Ricardo Garcia Pinel | Personal Webpage (original) (raw)

@ Willow - Inria Paris
> Computer Vision and Robotics_
I am a PhD Candidate (graduating in Spring'2025) in Computer Vision and Robotics at Inria Paris/DI ENS, working at Willow research team under the supervision of Ivan Laptev and Cordelia Schmid.
I am currently on the job market seeking research opportunities in both academia and the industry. If you'd like to chat, please don't hesitate to reach out to me.
I love learning about Computer Science topics and currently I spend my time teaching robots to perceive and act.
Interests:
Deep learning, robotics, computer vision, natural language processing
Professional Experience:
![]()
PhD Candidate
Inria Paris | 2021 - 2025
Research Engineer
Inria Grenoble | Jul 2019 - Aug 2021
![]()
Research Assistant
DLR - Munich | 2017 - 2018
Education:
![]()
PhD Computer Science
ENS-PSL | 2021 - 2025
![]()
MS Informatics - Exchange
TU München | 2016 - 2017
![]()
MEng Electrical Engineering
TU Madrid | 2015 - 2016
BE Electrical Engineering
TU Madrid | 2011 - 2015
News
June 2025
🎓 Defending my PhD thesis - I will be defending my PhD thesis with title "Learning visuomotor policies for robotic manipulation" on 4th of June 2025. More information about my thesis defense here.
May 2025
Talk at ![]() in AI & Robotics at ICRA 2025 - I presented our GemBench and 3D-LOTUS++ work at the lightning talks session of LatinX @ ICRA25. You can find the slides here.
in AI & Robotics at ICRA 2025 - I presented our GemBench and 3D-LOTUS++ work at the lightning talks session of LatinX @ ICRA25. You can find the slides here.
April 2025
Talk at ![]() - I presented some of my work during a talk hosted by the PRIOR team at the Allen Institute for Artificial Intelligence. You can see the recording here.
