Shortest Path in a Binary Maze (original) (raw)
Given a binary matrix **mat[][] of size **n × m containing values 0 and 1, and a source cell **src[] and destination cell **dest[], find the minimum number of steps required to reach the destination cell from the source cell. From any cell, you can move to its adjacent cells in the up, down, left, and right directions.
- 1 represents a traversable cell.
- 0 represents a blocked cell that cannot be visited.
If the destination cannot be reached from the source, return -1.
**Example:
**Input: mat[][] = {{1, 1, 1, 1},{1, 1, 0, 1},{1, 1, 1, 1},{1, 1, 0, 0},{1, 0, 0, 1}}, src[] = {0, 1}, dest[] = {2, 2}
**Output: 3
**Explanation: From (0,1), the minimum number of steps to reach (2,2) is 3,
**Input: mat[][] = {{1, 1, 1, 1, 1},{1, 1, 1, 1, 1},{1, 1, 1, 1, 0},{1, 0, 1, 0, 1}}, src[] = {0, 0}, dest[] = {3, 4}
****Output:**-1
**Explanation: From (0,0), the destination (3,4) cannot be reached because all possible paths are blocked by 0 cells, so no valid route exists.
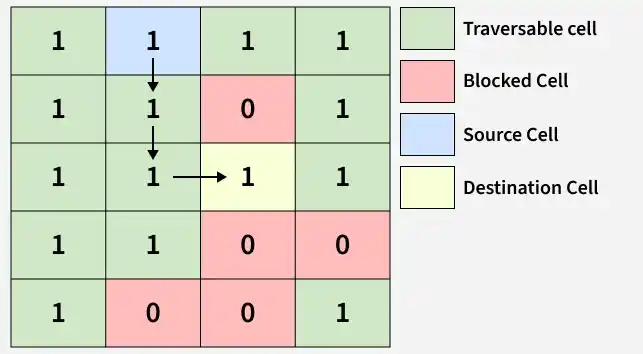
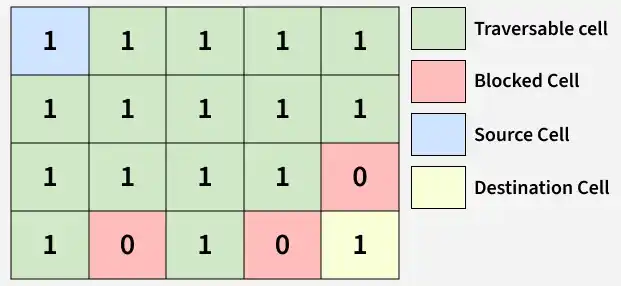
Table of Content
- [Naive Approach] Using DFS - O(4^n*m) Time and O(m × n) Space
- [Expected Approach] Using BFS - O(n × m) Time and O(n× m) Space
[Naive Approach] Using DFS - O(4^n*m) Time and O(m × n) Space
The idea is to start from the source cell and recursively explore all possible paths to reach the destination cell in the binary matrix. From any cell, we can move in four possible directions: up, down, left, and right, as long as the next cell is valid (inside the grid, not blocked, and not already visited in the current path).
We maintain a visited matrix to avoid cycles and ensure we do not revisit the same cell in a single path. A global variable minDist is used to store the minimum distance found across all possible paths.
Base Cases:
- If the current cell (x, y) is equal to the destination cell (dx, dy), we update minDist with the minimum of the current distance and return.
- If the current cell is out of bounds or blocked or already visited, we stop exploring that path.
