DeepStream-3D Sensor Fusion Multi-Modal Application and Framework — DeepStream documentation (original) (raw)
This deepstream-3d-lidar-sensor-fusion sample application showcases multi-modal sensor fusion pipelines for LiDAR and camera data using the DS3D framework. This application with DS3D framework could setup different LiDAR/RADAR/Camera sensor fusion models, late fusion inference pipelines with several key features.
- Camera processing pipeline leveraging DeepStream’s generic 2D video pipeline with batchMeta.
- Custom ds3d::dataloader for LiDAR capture with pre-processing options.
- Custom ds3d::databridge converts DeepStream NvBufSurface and GstNvDsPreProcessBatchMeta data into shaped based tensor data ds3d::Frame2DGuard and ds3d::FrameGuard formats, and embeds key-value pairs within ds3d::datamap.
- ds3d::mixer for efficient merging of camera, LiDAR and any sensor data into ds3d::datamap.
- ds3d::datatfiler followed by libnvds_tritoninferfilter.so for multi-modal ds3d::datamap inference and custom pre/post-processing.
- ds3d::datasink with ds3d_gles_ensemble_render for 3D detection result visualization with a multi-view display.
The deepstream-3d-lidar-sensor-fusion sample application and source code is located at app/sample_apps/deepstream-3d-lidar-sensor-fusion/ for your reference.
There are 2 multi-modal sensor fusion pipelines for LiDAR and camera data, enabling 3D detections.
