。かっけぇ。そしておしゃん。


ちょっと動画撮れなかったのですが、黒電話を使ったレジも作られてて、古風なカフェに置いて欲しいなと思いました。黒電話の入力とかベルとかいいよね。
(使ったことない世代です。人によっては震えそう...)
カサネタリウム
これもTwitterで事前に見てはいました。実物が見れて良かったです。
フレキシブル基板だからできる曲げ。 pic.twitter.com/6DXtmz4bpv
— N.Go. (@N_Go_mouse) 2023年4月30日
これ、曲がっているのは電気で伸び縮みするワイヤーのおかげらしいです。細すぎて動画では見えないですかね。写真でも見えん。

なので、フレキシブル基板がメインのブースでした。危ない。Twitterだけでは基板だけで曲がっていると認識していました。
曲がるけど素子は飛んでいくらしくて接着剤の選定が大変だったそうです。
堅く固まる接着剤だと吹っ飛ぶらしいです。苦労するところは色々なんだなぁ...
素子の固まっている所が1ユニットで、複数のユニットをPCを使って制御するようです。(説明がむずすぎる)
面白いことに使えそうではあるけれど、アイディアを出すのが難しそうだなぁ...
Nii@iroiromake
スタンクちゃん。かわいい。これはかわいい。
スタックチャンがそもそもかわいいからなぁ...
かわいい。 pic.twitter.com/gNYLRzJTJX
— N.Go. (@N_Go_mouse) 2023年4月30日
コントローラーで良い感じに動かすことができるし、Hitされたら振動が来るし、もうおもちゃとして出せる。ビームが物理スイッチのトリガーは良い。
赤外線でHit判定をしているそうで、受光側のアンテナ?の構造は工夫されているそうです。
りひと工業自動車部
公道で走れる自作原付自動車を作っているみたいです。
これとほぼ似ているものを作ろうとしている先輩がいたので引き寄せられましたね。




なんか写真ぶれてるのはすみません。
神戸市で登録したそうで、紹介の動画の風景に知っている所があって個人的に面白かったです。エンジンを積んでいるようで驚きました。
ちなみに座席の下にエンジンがあるので車内は熱いらしいです。エアコンないですし...
denha's channel(でんはちゃんねる)
いやぁ、ずっと見てられる。
永遠と見てられそうだった。 pic.twitter.com/OQoaFfYp4T
— N.Go. (@N_Go_mouse) 2023年4月30日
動画の一番手前にある球を飛ばすものはカムを使っていて電池が少なくなっても飛ぶ距離は変わらないらしいです。カムってそんな使い方もできるんだねぇ...
テオ・ヤンセン機構を使っている物もあるらしく、それはテオ・ヤンセンさん本人に見て貰えて、サインを貰えたらしいです。サインも見せて貰いました!写真はない!
こういうの自分でも作ってみたいですよね、老後に細々作っていたい... 老眼が問題とか言わないで。
GANGU~
男の子ならみんな好きだと思う。ゴム鉄砲。しかも連射できる。



MDFをレーザーカットして作られているみたいです。
なんとキーホルダーもありました。


買っちゃいました。なんかいいっすよね。ゴムは発射できないのが残念ではありますが。銃が好きな先輩にでもプレゼントしてみようか...
開けてみたら良い木の匂いがしたのでそれも良かったです。
DIY女子高生まんが「ホームセンターてんこ」
こちらにはグッズに惹かれました。
実際に使える工具のキーホルダーたちです。実際に測れるノギスキーホルダーを何も考えずに買ってしまいました。後々考えたら、普通のノギス買える値段じゃねーか??と思ったのは内緒。
実際に切れるはさみとかも売っててミニチュアが好きな人にはたまらんのではないかと思います。


