Find Simple Closed Path for a given set of points (original) (raw)
Last Updated : 23 Jul, 2025
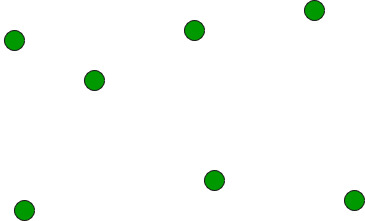
Given a set of points, connect the dots without crossing.
Example:
Input: points[] = {(0, 3), (1, 1), (2, 2), (4, 4), (0, 0), (1, 2), (3, 1}, {3, 3}};
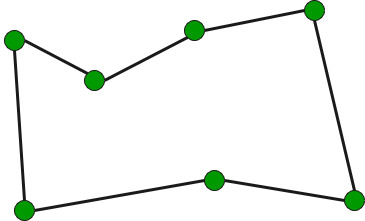
Output: Connecting points in following order would not cause any crossing {(0, 0), (3, 1), (1, 1), (2, 2), (3, 3), (4, 4), (1, 2), (0, 3)}
We strongly recommend you to minimize your browser and try this yourself first.
The idea is to use sorting.
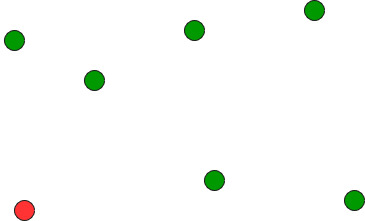
- Find the bottom-most point by comparing y coordinate of all points. If there are two points with same y value, then the point with smaller x coordinate value is considered. Put the bottom-most point at first position.
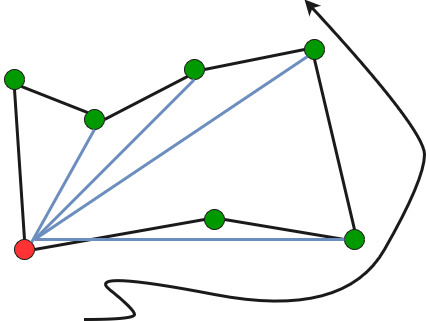
- Consider the remaining n-1 points and sort them by polar angle in counterclockwise order around points[0]. If polar angle of two points is same, then put the nearest point first.
- Traversing the sorted array (sorted in increasing order of angle) yields simple closed path.
How to compute angles?
One solution is to use trigonometric functions.
Observation: We don’t care about the actual values of the angles. We just want to sort by angle.
Idea: Use the orientation to compare angles without actually computing them!
Below is C++ implementation of above idea.
C++ `
// A C++ program to find simple closed path for n points // for explanation of orientation() #include <bits/stdc++.h> using namespace std;
struct Point { int x, y; };
// A global point needed for sorting points with reference // to the first point. Used in compare function of qsort() Point p0;
// A utility function to swap two points int swap(Point &p1, Point &p2) { Point temp = p1; p1 = p2; p2 = temp; }
// A utility function to return square of distance between // p1 and p2 int dist(Point p1, Point p2) { return (p1.x - p2.x)(p1.x - p2.x) + (p1.y - p2.y)(p1.y - p2.y); }
// To find orientation of ordered triplet (p, q, r). // The function returns following values // 0 --> p, q and r are collinear // 1 --> Clockwise // 2 --> Counterclockwise int orientation(Point p, Point q, Point r) { int val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y);
if (val == 0) return 0; // collinear
return (val > 0)? 1: 2; // clockwise or counterclock wise}
// A function used by library function qsort() to sort // an array of points with respect to the first point int compare(const void *vp1, const void *vp2) { Point *p1 = (Point *)vp1; Point *p2 = (Point *)vp2;
// Find orientation int o = orientation(p0, *p1, *p2); if (o == 0) return (dist(p0, *p2) >= dist(p0, *p1))? -1 : 1;
return (o == 2)? -1: 1; }
// Prints simple closed path for a set of n points. void printClosedPath(Point points[], int n) { // Find the bottommost point int ymin = points[0].y, min = 0; for (int i = 1; i < n; i++) { int y = points[i].y;
// Pick the bottom-most. In case of tie, choose the
// left most point
if ((y < ymin) || (ymin == y &&
points[i].x < points[min].x))
ymin = points[i].y, min = i;}
// Place the bottom-most point at first position swap(points[0], points[min]);
