Iterative Deepening Search (IDS) in AI (original) (raw)
Last Updated : 23 Jul, 2025
Artificial Intelligence (AI) encompasses various search algorithms to solve problems efficiently. One such algorithm, Iterative Deepening Search (IDS) also known as Iterative Deepening Depth-First Search (IDDFS), combines the advantages of both Depth-First Search (DFS) and Breadth-First Search (BFS). It is particularly useful in situations where the depth of the solution is unknown.
**In this article, we'll explore what iterative deepening search is, its significance in AI, how it works, its pros and cons, and use cases.
Table of Content
- Introduction to Iterative Deepening Search
- How Iterative Deepening Search Works
- Implementing Iterative Deepening Search for Complex Robot Navigation
- Why Use Iterative Deepening Search?
- Advantages of Iterative Deepening Search
- Disadvantages of Iterative Deepening Search
- Use Cases of Iterative Deepening Search in AI
- Conclusion
Introduction to Iterative Deepening Search
Iterative Deepening Search (IDS) is a search algorithm used in AI that blends the completeness of Breadth-First Search (BFS) with the space efficiency of Depth-First Search (DFS). IDS explores a graph or a tree by progressively increasing the depth limit with each iteration, effectively performing a series of DFS operations until the goal node is found.
This approach is particularly advantageous when the depth of the solution is unknown, and we aim to achieve both optimality and completeness without excessive memory usage.
How Iterative Deepening Search Works
The core concept of IDS revolves around repeatedly running a depth-limited DFS up to increasing depth levels. It starts with a depth limit of zero, then increments this limit iteratively. Each iteration performs a DFS search up to the current depth limit.
Here’s a step-by-step breakdown of the algorithm:
- **Start at the Root Node: Begin the search from the root node (or starting point).
- **Perform DFS with Depth Limit (L): In each iteration, perform a DFS with a depth limit
L. - **Increment Depth: After each iteration, increment
Lby 1. - **Repeat: Continue this process until the goal node is found or the search space is exhausted.
Pseudo-code Example:
IterativeDeepeningSearch(root, goal)
for depth = 0 to ∞ do
result = DepthLimitedSearch(root, goal, depth)
if result == found then
return result
Implementing Iterative Deepening Search for Complex Robot Navigation
**Step 1: Import Required Libraries
We begin by importing the necessary Python libraries. We use matplotlib to visualize the grid and path, and numpy to work with the grid as a numerical array.
import matplotlib.pyplot as plt
import numpy as np
**Step 2: Define Movement Directions
We define the possible movement directions for the robot. The robot can move in four directions: up, down, left, and right. These are represented as tuples of (x, y) coordinate changes.
Define directions for robot movement (up, down, left, right)
DIRECTIONS = [(0, 1), (0, -1), (1, 0), (-1, 0)]
**Step 3: Define a Function to Check Validity of a Move
The is_valid function checks if the next position in the grid is within bounds and not an obstacle. It returns True if the move is valid, otherwise False.
Utility to check if a position is within bounds and not an obstacle
def is_valid(grid, position):
x, y = position
if 0 <= x < len(grid) and 0 <= y < len(grid[0]) and grid[x][y] != 1:
return True
return False
**Step 4: Implement the Iterative Deepening Depth-First Search (IDDFS) Algorithm
The iddfs function performs the search. It uses a helper function dls (Depth-Limited Search) to explore the grid up to a specified depth and returns the path if the goal is found.
Iterative Deepening Depth-First Search (IDDFS) Implementation
def iddfs(grid, start, goal):
def dls(node, depth, path):
if node == goal:
return path
if depth == 0:
return None
for direction in DIRECTIONS:
new_x, new_y = node[0] + direction[0], node[1] + direction[1]
next_node = (new_x, new_y)
if is_valid(grid, next_node) and next_node not in path:
result = dls(next_node, depth - 1, path + [next_node])
if result:
return result
return None
depth = 0
while True:
result = dls(start, depth, [start])
if result:
return result
depth += 1**Step 5: Define the Grid with Obstacles
We create a grid where 0 represents an open path and 1 represents obstacles. The grid is more complex, which makes it a challenging navigation problem for the robot.