- I presented some of my work during a talk hosted by the PRIOR team at the Allen Institute for Artificial Intelligence. You can see the recording here.
Recent Publications
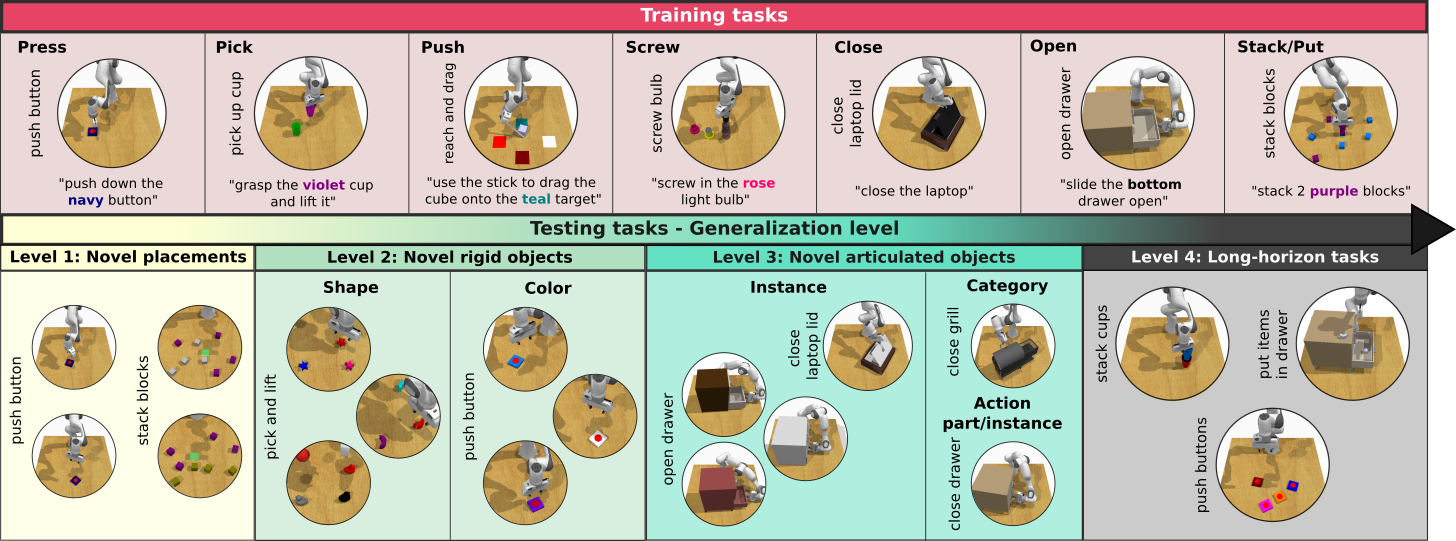
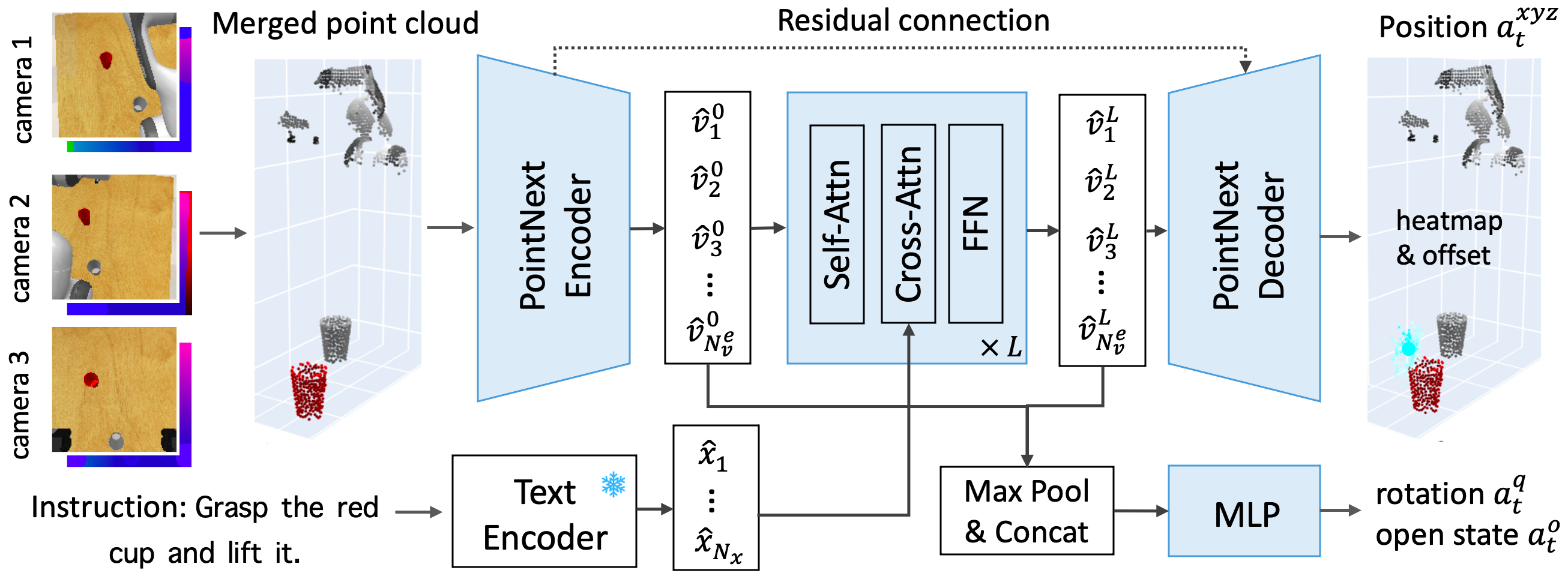
Towards Generalizable Vision-Language Robotic Manipulation: A Benchmark and LLM-guided 3D Policy
ICRA 2025

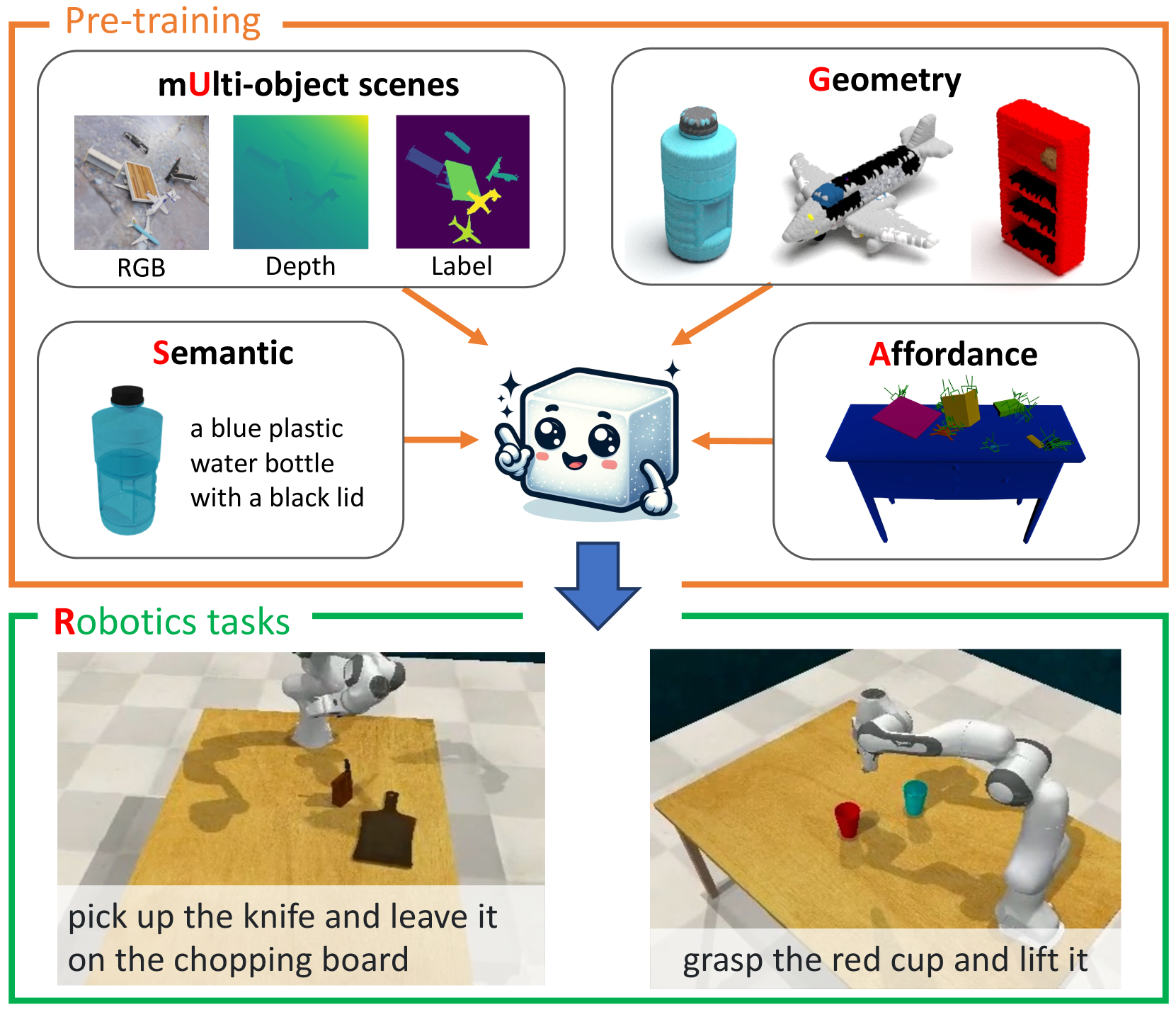
SUGAR: Pre-training 3D Visual Representation for Robotics
CVPR 2024
Shizhe Chen, Ricardo Garcia, Ivan Laptev, Cordelia Schmid
PolarNet: 3D Point Clouds for Language-Guided Robotic Manipulation
CoRL 2023
Shizhe Chen*, Ricardo Garcia*, Cordelia Schmid, Ivan Laptev
Robust visual sim-to-real transfer for robotic manipulation
IROS 2023
Ricardo Garcia, Robin Strudel, Shizhe Chen, Etienne Arlaud, Ivan Laptev, Cordelia Schmid
Instruction-driven history-aware policies for robotic manipulations
CoRL 2022 - Oral