The recurrence relation will be: **dfs(x, y) = **dfs(x+1, y) + dfs(x-1, y) + dfs(x, y+1) + dfs(x, y-1)
C++ `
#include #include #include using namespace std;
// Stores the minimum distance found from source to destination int minDist = INT_MAX;
// Function to check if a cell is safe to visit bool isSafe(vector<vector> &mat, vector<vector> &vis, int x, int y) {
int n = mat.size();
int m = mat[0].size();
// Check boundary conditions, cell value, and whether already visited
return (x >= 0 && x < n &&
y >= 0 && y < m &&
mat[x][y] == 1 &&
!vis[x][y]);}
// DFS function to explore all possible paths void dfs(vector<vector> &mat, vector<vector> &vis, int x, int y, int dx, int dy, int dist) {
// If destination is reached, update minimum distance
if (x == dx && y == dy) {
minDist = min(minDist, dist);
return;
}
// Mark current cell as visited
vis[x][y] = true;
// Possible movements: Up, Down, Left, Right
int dirX[] = {-1, 1, 0, 0};
int dirY[] = {0, 0, -1, 1};
// Try all 4 directions
for (int i = 0; i < 4; i++) {
int nx = x + dirX[i];
int ny = y + dirY[i];
// If next move is valid, continue DFS
if (isSafe(mat, vis, nx, ny)) {
dfs(mat, vis, nx, ny, dx, dy, dist + 1);
}
}
// Backtrack: unmark the cell so other paths can use it
vis[x][y] = false;}
// Wrapper function to calculate shortest path int shortestPath(vector<vector> &mat, vector &src, vector &dest) {
int n = mat.size();
int m = mat[0].size();
// If source or destination is blocked, return -1
if (mat[src[0]][src[1]] == 0 ||
mat[dest[0]][dest[1]] == 0)
return -1;
// Visited matrix to avoid cycles
vector<vector<bool>> vis(n, vector<bool>(m, false));
// Initialize minimum distance
minDist = INT_MAX;
// Start DFS from source cell
dfs(mat, vis,
src[0], src[1],
dest[0], dest[1],
0);
// If no path found, return -1
return (minDist == INT_MAX) ? -1 : minDist;}
int main() {
vector<vector<int>> mat = {
{1, 1, 1, 1},
{1, 1, 0, 1},
{1, 1, 1, 1},
{1, 1, 0, 0},
{1, 0, 0, 1}
};
vector<int> src = {0, 1};
vector<int> dest = {2, 2};
cout << shortestPath(mat, src, dest);
return 0;}
Java
import java.util.*;
class Solution {
// Stores the minimum distance found from source to destination
static int minDist = Integer.MAX_VALUE;
// Function to check if a cell is safe to visit
static boolean isSafe(int[][] mat,
boolean[][] vis,
int x, int y) {
int n = mat.length;
int m = mat[0].length;
// Check boundary conditions, cell value, and whether already visited
return (x >= 0 && x < n &&
y >= 0 && y < m &&
mat[x][y] == 1 &&
!vis[x][y]);
}
// DFS function to explore all possible paths
static void dfs(int[][] mat,
boolean[][] vis,
int x, int y,
int dx, int dy,
int dist) {
// If destination is reached, update minimum distance
if (x == dx && y == dy) {
minDist = Math.min(minDist, dist);
return;
}
// Mark current cell as visited
vis[x][y] = true;
// Possible movements: Up, Down, Left, Right
int[] dirX = {-1, 1, 0, 0};
int[] dirY = {0, 0, -1, 1};
// Try all 4 directions
for (int i = 0; i < 4; i++) {
int nx = x + dirX[i];
int ny = y + dirY[i];
// If next move is valid, continue DFS
if (isSafe(mat, vis, nx, ny)) {
dfs(mat, vis, nx, ny, dx, dy, dist + 1);
}
}
// Backtrack: unmark the cell so other paths can use it
vis[x][y] = false;
}
static int shortestPath(int[][] mat,
int[] src,
int[] dest) {
int n = mat.length;
int m = mat[0].length;
// If source or destination is blocked, return -1
if (mat[src[0]][src[1]] == 0 ||
mat[dest[0]][dest[1]] == 0)
return -1;
boolean[][] vis = new boolean[n][m];
// Initialize minimum distance
minDist = Integer.MAX_VALUE;
// Start DFS from source cell
dfs(mat, vis,
src[0], src[1],
dest[0], dest[1],
0);
// If no path found, return -1
return (minDist == Integer.MAX_VALUE) ? -1 : minDist;
}}
Python
Stores the minimum distance found from source to destination
minDist = float('inf')
Function to check if a cell is safe to visit
def isSafe(mat, vis, x, y):
n = len(mat)
m = len(mat[0])
# Check boundary conditions, cell value, and whether already visited
return (0 <= x < n and
0 <= y < m and
mat[x][y] == 1 and
not vis[x][y])DFS function to explore all possible paths
def dfs(mat, vis, x, y, dx, dy, dist):
global minDist
# If destination is reached, update minimum distance
if x == dx and y == dy:
minDist = min(minDist, dist)
return
# Mark current cell as visited
vis[x][y] = True
# Possible movements: Up, Down, Left, Right
dirX = [-1, 1, 0, 0]
dirY = [0, 0, -1, 1]
# Try all 4 directions
for i in range(4):
nx = x + dirX[i]
ny = y + dirY[i]
# If next move is valid, continue DFS
if isSafe(mat, vis, nx, ny):