Create a more complex grid (0: open space, 1: obstacle)
grid = [
[0, 0, 1, 0, 1, 1, 0, 0, 1, 0],
[1, 0, 1, 0, 1, 0, 0, 1, 1, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 1, 1, 1, 1, 0, 1, 1, 1, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 1, 0],
[1, 1, 0, 1, 1, 1, 1, 0, 1, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[1, 1, 0, 1, 1, 1, 0, 1, 1, 1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[1, 1, 1, 1, 1, 1, 0, 1, 1, 0]
]
start = (0, 0) # Starting position of the robot
goal = (9, 9) # Goal position
**Step 6: Perform the Search to Find the Path
We now call the iddfs function to perform the search from the start position to the goal position and print the found path.
Perform IDDFS
path = iddfs(grid, start, goal)
print("Path found:", path)
**Step 7: Visualize the Path
Finally, we create a function visualize_path that uses matplotlib to visualize the grid and the robot's path. The path is drawn in red, the start position is marked in green, and the goal position is marked in blue.
Visualization Code
def visualize_path(grid, path):
grid_size = (len(grid), len(grid[0]))
grid_visual = np.array(grid)
# Plot grid with obstacles
plt.imshow(grid_visual, cmap='binary', origin='upper')
# Highlight the path with a red line
path_x = [x for x, y in path]
path_y = [y for x, y in path]
plt.plot(path_y, path_x, color='red', linewidth=2, marker='o')
# Mark start and goal
plt.text(start[1], start[0], 'S', fontsize=12, ha='center', va='center', color='green', fontweight='bold')
plt.text(goal[1], goal[0], 'G', fontsize=12, ha='center', va='center', color='blue', fontweight='bold')
# Grid labels and layout
plt.grid(True)
plt.xticks(range(grid_size[1]))
plt.yticks(range(grid_size[0]))
plt.gca().invert_yaxis() # To align origin at top-left corner like a typical grid
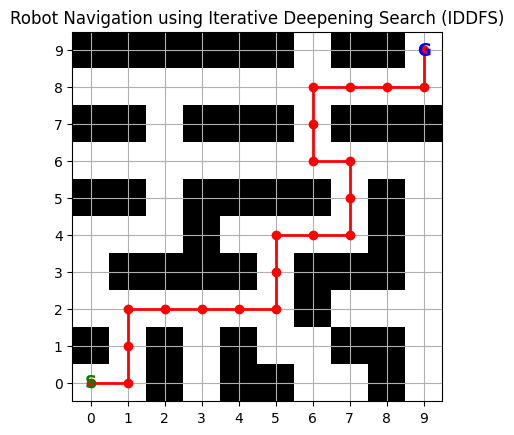
plt.title("Robot Navigation using Iterative Deepening Search (IDDFS)")
plt.show()Visualize the result
visualize_path(grid, path)
Complete Code: Implementing Iterative Deepening Search for Complex Robot Navigation
Python `
import matplotlib.pyplot as plt import numpy as np
Define directions for robot movement (up, down, left, right)
DIRECTIONS = [(0, 1), (0, -1), (1, 0), (-1, 0)]
Utility to check if a position is within bounds and not an obstacle
def is_valid(grid, position): x, y = position if 0 <= x < len(grid) and 0 <= y < len(grid[0]) and grid[x][y] != 1: return True return False
Iterative Deepening Depth-First Search (IDDFS) Implementation
def iddfs(grid, start, goal): def dls(node, depth, path): if node == goal: return path if depth == 0: return None for direction in DIRECTIONS: new_x, new_y = node[0] + direction[0], node[1] + direction[1] next_node = (new_x, new_y) if is_valid(grid, next_node) and next_node not in path: result = dls(next_node, depth - 1, path + [next_node]) if result: return result return None
depth = 0
while True:
result = dls(start, depth, [start])
if result:
return result
depth += 1Create a more complex grid (0: open space, 1: obstacle)
grid = [ [0, 0, 1, 0, 1, 1, 0, 0, 1, 0], [1, 0, 1, 0, 1, 0, 0, 1, 1, 0], [0, 0, 0, 0, 0, 0, 1, 0, 0, 0], [0, 1, 1, 1, 1, 0, 1, 1, 1, 0], [0, 0, 0, 1, 0, 0, 0, 0, 1, 0], [1, 1, 0, 1, 1, 1, 1, 0, 1, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [1, 1, 0, 1, 1, 1, 0, 1, 1, 1], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [1, 1, 1, 1, 1, 1, 0, 1, 1, 0] ]
start = (0, 0) # Starting position of the robot goal = (9, 9) # Goal position
Perform IDDFS
path = iddfs(grid, start, goal) print("Path found:", path)
Visualization Code
def visualize_path(grid, path): grid_size = (len(grid), len(grid[0])) grid_visual = np.array(grid)
# Plot grid with obstacles
plt.imshow(grid_visual, cmap='binary', origin='upper')
# Highlight the path with a red line
path_x = [x for x, y in path]
path_y = [y for x, y in path]
plt.plot(path_y, path_x, color='red', linewidth=2, marker='o')
# Mark start and goal
plt.text(start[1], start[0], 'S', fontsize=12, ha='center', va='center', color='green', fontweight='bold')