これ以外の出展ブース
ほとんど全部のブースを回れて、お話できたブースもあったのですが、写真がなかったり、ちゃんと理解出来てなかったりするので許してください。モウツカレタ...
自作でブラシレスモータを作っていたり、パワードスーツ作っていたり、基板で簡単に演奏できる楽器を作っていたり、デバイスとデジタルを組み合わせたシューティングゲームを作っていたり、周りの色を見て色を変えるペンライトだったり、2つが同期されてるペンライトだったり、機構を3Dプリンタ物で可視化してみたり、リレーを使ってリズムを刻んでみたり、ロジックICでCPUを作っていたり、etc... etc... 色々ありました!
皆さん、やられていることに自信を持ち、生き生きされているのが目に見えたので自分の制作モチベーションも上がりました。対応してくださった皆さん、ありがとうございました!!
おわりに
なにも考えずに行ったのですが、最大限楽しめたと思います!!
マウスのブースでなぜかスタッフじゃないのに説明をしたりもしました。一般の人がマウスを見たときにどのような反応をするのかをブースを出してないのに感じられたのは良かったです。こういうのは定期的に感じた方が良いんですよね。いいとこ取りさせてもらった気分です、すみません。ありがとうございます。
ただ、マウスが安定して綺麗に動きすぎてて、なーんも難しく見えなくて怖かったです。
あれは罠だ... けどとても憧れる... あのレベルへ行きたい...
と、いうことで、モチベはしっかり上がりましたし、自分も励んで行きたいと思います!
近くないと厳しいですが、Maker Faireにもまた行きたいです!
余談:帰りに疲れたなと思ったけど1万歩くらいしか歩いて無くて体力不足を感じました... マウスブースメンバーはそのままキャンプに行くとのことで体力お化け過ぎて怖かった。
さすがじゃぁ...
それでは、また~ ( ´・ω・` )ノシ (5400↑)
どうもどうも、
初めましての人は初めまして。
そうでない人はお元気ですか?
久しぶりのN.Go.です。
本当に遅すぎるのですがマイクロマウス全日本大会2022のまとめを書きたいと思います。
大会が終わって2ヶ月経ちました。正直ほぼ忘れてるんですけどまだ記憶が残っているうちに書こうと思います。
大会前、大会後からここまで、めっちゃ忙しかったんで許してください(今もだけど)。それはまた別に...... カケナイカモ...
それでは目次です。全ての感想を書くととんでもないことになりそうな(なりました)ので結果から書きます。
見たい所だけ見て貰って構いません。
大会結果
大会の結果はこちらになります。
マイクロマウスファイナル競技
名前:No name1

Best走行: 2:09.664 (全体10位)
走行記録:
1R R
2R 2:48.664
3R R
4R R
5R R
賞: 優秀学生賞
受賞理由:ベテラン勢であっても完走できない、時間のかかる迷路であったにも関わらず、学生であるのに完走したため。
クラシックマウス競技
名前:とことこねずみ
Best走行:00:15.616 (全体6位)
走行記録:
1R 00:58.953
2R 00:15.616
3R R
4R R
5R Time out
賞:ロボット学会学生特別賞
受賞理由:クラシックマウス競技に参加した学生の中で一番成績が良く、以前に受賞した経験がないため。(学生一番は他の方であったが、受賞経験アリだったため繰り下がりが発生した。)
出走内容
No name1(マイクロマウスファイナル)
動画:恐らく自分の所から始まるはず。(1:09.40くらいからです。)
1走目:探索走行(失敗)
まずは定石通りに探索走行。一応全面探索をするようにはしていて、探索打ち切りタイマーも付けているプログラムを動かしていました。
ミスの原因は恐らくフィールド上のホコリのせいであると思っています。
見返してみると...連続してスラロームをした際に角度がずれているように見えますね。
ホコリのせいでちょっと滑ったのかなぁ...どうだろうか...
2走目:探索走行(成功)
ちょっと走らせた時のモードが間違っているかもしれないですが、これは1走目とは違い、往復探索のモードですね。帰りが全面探索ではないのですが、一応タイマーを付けています。
ゴールした後に最短走行が始まって帰ってきていますが、これはバグですね。本番はタイマーが働いて帰ってきているものだと思っていましたが、どう考えても時間が合わないんですよね... (タイマーの条件式がアホでした。)
ちなみに、帰りの最短走行は経路を事前に導出していない最短なのですが、直線部分を数えている間の思考時間がもろに影響しています。これでも無駄な処理をしないようにしていたつもりなのですがかなりズレてますね。やっぱり32×32は経路導出しないと走らせられないですね。
探索したマップです。最短経路なんだよなぁ...