dfs(mat, vis, nx, ny, dx, dy, dist + 1)
# Backtrack: unmark the cell so other paths can use it
vis[x][y] = FalseWrapper function to calculate shortest path
def shortestPath(mat, src, dest):
global minDist
n = len(mat)
m = len(mat[0])
# If source or destination is blocked
if mat[src[0]][src[1]] == 0 or mat[dest[0]][dest[1]] == 0:
return -1
# Visited matrix
vis = [[False for _ in range(m)] for _ in range(n)]
# Initialize minimum distance
minDist = float('inf')
# Start DFS from source cell
dfs(mat, vis,
src[0], src[1],
dest[0], dest[1],
0)
# If no path found
return -1 if minDist == float('inf') else minDistif name == "main":
mat = [
[1, 1, 1, 1],
[1, 1, 0, 1],
[1, 1, 1, 1],
[1, 1, 0, 0],
[1, 0, 0, 1]
]
src = [0, 1]
dest = [2, 2]
print(shortestPath(mat, src, dest))C#
using System; using System.Collections.Generic;
class GFG {
// Stores the minimum distance found from source to destination
static int minDist = Int32.MaxValue;
// Function to check if a cell is safe to visit
static bool isSafe(int[][] mat, bool[][] vis, int x, int y) {
int n = mat.Length;
int m = mat[0].Length;
// Check boundary conditions, cell value, and whether already visited
return (x >= 0 && x < n &&
y >= 0 && y < m &&
mat[x][y] == 1 &&
!vis[x][y]);
}
// DFS function to explore all possible paths
static void dfs(int[][] mat, bool[][] vis,
int x, int y,
int dx, int dy,
int dist) {
// If destination is reached, update minimum distance
if (x == dx && y == dy) {
minDist = Math.Min(minDist, dist);
return;
}
// Mark current cell as visited
vis[x][y] = true;
// Possible movements: Up, Down, Left, Right
int[] dirX = { -1, 1, 0, 0 };
int[] dirY = { 0, 0, -1, 1 };
// Try all 4 directions
for (int i = 0; i < 4; i++) {
int nx = x + dirX[i];
int ny = y + dirY[i];
// If next move is valid, continue DFS
if (isSafe(mat, vis, nx, ny)) {
dfs(mat, vis, nx, ny, dx, dy, dist + 1);
}
}
// Backtrack: unmark the cell so other paths can use it
vis[x][y] = false;
}
static int shortestPath(int[][] mat, int[] src, int[] dest) {
int n = mat.Length;
int m = mat[0].Length;
// If source or destination is blocked
if (mat[src[0]][src[1]] == 0 ||
mat[dest[0]][dest[1]] == 0)
return -1;
bool[][] vis = new bool[n][];
for (int i = 0; i < n; i++)
vis[i] = new bool[m];
minDist = Int32.MaxValue;
dfs(mat, vis,
src[0], src[1],
dest[0], dest[1],
0);
return (minDist == Int32.MaxValue) ? -1 : minDist;
}
// Main
static void Main() {
int[][] mat = new int[][] {
new int[] {1,1,1,1},
new int[] {1,1,0,1},
new int[] {1,1,1,1},
new int[] {1,1,0,0},
new int[] {1,0,0,1}
};
int[] src = {0, 1};
int[] dest = {2, 2};
Console.WriteLine(shortestPath(mat, src, dest));
}}
JavaScript
"use strict";
// Stores the minimum distance found from source to destination let minDist = Infinity;
// Function to check if a cell is safe to visit function isSafe(mat, vis, x, y) {
let n = mat.length;
let m = mat[0].length;
// Check boundary conditions, cell value, and whether already visited
return (x >= 0 && x < n &&
y >= 0 && y < m &&
mat[x][y] === 1 &&
!vis[x][y]);}
// DFS function to explore all possible paths function dfs(mat, vis, x, y, dx, dy, dist) {
// If destination is reached, update minimum distance
if (x === dx && y === dy) {
minDist = Math.min(minDist, dist);
return;
}
// Mark current cell as visited
vis[x][y] = true;
// Possible movements: Up, Down, Left, Right
let dirX = [-1, 1, 0, 0];
let dirY = [0, 0, -1, 1];
// Try all 4 directions
for (let i = 0; i < 4; i++) {
let nx = x + dirX[i];
let ny = y + dirY[i];
// If next move is valid, continue DFS
if (isSafe(mat, vis, nx, ny)) {
dfs(mat, vis, nx, ny, dx, dy, dist + 1);
}
}
// Backtrack
vis[x][y] = false;}
// Wrapper function function shortestPath(mat, src, dest) {
let n = mat.length;
let m = mat[0].length;
// If source or destination is blocked
if (mat[src[0]][src[1]] === 0 ||
mat[dest[0]][dest[1]] === 0)
return -1;
let vis = Array.from({ length: n }, () => Array(m).fill(false));
minDist = Infinity;
dfs(mat, vis,
src[0], src[1],
dest[0], dest[1],
0);
return (minDist === Infinity) ? -1 : minDist;}
// Driver code
let mat = [
[1, 1, 1, 1],
[1, 1, 0, 1],
[1, 1, 1, 1],
[1, 1, 0, 0],
[1, 0, 0, 1]
];
let src = [0, 1];
let dest = [2, 2];
console.log(shortestPath(mat, src, dest));`
[Expected Approach] Using BFS - O(n × m) Time and O(n× m) Space
The idea is to use Breadth First Search (BFS) to find the shortest path in the binary matrix. We start from the source cell and explore all reachable cells level by level using a queue.