plt.text(goal[1], goal[0], 'G', fontsize=12, ha='center', va='center', color='blue', fontweight='bold')
# Grid labels and layout
plt.grid(True)
plt.xticks(range(grid_size[1]))
plt.yticks(range(grid_size[0]))
plt.gca().invert_yaxis() # To align origin at top-left corner like a typical grid
plt.title("Robot Navigation using Iterative Deepening Search (IDDFS)")
plt.show()Visualize the result
visualize_path(grid, path)
`
**Output:
Path found: [(0, 0), (0, 1), (1, 1), (2, 1), (2, 2), (2, 3), (2, 4), (2, 5), (3, 5), (4, 5), (4, 6), (4, 7), (5, 7), (6, 7), (6, 6), (7, 6), (8, 6), (8, 7), (8, 8), (8, 9), (9, 9)]
Why Use Iterative Deepening Search?
IDS is designed to overcome the trade-offs between BFS and DFS. Here’s why it stands out:
- **Space Efficiency: IDS requires only O(bd) space, where
bis the branching factor anddis the depth of the goal node. This is because it uses DFS, which stores only the current path. - **Optimality: In uniform-cost or unweighted graphs, IDS guarantees finding the shortest path (minimum depth solution), similar to BFS.
- **Completeness: If the search tree is finite, IDS guarantees that it will find the solution if one exists.
Advantages of Iterative Deepening Search
- **Memory Efficiency: Since IDS utilizes DFS for each iteration, it consumes far less memory than BFS, making it suitable for problems with large search spaces.
- **Optimality in Unweighted Graphs: IDS ensures finding the shallowest goal node, making it an optimal choice for certain types of problems.
- **Complete Search: Like BFS, IDS ensures that if there is a solution, it will be found eventually, as long as the search space is finite.
- **Effective for Deep Trees: In scenarios where the goal node lies deep within a large search tree, IDS efficiently finds the solution without excessive memory overhead.
Disadvantages of Iterative Deepening Search
- **Recomputing Effort: A significant drawback is that IDS repeatedly re-explores the same nodes for increasing depth limits. For example, the root node is explored multiple times as the depth limit increases. This leads to redundant computations.
- **Higher Time Complexity: Although the space complexity is low, the time complexity is higher than DFS or BFS. The time complexity of IDS is O(b^d), where
bis the branching factor anddis the depth of the solution. The repeated exploration adds overhead to the total computational time. - **Inefficient for Weighted Graphs: IDS does not perform well with weighted graphs where the cost of traversing edges differs, as it focuses on uniform depth rather than path cost.
Use Cases of Iterative Deepening Search in AI
IDS is particularly useful in AI applications where both memory efficiency and finding the shortest solution path are crucial. Here are a few notable use cases:
- **Game AI (Chess, Go): IDS is widely used in game AI where the search space is vast, and the solution depth is unpredictable. Game trees with millions of possible states are explored more efficiently using IDS.
- **Pathfinding Algorithms: IDS can be employed in real-time pathfinding scenarios, especially in cases where the destination's depth in the search space is unknown, such as robot navigation.
- **Search Engines: IDS can be applied in crawling strategies for search engines, where it’s essential to balance memory consumption while ensuring all relevant results are discovered.
- **Puzzle Solving (e.g., 8-puzzle): In AI, solving puzzles where the optimal solution requires traversing multiple states can benefit from IDS, as it efficiently handles the exponential growth of possible states.
Conclusion
Iterative Deepening Search stands as a robust algorithm that bridges the gap between Depth-First Search and Breadth-First Search. Its ability to provide memory efficiency while maintaining completeness and optimality makes it an essential tool in the AI search algorithm toolkit. However, it comes with trade-offs, particularly regarding computational time. In fields like game AI and pathfinding, where depth is unknown but optimal solutions are required, IDS proves its value.