3走目:2次走行(失敗)
モード的には直線速度を上げた斜め走行だったと思います。最初の直線を抜けられずのミスになりました。本番中、この原因が全くわからなかった。マップは崩れるはずがないし、始めの曲がりなので経路がミスするとも思われない。
ただ、左右に揺れて走っていた気がしていたので無駄に距離が増えたり、壁切れが誘発されたのかなと思っていました。
よくわからなかったので4走目を行うことに...
4走目:2次走行(失敗)
今回は速度をもう少し上げての大回り旋回のモードだったと思う。走らせてすぐに左壁を沿うように走りました。ここでセンサーの異常を疑いました。3走目も揺れていた上に2走目の帰りにぶつかりまくっていたのでセンサーマウントが動いたのかとも考えていましたが、大きな変化はありませんでした。(HM-StarterKitはセンサーの感度が良すぎるので微量の変化でも値は結構変わります。もしかしたら動いていたのかも... 直しようはないですが。)
5走目:2次走行(失敗)
ラスト走行を前に3分ほど時間があったので冷静になるために時間をおきました。内心は焦りしかなかったですよ、ほんとに。
最短のゴールはしたいし、どうやら速度を上げると引っかかるということがわかっていたので、2次走行の中での最低直線速度に、最低ターン速度で大回りのモードに決めました。大回りの所だけ欲が出ました。
結果としては失敗に終わりました。問題の直線は越えましたが、途中でぶつかりました。このぶつかりは壁切れ制御の誤発な気がします。ターン後に車体が斜めを向いてしまっていたので恐らく... それかバグか。
大回り旋回ではなく、通常のスラロームのみの2次走行にしておけば走りきったかもしれないのでそこが悔やまれます。
とことこねずみ(クラシックマウス)
動画:モザイク処理などしていないので変なことには使わないでくださいね。
1走目:探索走行(成功) 帰り探索(成功)
まずは探索走行。こちらはかなり安心して見ていました。探索くらいは安定しててくれないと話が進まないので... ちょこちょこズレてはいたので完璧ではないですが...
帰りの探索は全面探索をしています。途中で不自然に止まった所でタイマーの時間が来て全面探索から往復探索に切り替わっています。2分を残して帰ってこれたのでタイマーは入れていて良かったです。
探索したマップです。まぁまぁ経路は出ていたようです。

