Weikang Wan /ˈweɪˌkɑːŋ ; wɑːn/ (original) (raw)

PhD Student, UC San Diego
I am a Ph.D. student in CSE atUC San Diego, co-advised by Prof.Hao Su and Prof.Henrik I. Christensen. Previously, I received my B.S. in Computer Science (with honors) fromPeking University. I have also spent time as a research intern atNVIDIA GEAR andNVIDIA Seattle Robotics Lab, and as a visiting student at CMU and UT Austin.
I'm interested in building embodied agents that can perceive, think, reason, and act like humans in open-world environments. I develop algorithms that facilitate robot learning via visual imitation, world models, simulation, and RL, and build scalable, continually learning systems for physical agents.
📢 Feel free to reach out if you'd like to discuss or collaborate!
Publications (show all by date /show selected )
*/† denotes equal contribution.
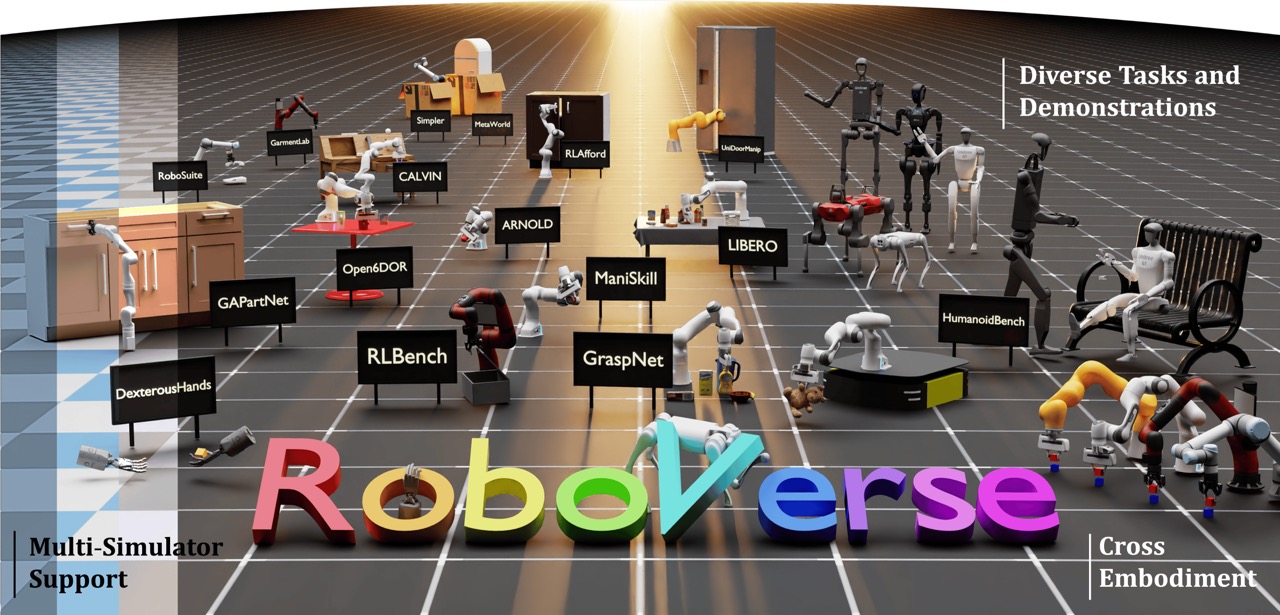
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Haoran Geng*, Feishi Wang*, Songlin Wei*, Yuyang Li*, Bangjun Wang*, Boshi An*, Charlie Tianyue Cheng*, Haozhe Lou, Peihao Li, Yen-Jen Wang, Yutong Liang, Dylan Goetting, Chaoyi Xu, Haozhe Chen, Yuxi Qian, Yiran Geng, Jiageng Mao, Weikang