Shortest Path in Directed Acyclic Graph (original) (raw)
Last Updated : 24 Apr, 2026
Given a **weighted Directed Acyclic Graph (DAG) with **n nodes and **m edges, where each edge is represented as [u, v, w] (a directed edge from u to v with weight w), and a source node src, find the shortest distance from src to all other nodes.
**Note: If it is impossible to reach a node from source node, then mark the distance as **-1.
**Example:
**Input: n = 6, src = 0, edges[][] = [[0,1,2], [0,4,1], [4,5,4], [4,2,2], [1,2,3], [2,3,6], [5,3,1]]
**Output: 0 2 3 6 1 5
**Explanation:
Distance of source from itself is zero.
Node 1: Shortest path is 0 -> 1 = 2.
Node 2: Shortest path is 0 -> 4 -> 2 = 1 + 2 = 3.
Node 3: Shortest path is 0 -> 4 -> 5 -> 3 = 1 + 4 + 1 = 6.
Node 4: Shortest path is 0 -> 4 = 1.
Node 5: Shortest path is 0 -> 4 -> 5 = 1 + 4 = 5.**Input: V = 4, E = 2, edges = [[0,1,2], [0,2,1]]
**Output: [0, 2, 1, -1]
**Explanation: Shortest path from 0 to 1 is 0->1 with edge weight 2. The shortest path from 0 to 2 is 0->2 with edge weight 1. There is no way we can reach 3, so it's -1 for 3.
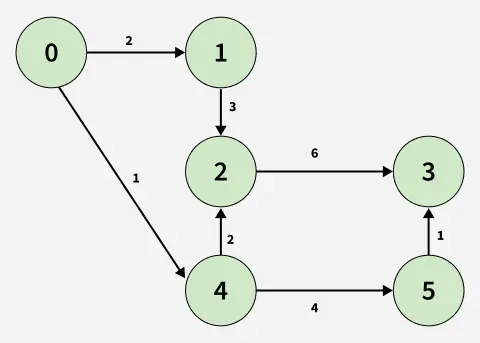
Table of Content
- [Naive Approach] Using General Purpose Algorithm
- [Expected Approach] Using Topological Sort and Edge Relaxation - O(V + E) Time O(V + E) Space
[Naive Approach] Using General Purpose Algorithm
For a general weighted graph, we can calculate single source shortest distances in O(V + E) time using Bellman–Ford Algorithm. For a graph with no negative weights, we can do better and calculate single source shortest distances in O(E + VLogV) time using Dijkstra's algorithm.
[Expected Approach] Using Topological Sort and Edge Relaxation - O(V + E) Time O(V + E) Space
**Can we do even better for Directed Acyclic Graph (DAG)?
For a **DAG, we can compute shortest paths in **O(V + E) time using topological sorting. Initialize distances (source = 0, others = ∞), get the topological order, and relax edges in that order. Since the graph has no cycles, each edge is processed once, making it the most efficient approach.
We initialize distances to all vertices as infinite and distance to source as 0, then we find a topological sorting of the graph. Topological Sorting of a graph represents a linear ordering of the graph (See below, figure). Once we have topological order (or linear representation), we one by one process all vertices in topological order. For every vertex being processed, we update distances of its adjacent using distance of current vertex.
Following is complete algorithm for finding shortest distances.
- Initialize dist[] = {INF, INF, ....} and dist[s] = 0 where s is the source vertex.
- Create a topological order of all vertices.
- Do following for every vertex u in topological order.