2走目:斜め走行(成功)
動画を見られていたらわかると思いますが、めちゃくちゃ喜んでます。
というのも、このパラメータは結構攻めたパラメータでした。直線の速度は控えめではあるものの(忘れました、すんません)、ターンは0.7m/sでした。
用意していたパラメータの上から2番目になります。これが走れば満足レベルだったので良かったです。
そもそも公式大会で初めての斜め走行での完走!!!
そりゃ嬉しいって!!!!
3走目:斜め走行(失敗)
2走目が終わり、うっきうきで機体を回収してタイヤ拭いて、車輪を回してモード選択をしていたら異変に気付きます。右側のエンコーダが動いてない??
いつもは右側の車輪を回してモード選択をしているのですが、モードが動かない...
なぜかわからんけど左は動くから左でモード選択。
走らせるとスタート位置で旋回、しかも右輪は動かず... 車体をよく見たら気付きました。モータのコネクタ抜けてる...
嬉しすぎて迷路からマウスを取るのが雑になったみたいでモータとエンコーダの線が抜けてしまっていたようです。もったいない...
4走目:斜め走行(失敗)
時間がヤバかったのと、ある程度の目標は達成したので、ほぼほぼ成功しないパラメータを走らせました。案の定走りませんでしたね。調整が甘い上に制御が足りてないです。
5走目:時間がないので棄権
動画の切れる前に質問されていますが、フレッシュマンかどうかの確認です。
フレッシュマン登録がされていたみたいです。ご迷惑おかけしました。
結果に対する感想
マイクロマウス競技
結果的には完走、2次走行は出来ず、という結果になりました。完走が目標ではあったので良い結果ではあるのですが、2次走行(奇跡的に最短経路)を走り切らせたかった思いでいっぱいでした。後から走らせるHM-StarterKit勢は2次走行まで完走したとのことだったので尚更...
あと、走行経路ですが、HM-StarterKitとそれ以外のマウスとで経路が違うんですよね。上手く噛み合ってくれたみたいでかなり簡単な経路を通ってくれたんです。
このおかげで完走できましたが、この部分は自分の手を加えてないので、これで賞がいただけたのだと思うと...なんか複雑です。他の方と同じ経路を通っていたら完走できていたのかわからないですからね...
クラシックマウス競技
結果は、斜め走行完走、クラシックマウス競技6位という、目標は達成以上なので良い結果ではあるのですが... 内容を振り返るとミスが多い。5走全部ゴールさせたい。
2分残して帰ってきて、1走を15秒で走れるのに時間が足りてないのは単純に反省かなと思います。モード選択に時間がかかりすぎている。色々なプランを考えているせいでもあるけれど、置いてからスタートするまでの時間も長いです。その辺は改善対象ですね。
賞としてロボット学会学生特別賞をいただけました。が、学生で1番で貰えているわけではないので釈然としない気持ちがあります。それに、6位なのでパッと見たらすごい成績なのですが、中身を見ると、かなり5位と6位の差があります。その差9秒。
ちなみに7位の方は自分よりも早い記録を出せています。時間切れだったので自分のほうが順位的には上になっています。
ただただ運が良かっただけ説がある...
総評
どちらの競技でも目標の達成をした上で、賞をいただくことができました。
さらに、どちらの賞も「学生」と名が付いており、学生最後の大会で滑り込みでかっさらっていけました。しかも所属団体の方でも団体賞をいただいています。(こちらはほとんど自分とは関係ない)
これ以上ない程しっかりと記録を残せた大会になったと思います。
ですが、「まだまだこんなもんじゃダメだ」という気持ちが大きかったです。
めちゃくちゃ嬉しい気持ちも、人に自慢したい気持ちも当然ありました。が、手放しでは喜べてなかったと思います。もしかしたらそう感じた人も居たかもしれませんね。(うちの先輩は気付いてて、気付くもんなんだなぁって思っていました。)
受賞者として選んでくれた方からしたら反応が違ったかもしれないのでそこは申し訳無いです。賞に関してはそれはもう喜んでました。心の中ではうひょうひょ言って踊ってる自分もいました。本当に。
いつか手放しで喜べる受賞をできるように精進します。
試走会
ここからは思い出です。流していただいて構いません。
試走会の前に...
出発前に気付いたバグを夜行バス内で原因を考え、カフェで実装していました。
まぁいつものことですね。
い つ も の
(縮小版) pic.twitter.com/UeD00UeOTU— N.Go. (@N_Go_mouse) 2023年2月18日
バグ内容としては、壁切れ制御が思わぬ所で発動していることでした。このバグのおかげで、あるパターンではほぼ確実に壁に激突するようになっていました。
出発日とはいえ気付いて本当に良かった。
今回は浅草での開催ということで、会場に行く前におみくじを。
同じ番号引いてる人いたな…… pic.twitter.com/3rEcRAXi1Q
— N.Go. (@N_Go_mouse) 2023年2月18日
そして、浅草行くと伝えたらオススメされた浅草メンチを食べて会場へ。おいしかった。来年も食べよう。並んでるけど回転速いから案外すぐ買えます。350円するけど。


台東館~スカイツリーを添えて~
会場内はこんな感じ。(モザイク適当です。すみません。)
試走会はマイクロマウスを動かし、クラシックマウスを動かし...をしていたら時間が吹っ飛んでいった印象です。交流もある程度はした...はず...
32×32迷路に並んでる時に結構喋れた印象でした。話していただいた方々、ありがとうございました。
カフェで書いたバグは直ったことが確認できました。間に合ったのでセーフです。
こちらの名札もいただけて嬉しかったです。次回以降もぶら下げときます。

試走会での成果
まぁまぁまぁまぁまぁまぁ pic.twitter.com/JVYCnlJ05Z
— N.Go. (@N_Go_mouse) 2023年2月18日
カツッ… カツッ… カツッ… pic.twitter.com/VUMscpCNgk
— N.Go. (@N_Go_mouse) 2023年2月18日
早い時間に試走会が終わり、晩ご飯にしては早いし...と思ってホテルに帰ろうとすると、他大学の学生軍団(WMMC、Mice、OOEDO SAMURAI(学生?)等)に捕まえられ、ご飯をご一緒させてもらいました。(ちょっと寂しかったので助かりました。)
そもそもみんな同じ団体で集まって食べるんだなぁ... 後輩連れて行ったことない...
学生メンバーでお食事!
デザートまでしっかり食べました。 pic.twitter.com/qQSoydJrrD— N.Go. (@N_Go_mouse) 2023年2月18日
2手に分かれたのですが、こちらは平穏でした。もう片方は...まぁ...楽しそうでしたね!
団体の現状や、なぜマイクロマウスを始めたかなどを話し合って楽しかったです。
ホテルでは特にやれることがなかったのでおとなしくしてました。やっぱり迷路持ち運ばないとだな...
大会当日
受付済ませてつい写真を撮ってしまいました。「ファイナル1番なんてそうそうなれない。そもそもファイナル出れることが光栄過ぎる。なんで2競技参加してるんだ。」と思ってました。2競技はね、大変だよ。中のプログラムがほとんど同じでも。