// Sort n-1 points with respect to the first point. // A point p1 comes before p2 in sorted output if p2 // has larger polar angle (in counterclockwise // direction) than p1 p0 = points[0]; qsort(&points[1], n-1, sizeof(Point), compare);
// Now stack has the output points, print contents // of stack for (int i=0; i<n; i++) cout << "(" << points[i].x << ", " << points[i].y <<"), "; }
// Driver program to test above functions int main() { Point points[] = {{0, 3}, {1, 1}, {2, 2}, {4, 4}, {0, 0}, {1, 2}, {3, 1}, {3, 3}}; int n = sizeof(points)/sizeof(points[0]); printClosedPath(points, n); return 0; }
Java
import java.util.*;
class Point { int x, y; Point(int x, int y) { this.x = x; this.y = y; } }
class ConvexHull { static Point p0;
static void swap(Point p1, Point p2) {
Point temp = p1;
p1 = p2;
p2 = temp;
}
static int dist(Point p1, Point p2) {
return (int)Math.pow(p1.x - p2.x, 2) +
(int)Math.pow(p1.y - p2.y, 2);
}
static int orientation(Point p, Point q, Point r) {
int val = (q.y - p.y) * (r.x - q.x) -
(q.x - p.x) * (r.y - q.y);
if (val == 0) return 0; // collinear
return (val > 0)? 1: 2;
}
static int compare(Point p1, Point p2) {
int o = orientation(p0, p1, p2);
if (o == 0)
return (dist(p0, p2) >= dist(p0, p1))? -1 : 1;
return (o == 2)? -1: 1;
}
static void printClosedPath(Point points[], int n) {
int ymin = points[0].y, min = 0;
for (int i = 1; i < n; i++) {
int y = points[i].y;
if ((y < ymin) || (ymin == y &&
points[i].x < points[min].x))
ymin = points[i].y;
min = i;
}
swap(points[0], points[min]);
p0 = points[0];
Arrays.sort(points, 1, n, (p1, p2) -> compare(p1, p2));
for (int i=0; i<n; i++)
System.out.println("(" + points[i].x + ", " + points[i].y + "), ");
}
public static void main(String[] args) {
Point[] points = {new Point(0, 3), new Point(1, 1), new Point(2, 2), new Point(4, 4),
new Point(0, 0), new Point(1, 2), new Point(3, 1), new Point(3, 3)};
int n = points.length;
printClosedPath(points, n);
}}
Python3
from functools import cmp_to_key
A Python program to find simple closed path for n points
for explanation of orientation()
A global point needed for sorting points with reference
to the first point. Used in compare function of qsort()
p0 = None
A utility function to return square of distance between
p1 and p2
def dist(p1, p2): return (p1[0] - p2[0])(p1[0] - p2[0]) + (p1[1] - p2[1])(p1[1] - p2[1])
To find orientation of ordered triplet (p, q, r).
The function returns following values
0 --> p, q and r are collinear
1 --> Clockwise
2 --> Counterclockwise
def orientation(p, q, r): val = (q[1] - p[1]) * (r[0] - q[0]) - (q[0] - p[0]) * (r[1] - q[1])
if val == 0: return 0 # collinear
return 1 if val > 0 else 2 # clockwise or counterclock wiseA function used by library function qsort() to sort
an array of points with respect to the first point
def compare(vp1, vp2): p1 = vp1 p2 = vp2
# Find orientation
o = orientation(p0, p1, p2)
if o == 0:
return -1 if dist(p0, p2) >= dist(p0, p1) else 1
return -1 if o == 2 else 1Prints simple closed path for a set of n points.
def printClosedPath(points, n): global p0 # Find the bottommost point ymin = points[0][1] min = 0 for i in range(1,n): y = points[i][1]
# Pick the bottom-most. In case of tie, choose the
# left most point
if (y < ymin) or (ymin == y and points[i][0] < points[min][0]):
ymin = points[i][1]
min = i
# Place the bottom-most point at first position
temp = points[0]
points[0] = points[min]