Pierre-Louis Guhur, Shizhe Chen, Ricardo Garcia, Makarand Tapaswi, Ivan Laptev, Cordelia Schmid
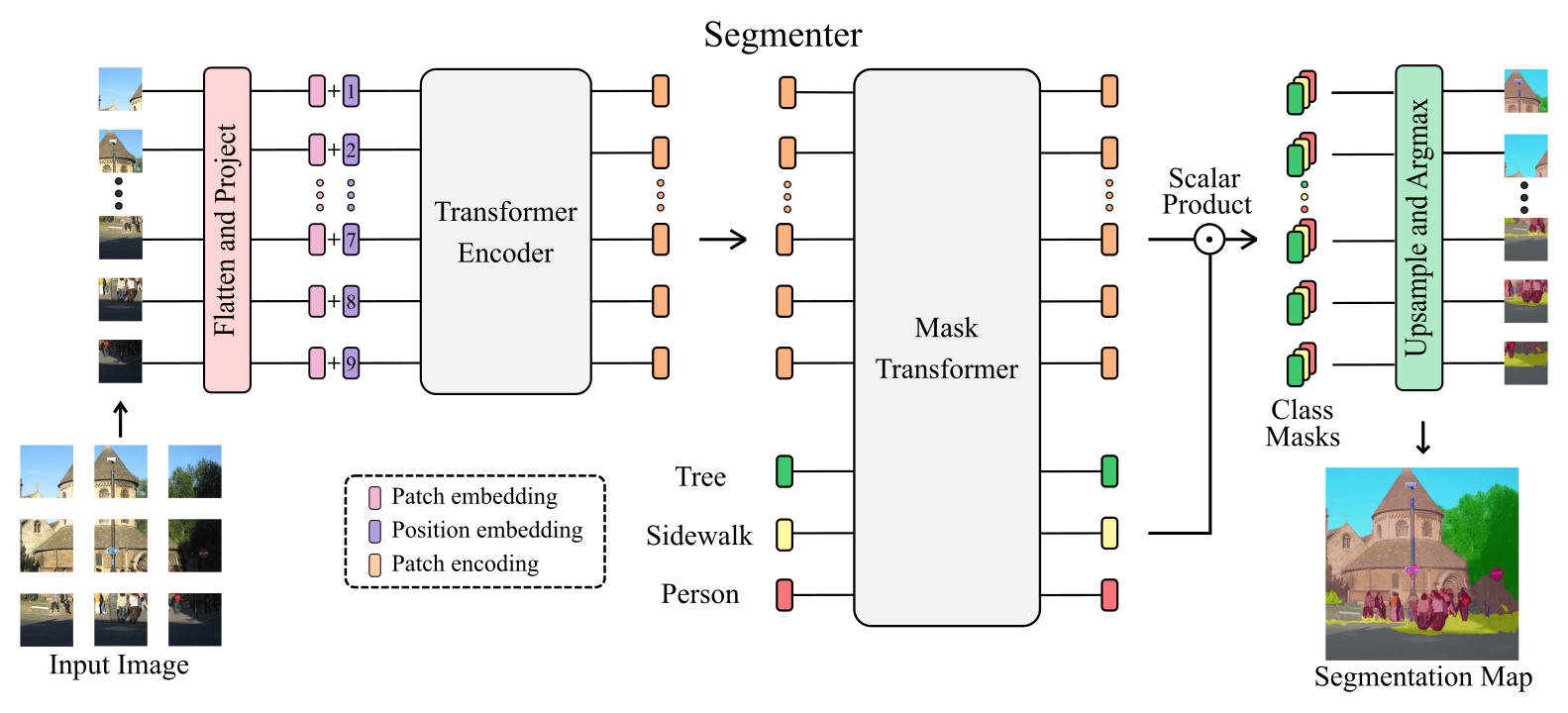
Segmenter: Transformer for Semantic Segmentation
ICCV 2021
Robin Strudel*, Ricardo Garcia*, Ivan Laptev, Cordelia Schmid
Learning Obstacle Representations for Neural Motion Planning
CoRL 2020
Robin Strudel, Ricardo Garcia, Justin Carpentier, Jean-Paul Laumond, Ivan Laptev, Cordelia Schmid
DeepIG: Multi-Robot Information Gathering with Deep Reinforcement Learning
IEEE RA-L 2019
Alberto Viseras*, Ricardo Garcia*
*Equal Contribution
Teaching
Services
Conference Reviewer
ICCV 2025, CVPR 2025, ICRA 2025, ACCV 2024, CoRL 2024, ECCV 2024, CVPR 2024, ICCV 2023, IROS 2023, CVPR 2023
Journal Reviewer
IEEE Robotics and Automation Letters (RA-L)
International Journal of Computer Vision (IJCV)
IEEE Transactions on Knowledge and Data Engineering (TKDE)
IEEE Transactions on Image Processing (TIP)