初めてのファイナルはまぁ緊張しました。でもファイナル常連ベテランさんたちとよくお話することができて本当に嬉しかったです。「ファイナルへようこそ」感をビシビシ感じながらも、走らせられることが光栄だなぁと思ったので早く自分でマイクロマウスを作って帰ってきたいなと思いました。
クラシックはそわそわしながらやってたイメージですね。微量に緊張してるし、待ち時間中は後輩が走っているわ、A面の方も気になるし、といった感じで落ち着いてはなかったですね。良い感じに結果も出てうきうきでしたが、やっぱり速い人たちのを見ていると満足してる場合じゃないなと思いましたね...
お昼にはつけ麺を食べました。おいしかったです。来年も行こうかなぁ。

1つ誤算だったのは、待ち時間が長くて途中で午後の部が始まってしまったことですね。そのおかげでやべぇ連中になってたのを共有します。スマホで中継見ながら飯食べてました。
(勝手に写真使ってすみません。)


ファイナルのラストあたりはもうほんとに面白かったですね!!
出走待ち椅子のすぐ後ろにいることができたので最前線で、しかも周りから解説、考察が聞こえてくる最強位置で観戦することができました。隣にはアニキさんもいて、いろんな情報を聞くことができて贅沢な時間でした。
最後の頂上決戦は声出まくってて恥ずかしかったです。それくらい見応えがありましたね!
その後はマウスを並べての交流会!いろんな人と話せた気がします。特にAs川さんには長いこと質問をしていたのに全て答えていただきました。ありがとうございました。
話しかけに来てくれた方もいましたし、マウス界隈の人に少しずつなれているのかなと思い嬉しかったです。今後もお願いいたします!
1つだけ、失敗しました。どの企業ブースにも立ち寄れなかったです。調整に追われ、観戦をし、交流をし...としていたらもう撤退されていた... 残念... なんなら怒られる...
ちなみに、参加賞のアルコールスプレーのアルコールを入れて無かったり、フォトスペースを使うことが出来なかったりと、こちらの方も手が回らなくてダメでした。
次回の大会こそは全部のブースを回ろう。
後日談


戦利品

団体賞は後輩が頑張ったから貰えたものだし、自分はあんまり関係ないんですけど対象ではあるので載せときます。
賞を頂けているので学校のホームページの方にも出てたりします。
RTさんの学生支援キャンペーンでいただいたHM-StarterKitを使っての出場であったため、RT NEWSにも写真が載っています。ありがたいありがたい。
ロボット学会学生特別賞は遅れての到着だったのですが、なぜか学位授与式の日に渡されました。式中ではなかったのですが、私の所属学科生全員の前で表彰の形で...ロボット名を高らかに... 恥ずかしい... 光栄ではありますけどね?
送付の対応などに関係してくれた方々、ありがとうございました。
上でも少し触れましたが、帰って来てから、事情を知らないはずの先輩に会ったら「今回の結果、満足してないんやろ?」と言われたんですね。確かにTwitterでははしゃいでる感じは出してなかったけど、言及してないのになぁ... 気付くものなんですね~
(もしかしてどこからか情報を??)
「よくわかりましたね!」と答えたら「こわいわ~」とは言われましたが。
まとめ
長らくお付き合いいただきありがとうございました。読むのが疲れたことでしょう。
今回は第43回全日本マイクロマウス大会の振り返りをしました。
本当に楽しく、マウスの面白さを再確認した大会だった気がします。
次も同じ場所、同じ時期に行われることが決定しています。2/17、18ですよ!!
私はまず出場権を得られるように頑張ろうと思います。今年はファイナルは出られんな... マウス作らねば...
それでは、またいつか( ´・ω・` )ノシ (7000 ↑)