Wan, Mingtong Zhang, Jiangran Lyu, Siheng Zhao, Jiazhao Zhang, Jialiang Zhang, Chengyang Zhao, Haoran Lu, Yufei Ding, Ran Gong, Yuran Wang, Yuxuan Kuang, Ruihai Wu, Baoxiong Jia, Carlo Sferrazza, Hao Dong, Siyuan Huang, Koushil Sreenath, Yue Wang, Jitendra Malik, Pieter Abbeel
RSS 2025
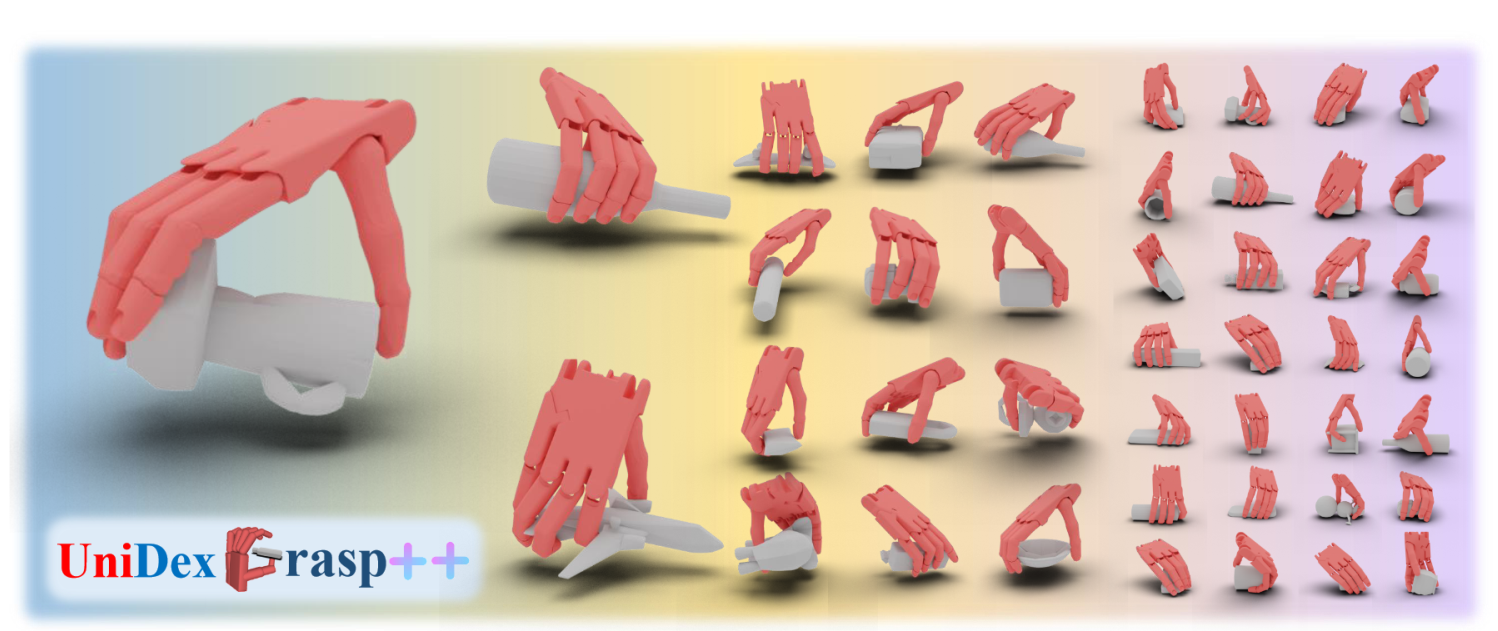
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
Yinzhen Xu*, Weikang Wan*, Jialiang Zhang*, Haoran Liu*, Zikang Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi Chen, Tengyu Liu, Li Yi, He Wang
CVPR 2023
Experience
Sep 2024 – Present
Research Assistant · La Jolla, CA
Co-advised by Prof. Hao Su and Prof. Henrik I. Christensen. Developing policy- and world-model-learning algorithms for contact-rich real-world manipulation.
Jan 2024 – Aug 2024
Research Intern · Santa Clara, CA
Advised by Dr. Jim Fan and Prof. Yuke Zhu. Built a large-scale automated synthetic-data-generation pipeline for bimanual dexterous manipulation.
Jun 2023 – Dec 2023
UT Austin, RPL Lab
Visiting Research Assistant · Austin, TX
Advised by Prof. Yuke Zhu. Developed a continual-learning algorithm for lifelong, long-horizon robot manipulation via unsupervised skill discovery.