...........Do following for every adjacent vertex v of u
..................if (dist[v] > dist[u] + weight(u, v))
...........................dist[v] = dist[u] + weight(u, v)
C++ `
#include <bits/stdc++.h> using namespace std;
// Function to perform Topological Sort using DFS void topoSort(int node, vector& vis, stack& st, vector<vector<pair<int,int>>>& adj) {
vis[node] = 1;
// Traverse all adjacent nodes
for (auto &it : adj[node]) {
if (!vis[it.first]) {
topoSort(it.first, vis, st, adj);
}
}
// Push node to stack after visiting all neighbors
st.push(node);}
// Function to find shortest path in DAG vector shortestPath(int V, int E, vector<vector>& edges) {
// Adjacency list: {node -> {adjacent_node, weight}}
vector<vector<pair<int,int>>> adj(V);
// Build the graph from given edges
for (auto &e : edges) {
int u = e[0];
int v = e[1];
int wt = e[2];
adj[u].push_back({v, wt});
}
// Visited array for DFS
vector<int> vis(V, 0);
stack<int> st;
//Perform Topological Sort for all nodes
for (int i = 0; i < V; i++) {
if (!vis[i]) {
topoSort(i, vis, st, adj);
}
}
//Initialize distances
const int INF = 1e9;
vector<int> dist(V, INF);
dist[0] = 0;
//Process nodes in topological order
while (!st.empty()) {
int node = st.top();
st.pop();
// If node is reachable
if (dist[node] != INF) {
// Relax all adjacent edges
for (auto &it : adj[node]) {
int v = it.first;
int wt = it.second;
// Update distance if shorter path is found
if (dist[node] + wt < dist[v]) {
dist[v] = dist[node] + wt;
}
}
}
}
// Mark unreachable nodes as -1
for (int i = 0; i < V; i++) {
if (dist[i] == INF) {
dist[i] = -1;
}
}
return dist;}
int main() {
int V = 6;
int E = 7;
// Edge list: {u, v, weight}
vector<vector<int>> edges = {
{0,1,2}, {0,4,1}, {4,5,4},
{4,2,2}, {1,2,3}, {2,3,6}, {5,3,1}
};
vector<int> result = shortestPath(V, E, edges);
for (int x : result) {
cout << x << " ";
}
return 0;}
C
#include <stdio.h> #include <stdlib.h> #include <stdbool.h> #include <limits.h>
#define MAX_NODES 100
typedef struct Edge { int v, wt; } Edge;
typedef struct Node { Edge* edges; int size; } Node;
Node* adj[MAX_NODES]; int vis[MAX_NODES]; int dist[MAX_NODES];
// Function to perform Topological Sort using DFS void topoSort(int node, int vis[], int st[], int* top, Node* adj[]) { vis[node] = 1;
for (int i = 0; i < adj[node]->size; i++) {
Edge it = adj[node]->edges[i];
if (!vis[it.v]) {
topoSort(it.v, vis, st, top, adj);
}
}
st[(*top)++] = node;}
// Function to find shortest path in DAG void shortestPath(int V, int E, int edges[][3]) { // Initialize adjacency list for (int i = 0; i < V; i++) { adj[i] = (Node*)malloc(sizeof(Node)); adj[i]->edges = (Edge*)malloc(sizeof(Edge) * MAX_NODES); adj[i]->size = 0; }
// Build the graph from given edges
for (int i = 0; i < E; i++) {
int u = edges[i][0];
int v = edges[i][1];
int wt = edges[i][2];
adj[u]->edges[adj[u]->size++] = (Edge){v, wt};
}
// Visited array for DFS
for (int i = 0; i < V; i++) {
vis[i] = 0;
}
int st[V];
int top = 0;
// Perform Topological Sort for all nodes
for (int i = 0; i < V; i++) {
if (!vis[i]) {
topoSort(i, vis, st, &top, adj);
}
}
// Initialize distances
for (int i = 0; i < V; i++) {
dist[i] = INT_MAX;
}
dist[0] = 0;
// Process nodes in topological order
for (int i = top - 1; i >= 0; i--) {
int node = st[i];
// If node is reachable
if (dist[node]!= INT_MAX) {
// Relax all adjacent edges
for (int j = 0; j < adj[node]->size; j++) {
Edge it = adj[node]->edges[j];
int v = it.v;
int wt = it.wt;
// Update distance if shorter path is found
if (dist[node] + wt < dist[v]) {
dist[v] = dist[node] + wt;
}
}
}
}
// Mark unreachable nodes as -1