Each queue element stores the cell coordinates along with the distance from the source. Since BFS explores all nodes at the current distance before moving to the next level, the first time we reach the destination cell, it gives the minimum number of steps.
We mark cells as visited (set them to 0) to avoid revisiting and ensure each cell is processed only once.
Base Cases:
- If the source or destination cell is blocked (0), return -1.
- If the destination is reached during BFS traversal, return the current distance. C++ `
#include #include #include using namespace std;
int shortestPath(vector<vector> &mat, vector &src, vector &dest) {
int n = mat.size();
int m = mat[0].size();
// Source or destination is blocked
if (mat[src[0]][src[1]] == 0 || mat[dest[0]][dest[1]] == 0)
return -1;
// Queue stores {cell, distance from source}
queue<pair<pair<int, int>, int>> q;
q.push({{src[0], src[1]}, 0});
// Mark source as visited
mat[src[0]][src[1]] = 0;
// Four possible directions
int dx[] = {-1, 1, 0, 0};
int dy[] = {0, 0, -1, 1};
while (!q.empty())
{
auto curr = q.front();
q.pop();
int x = curr.first.first;
int y = curr.first.second;
int dist = curr.second;
// Destination reached
if (x == dest[0] && y == dest[1])
return dist;
// Explore all four adjacent cells
for (int i = 0; i < 4; i++)
{
int nx = x + dx[i];
int ny = y + dy[i];
if (nx >= 0 && nx < n && ny >= 0 && ny < m && mat[nx][ny] == 1)
{
// Mark as visited
mat[nx][ny] = 0;
q.push({{nx, ny}, dist + 1});
}
}
}
// Destination cannot be reached
return -1;}
int main() {
vector<vector<int>> mat = {{1, 1, 1, 1}, {1, 1, 0, 1}, {1, 1, 1, 1}, {1, 1, 0, 0}, {1, 0, 0, 1}};
vector<int> src = {0, 1};
vector<int> dest = {2, 2};
cout << shortestPath(mat, src, dest);
return 0;}
Java
import java.util.Queue; import java.util.LinkedList; import java.util.Arrays;
class GFG {
int shortestPath(int[][] mat, int[] src, int[] dest)
{
int n = mat.length;
int m = mat[0].length;
// Source or destination is blocked
if (mat[src[0]][src[1]] == 0 || mat[dest[0]][dest[1]] == 0)
return -1;
// Queue stores {cell, distance from source}
Queue<int[]> q = new LinkedList<>();
q.add(new int[]{src[0], src[1], 0});
// Mark source as visited
mat[src[0]][src[1]] = 0;
// Four possible directions
int dx[] = {-1, 1, 0, 0};
int dy[] = {0, 0, -1, 1};
while (!q.isEmpty())
{
int[] curr = q.poll();
int x = curr[0];
int y = curr[1];
int dist = curr[2];
// Destination reached
if (x == dest[0] && y == dest[1])
return dist;
// Explore all four adjacent cells
for (int i = 0; i < 4; i++)
{
int nx = x + dx[i];
int ny = y + dy[i];
if (nx >= 0 && nx < n && ny >= 0 && ny < m && mat[nx][ny] == 1)
{
// Mark as visited
mat[nx][ny] = 0;
q.add(new int[]{nx, ny, dist + 1});
}
}
}
// Destination cannot be reached
return -1;
}
public static void main(String[] args)
{
int[][] mat = {
{1, 1, 1, 1},
{1, 1, 0, 1},
{1, 1, 1, 1},
{1, 1, 0, 0},
{1, 0, 0, 1}
};
int[] src = {0, 1};
int[] dest = {2, 2};
Solution obj = new Solution();
System.out.println(obj.shortestPath(mat, src, dest));
}}
Python
from collections import deque
def shortestPath(mat, src, dest):
n = len(mat)
m = len(mat[0])