Dec 2022 – Jul 2023
Carnegie Mellon University, Robotics Institute
Visiting Research Assistant · Pittsburgh, PA
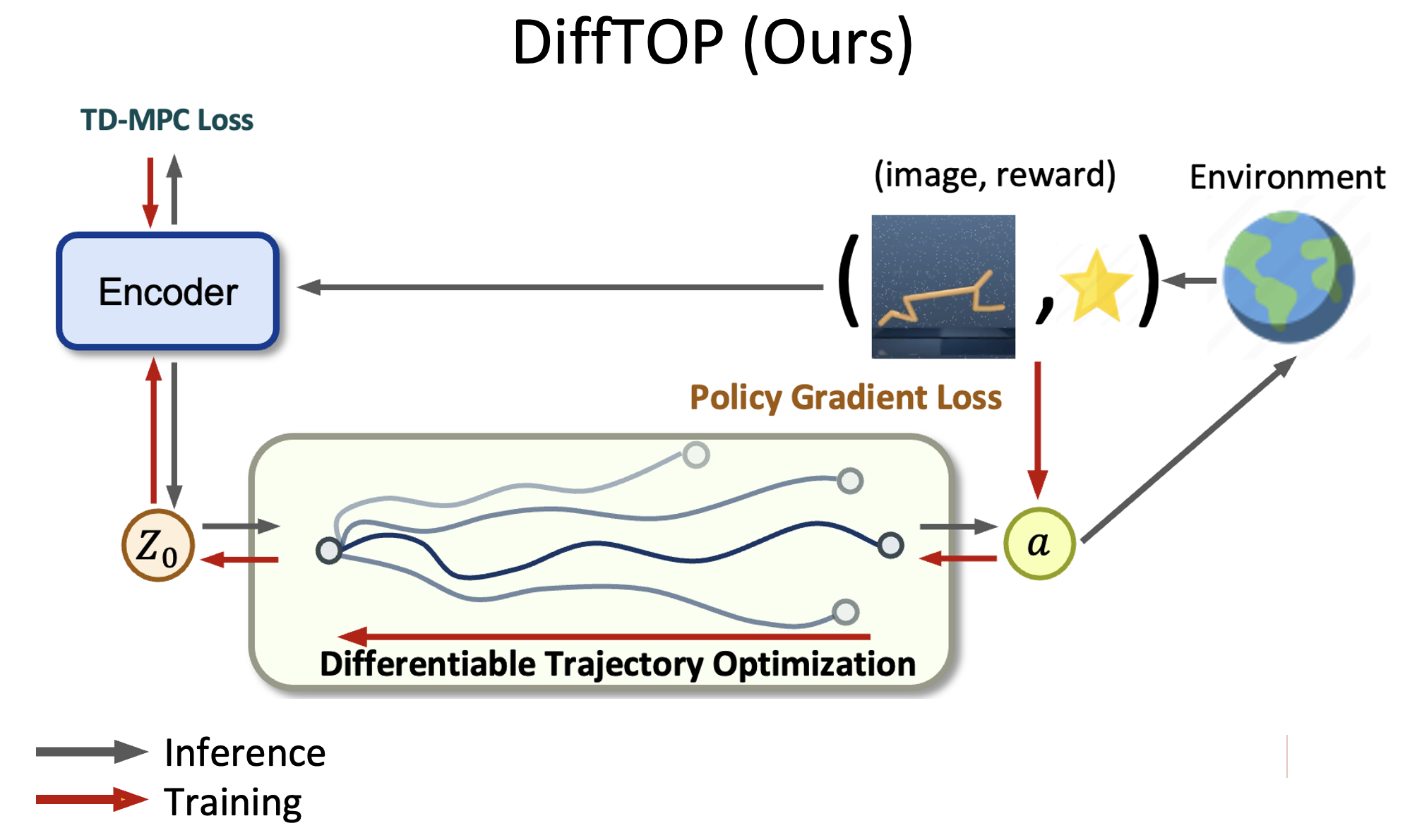
Co-advised by Prof. Zackory Erickson and Prof. David Held. Designed an end-to-end unified differentiable trajectory-optimization algorithm for deep reinforcement and imitation learning.
May 2021 – May 2024
Research Assistant · Beijing, China
Advised by Prof. He Wang. Built a learning-based generalizable dexterous-grasping system using generative models and large-scale reinforcement learning; designed vision-language-action (VLA) models with spatial intelligence.