points[min] = temp
# Sort n-1 points with respect to the first point.
# A point p1 comes before p2 in sorted output if p2
# has larger polar angle (in counterclockwise
# direction) than p1
p0 = points[0]
points.sort(key=cmp_to_key(compare))
# Now stack has the output points, print contents
# of stack
for i in range(n):
print("(",points[i][0],",",points[i][1],"), ", end="")Driver program to test above functions
points = [[0, 3], [1, 1], [2, 2], [4, 4], [0, 0], [1, 2], [3, 1], [3, 3]] n = len(points)
printClosedPath(points, n)
C#
using System; using System.Collections.Generic;
public class Point { public int x, y; public Point(int x, int y) { this.x = x; this.y = y; } }
public class ClosestPath { static Point p0;
static int dist(Point p1, Point p2)
{
return (p1.x - p2.x) * (p1.x - p2.x)
+ (p1.y - p2.y) * (p1.y - p2.y);
}
static int orientation(Point p, Point q, Point r)
{
int val = (q.y - p.y) * (r.x - q.x)
- (q.x - p.x) * (r.y - q.y);
if (val == 0)
return 0; // collinear
return (val > 0)
? 1
: 2; // clockwise or counterclockwise
}
static int compare(Point p1, Point p2)
{
int o = orientation(p0, p1, p2);
if (o == 0)
return (dist(p0, p2) >= dist(p0, p1)) ? -1 : 1;
return (o == 2) ? -1 : 1;
}
static void printClosedPath(List<Point> points, int n)
{
// Find the bottommost point
int ymin = points[0].y;
int min = 0;
for (int i = 1; i < n; i++) {
int y = points[i].y;
if ((y < ymin)
|| (ymin == y
&& points[i].x < points[min].x)) {
ymin = points[i].y;
min = i;
}
}
// Place the bottom-most point at first position
Point temp = points[0];
points[0] = points[min];
points[min] = temp;
// Sort n-1 points with respect to the first point.
// A point p1 comes before p2 in sorted output if p2
// has larger polar angle (in counterclockwise
// direction) than p1
p0 = points[0];
points.Sort(compare);
// Now stack has the output points, print contents
// of stack
for (int i = 0; i < n; i++) {
Console.Write("(" + points[i].x + ", "
+ points[i].y + "), ");
}
}
public static void Main()
{
List<Point> points = new List<Point>() {
new Point(0, 3), new Point(1, 1),
new Point(2, 2), new Point(4, 4),
new Point(0, 0), new Point(1, 2),
new Point(3, 1), new Point(3, 3)
};
int n = points.Count;
printClosedPath(points, n);
}} // This code is contributed by user_dtewbxkn77n
JavaScript
// A javascript program to find simple closed path for n points // for explanation of orientation()
// A global point needed for sorting points with reference // to the first point. Used in compare function of qsort() let p0;
// A utility function to return square of distance between // p1 and p2 function dist(p1, p2) { return (p1[0] - p2[0])(p1[0] - p2[0]) + (p1[1] - p2[1])(p1[1] - p2[1]); }
// To find orientation of ordered triplet (p, q, r). // The function returns following values // 0 --> p, q and r are collinear // 1 --> Clockwise // 2 --> Counterclockwise function orientation(p, q, r) { let val = (q[1] - p[1]) * (r[0] - q[0]) - (q[0] - p[0]) * (r[1] - q[1]);
if (val == 0) return 0; // collinear
return (val > 0)? 1: 2; // clockwise or counterclock wise}
// A function used by library function qsort() to sort // an array of points with respect to the first point function compare(vp1, vp2) { let p1 = vp1; let p2 = vp2;
// Find orientation let o = orientation(p0, p1, p2); if (o == 0) return (dist(p0, p2) >= dist(p0, p1))? -1 : 1;
return (o == 2)? -1: 1; }
// Prints simple closed path for a set of n points. function printClosedPath(points, n) { // Find the bottommost point let ymin = points[0][1]; let min = 0; for (let i = 1; i < n; i++) { let y = points[i][1];
// Pick the bottom-most. In case of tie, choose the
// left most point
if ((y < ymin) || (ymin == y && points[i][0] < points[min][0])){
ymin = points[i][1];
min = i;
}}
// Place the bottom-most point at first position let temp = points[0]; points[0] = points[min]; points[min] = temp;
// Sort n-1 points with respect to the first point. // A point p1 comes before p2 in sorted output if p2 // has larger polar angle (in counterclockwise // direction) than p1 p0 = points[0]; points.sort(compare);
// Now stack has the output points, print contents // of stack for (let i=0; i<n; i++) console.log("(" + points[i][0] + "," + points[i][1] + "), "); }
// Driver program to test above functions let points = [[0, 3], [1, 1], [2, 2], [4, 4], [0, 0], [1, 2], [3, 1], [3, 3]]; let n = points.length;
printClosedPath(points, n);
// The code is contributed by Nidhi goel.
`
Output:
(0, 0), (3, 1), (1, 1), (2, 2), (3, 3), (4, 4), (1, 2), (0, 3),
Time complexity of above solution is O(n Log n) if we use a O(nLogn) sorting algorithm for sorting points.
Auxiliary Space: O(1), since no extra space has been taken.
Source:
https://www.dcs.gla.ac.uk/~pat/52233/slides/Geometry1x1.pdf