for (int i = 0; i < V; i++) {
if (dist[i] == INT_MAX) {
dist[i] = -1;
}
}
// Print the result
for (int i = 0; i < V; i++) {
printf("%d ", dist[i]);
}}
int main() { int V = 6; int E = 7;
// Edge list: {u, v, weight}
int edges[][3] = {
{0,1,2}, {0,4,1}, {4,5,4},
{4,2,2}, {1,2,3}, {2,3,6}, {5,3,1}
};
shortestPath(V, E, edges);
return 0;}
Java
import java.util.*;
public class GfG { // Function to perform Topological Sort using DFS static void topoSort(int node, boolean[] vis, Stack st, ArrayList<ArrayList<int[]>> adj) { vis[node] = true; // Traverse all adjacent nodes for (int[] it : adj.get(node)) { if (!vis[it[0]]) { topoSort(it[0], vis, st, adj); } } // Push node to stack after visiting all neighbors st.push(node); }
// Function to find shortest path in DAG
static int[] shortestPath(int V, int E, int[][] edges) {
// Adjacency list: {node -> {adjacent_node, weight}}
ArrayList<ArrayList<int[]>> adj = new ArrayList<>();
for (int i = 0; i < V; i++) {
adj.add(new ArrayList<>());
}
// Build the graph from given edges
for (int[] e : edges) {
int u = e[0];
int v = e[1];
int wt = e[2];
adj.get(u).add(new int[]{v, wt});
}
// Visited array for DFS
boolean[] vis = new boolean[V];
Stack<Integer> st = new Stack<>();
// Perform Topological Sort for all nodes
for (int i = 0; i < V; i++) {
if (!vis[i]) {
topoSort(i, vis, st, adj);
}
}
// Initialize distances
final int INF = (int) 1e9;
int[] dist = new int[V];
Arrays.fill(dist, INF);
dist[0] = 0;
// Process nodes in topological order
while (!st.isEmpty()) {
int node = st.pop();
// If node is reachable
if (dist[node]!= INF) {
// Relax all adjacent edges
for (int[] it : adj.get(node)) {
int v = it[0];
int wt = it[1];
// Update distance if shorter path is found
if (dist[node] + wt < dist[v]) {
dist[v] = dist[node] + wt;
}
}
}
}
// Mark unreachable nodes as -1
for (int i = 0; i < V; i++) {
if (dist[i] == INF) {
dist[i] = -1;
}
}
return dist;
}
public static void main(String[] args) {
int V = 6;
int E = 7;
int[][] edges = {{0,1,2}, {0,4,1}, {4,5,4},
{4,2,2}, {1,2,3}, {2,3,6}, {5,3,1}};
int[] result = shortestPath(V, E, edges);
for (int x : result) {
System.out.print(x + " ");
}
}}
Python
from collections import defaultdict
Function to perform Topological Sort using DFS
def topoSort(node, vis, st, adj): vis[node] = True
# Traverse all adjacent nodes
for it in adj[node]:
if not vis[it[0]]:
topoSort(it[0], vis, st, adj)
# Push node to stack after visiting all neighbors
st.append(node)Function to find shortest path in DAG
def shortestPath(V, E, edges):
# Adjacency list: {node -> {adjacent_node, weight}}
adj = defaultdict(list)
# Build the graph from given edges
for e in edges:
u, v, wt = e
adj[u].append((v, wt))
# Visited array for DFS
vis = [False] * V
st = []
# Perform Topological Sort for all nodes
for i in range(V):
if not vis[i]:
topoSort(i, vis, st, adj)
# Initialize distances
INF = 10**9
dist = [INF] * V
dist[0] = 0
# Process nodes in topological order
while st:
node = st.pop()
# If node is reachable
if dist[node]!= INF:
# Relax all adjacent edges
for v, wt in adj[node]:
# Update distance if shorter path is found
if dist[node] + wt < dist[v]:
dist[v] = dist[node] + wt
# Mark unreachable nodes as -1
for i in range(V):
if dist[i] == INF:
dist[i] = -1
return distif name == 'main': V = 6 E = 7 edges = [(0,1,2), (0,4,1), (4,5,4), (4,2,2), (1,2,3), (2,3,6), (5,3,1)] result = shortestPath(V, E, edges) print(' '.join(map(str, result)))
C#
using System; using System.Collections.Generic;
class GfG { // Function to perform Topological Sort using DFS static void topoSort(int node, List vis, Stack st, List<List<Tuple<int,int>>> adj) { vis[node] = 1;