# Source or destination is blocked
if mat[src[0]][src[1]] == 0 or mat[dest[0]][dest[1]] == 0:
return -1
# Queue stores {cell, distance from source}
q = deque()
q.append((src[0], src[1], 0))
# Mark source as visited
mat[src[0]][src[1]] = 0
# Four possible directions
dx = [-1, 1, 0, 0]
dy = [0, 0, -1, 1]
while q:
x, y, dist = q.popleft()
# Destination reached
if x == dest[0] and y == dest[1]:
return dist
# Explore all four adjacent cells
for i in range(4):
nx = x + dx[i]
ny = y + dy[i]
if 0 <= nx < n and 0 <= ny < m and mat[nx][ny] == 1:
# Mark as visited
mat[nx][ny] = 0
q.append((nx, ny, dist + 1))
# Destination cannot be reached
return -1if name == "main":
mat = [
[1, 1, 1, 1],
[1, 1, 0, 1],
[1, 1, 1, 1],
[1, 1, 0, 0],
[1, 0, 0, 1]
]
src = [0, 1]
dest = [2, 2]
print(shortestPath(mat, src, dest))C#
using System; using System.Collections.Generic;
class GFG { public int shortestPath(int[][] mat, int[] src, int[] dest) {
int n = mat.Length;
int m = mat[0].Length;
// Source or destination is blocked
if (mat[src[0]][src[1]] == 0 || mat[dest[0]][dest[1]] == 0)
return -1;
// Queue stores {cell, distance from source}
Queue<int[]> q = new Queue<int[]>();
q.Enqueue(new int[] { src[0], src[1], 0 });
// Mark source as visited
mat[src[0]][src[1]] = 0;
// Four possible directions
int[] dx = { -1, 1, 0, 0 };
int[] dy = { 0, 0, -1, 1 };
while (q.Count > 0)
{
int[] curr = q.Dequeue();
int x = curr[0];
int y = curr[1];
int dist = curr[2];
// Destination reached
if (x == dest[0] && y == dest[1])
return dist;
// Explore all four adjacent cells
for (int i = 0; i < 4; i++)
{
int nx = x + dx[i];
int ny = y + dy[i];
if (nx >= 0 && nx < n && ny >= 0 && ny < m && mat[nx][ny] == 1)
{
// Mark as visited
mat[nx][ny] = 0;
q.Enqueue(new int[] { nx, ny, dist + 1 });
}
}
}
// Destination cannot be reached
return -1;
}
public static void Main(string[] args)
{
int[][] mat = new int[][] {
new int[] {1, 1, 1, 1},
new int[] {1, 1, 0, 1},
new int[] {1, 1, 1, 1},
new int[] {1, 1, 0, 0},
new int[] {1, 0, 0, 1}
};
int[] src = { 0, 1 };
int[] dest = { 2, 2 };
Solution obj = new Solution();
Console.WriteLine(obj.shortestPath(mat, src, dest));
}}
JavaScript
function shortestPath(mat, src, dest) {
let n = mat.length;
let m = mat[0].length;
// Source or destination is blocked
if (mat[src[0]][src[1]] === 0 || mat[dest[0]][dest[1]] === 0)
return -1;
// Queue stores {cell, distance from source}
let q = [];
q.push([src[0], src[1], 0]);
// Mark source as visited
mat[src[0]][src[1]] = 0;
// Four possible directions
let dx = [-1, 1, 0, 0];
let dy = [0, 0, -1, 1];
while (q.length > 0)
{
let curr = q.shift();
let x = curr[0];
let y = curr[1];
let dist = curr[2];
// Destination reached
if (x === dest[0] && y === dest[1])
return dist;
// Explore all four adjacent cells
for (let i = 0; i < 4; i++)
{
let nx = x + dx[i];
let ny = y + dy[i];
if (
nx >= 0 && nx < n &&
ny >= 0 && ny < m &&
mat[nx][ny] === 1
)
{
// Mark as visited
mat[nx][ny] = 0;
q.push([nx, ny, dist + 1]);
}
}
}
// Destination cannot be reached
return -1;}
// Driver code let mat = [ [1, 1, 1, 1], [1, 1, 0, 1], [1, 1, 1, 1], [1, 1, 0, 0], [1, 0, 0, 1] ];
let src = [0, 1]; let dest = [2, 2];
console.log(shortestPath(mat, src, dest));
`