// Traverse all adjacent nodes
foreach (var it in adj[node])
{
if (vis[it.Item1] == 0)
{
topoSort(it.Item1, vis, st, adj);
}
}
// Push node to stack after visiting all neighbors
st.Push(node);
}
// Function to find shortest path in DAG
static List<int> shortestPath(int V, int E, List<List<int>> edges)
{
// Adjacency list: {node -> {adjacent_node, weight}}
List<List<Tuple<int,int>>> adj = new List<List<Tuple<int,int>>>();
for (int i = 0; i < V; i++)
{
adj.Add(new List<Tuple<int,int>>(V));
}
// Build the graph from given edges
foreach (var e in edges)
{
int u = e[0];
int v = e[1];
int wt = e[2];
adj[u].Add(new Tuple<int,int>(v, wt));
}
// Visited array for DFS
List<int> vis = new List<int>(V);
for (int i = 0; i < V; i++)
{
vis.Add(0);
}
Stack<int> st = new Stack<int>();
//Perform Topological Sort for all nodes
for (int i = 0; i < V; i++)
{
if (vis[i] == 0)
{
topoSort(i, vis, st, adj);
}
}
//Initialize distances
const int INF = 1000000000;
List<int> dist = new List<int>(V);
for (int i = 0; i < V; i++)
{
dist.Add(INF);
}
dist[0] = 0;
//Process nodes in topological order
while (st.Count > 0)
{
int node = st.Pop();
// If node is reachable
if (dist[node]!= INF)
{
// Relax all adjacent edges
foreach (var it in adj[node])
{
int v = it.Item1;
int wt = it.Item2;
// Update distance if shorter path is found
if (dist[node] + wt < dist[v])
{
dist[v] = dist[node] + wt;
}
}
}
}
// Mark unreachable nodes as -1
for (int i = 0; i < V; i++)
{
if (dist[i] == INF)
{
dist[i] = -1;
}
}
return dist;
}
static void Main(string[] args)
{
int V = 6;
int E = 7;
// Edge list: {u, v, weight}
List<List<int>> edges = new List<List<int>>()
{
new List<int> {0,1,2},
new List<int> {0,4,1},
new List<int> {4,5,4},
new List<int> {4,2,2},
new List<int> {1,2,3},
new List<int> {2,3,6},
new List<int> {5,3,1}
};
List<int> result = shortestPath(V, E, edges);
foreach (int x in result)
{
Console.Write(x + " ");
}
}}
JavaScript
function topoSort(node, vis, st, adj) { vis[node] = 1;
// Traverse all adjacent nodes
for (let it of adj[node]) {
if (!vis[it[0]]) {
topoSort(it[0], vis, st, adj);
}
}
// Push node to stack after visiting all neighbors
st.push(node);}
// Function to find shortest path in DAG function shortestPath(V, E, edges) {
// Adjacency list: {node -> {adjacent_node, weight}}
let adj = Array.from({length: V}, () => []);
// Build the graph from given edges
for (let e of edges) {
let u = e[0];
let v = e[1];
let wt = e[2];
adj[u].push([v, wt]);
}
// Visited array for DFS
let vis = Array(V).fill(0);
let st = [];
//Perform Topological Sort for all nodes
for (let i = 0; i < V; i++) {
if (!vis[i]) {
topoSort(i, vis, st, adj);
}
}
//Initialize distances
const INF = 1e9;
let dist = Array(V).fill(INF);
dist[0] = 0;
//Process nodes in topological order
while (st.length > 0) {
let node = st.pop();
// If node is reachable
if (dist[node]!== INF) {
// Relax all adjacent edges
for (let it of adj[node]) {
let v = it[0];
let wt = it[1];
// Update distance if shorter path is found
if (dist[node] + wt < dist[v]) {
dist[v] = dist[node] + wt;
}
}
}
}
// Mark unreachable nodes as -1
for (let i = 0; i < V; i++) {
if (dist[i] === INF) {
dist[i] = -1;
}
}
return dist;}
let V = 6; let E = 7;
// Edge list: {u, v, weight} let edges = [ [0,1,2], [0,4,1], [4,5,4], [4,2,2], [1,2,3], [2,3,6], [5,3,1] ];
let result = shortestPath(V, E, edges); for (let x of result) { console.log(x + " "); }
`
**Time Complexity: O(V + E), we perform topological sort and relax each edge once
**Space Complexity: O(V + E) , for graph storage and distance array