Example 1. BEVFusion Multi-Modal with 6-Camera Plus 1-LiDAR Data Fusion Pipeline#
Refer to the provided instructions for the setup. DS3D BEVFusion Setup with Triton
- Processes data from 6 cameras and 1 LiDAR.
- Utilizes pre-trained PyTroch BEVFusion model, optimized for NVIDIA GPUs using TensorRT and CUDA by CUDA-BEVFusion.
- PyTriton multi-modal inference module (triton-lmm) simplifies Python model integration, allowing inclusion of any Python inference.
- The
ds3d::datatfilerbased triton inference through gRPC. - Visualizes the
ds3d::datamapthrough 6 camera views, projecting LiDAR data into each. Additionally, it provides a top view and a front view of the same LiDAR data for easier comprehension.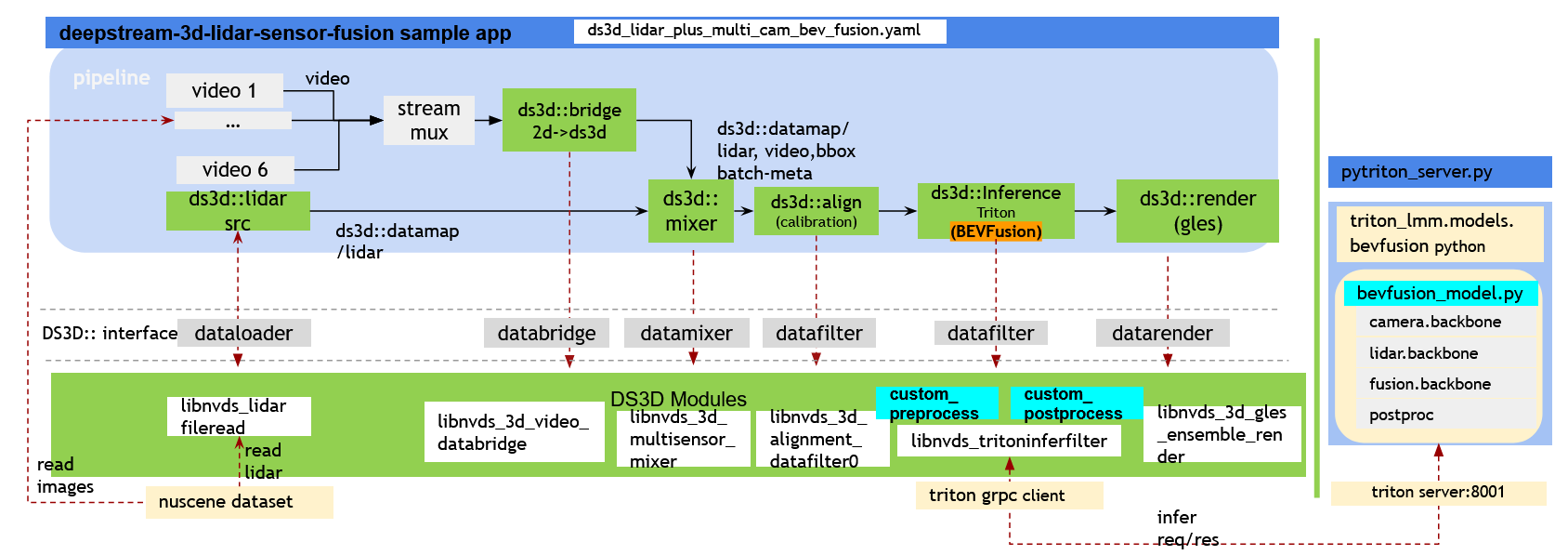
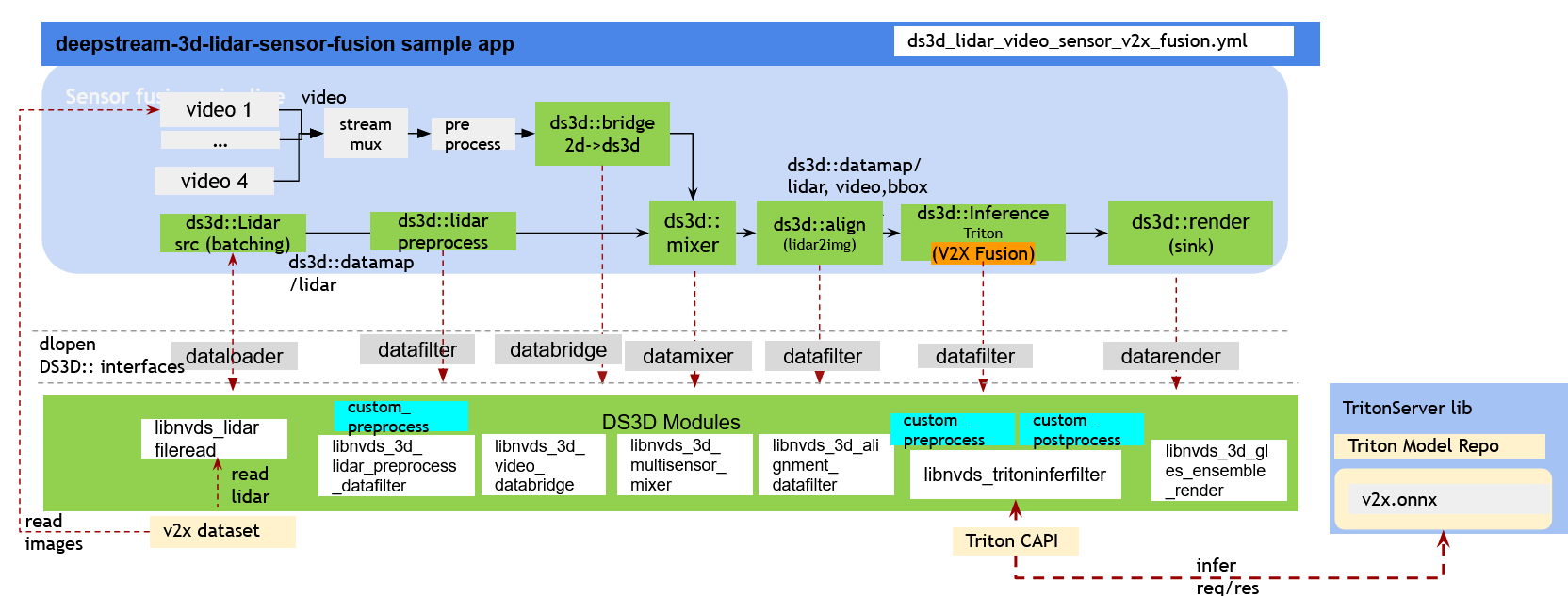
Example 2. V2XFusion multi-modal batched 4-Camera and 4-LiDAR Inference Pipeline:#
Refer to the provided instructions for the setup. DS3D V2XFusion setup
- Processes data from a single camera and a LiDAR, utilizing a batch size of 4.
- Utilizes pre-trained V2XFusion model which is based on BEVFusion and BEVHeight.
- Build the V2X ONNX model into TensorRT for GPU acceleration.
- Visualizes 4 batched camera and lidar data together into multiviews.
Quick Start#
- The following development packages must be installed.
- GStreamer-1.0
- GStreamer-1.0 Base Plugins
- GLES library
- libyaml-cpp-dev
- Download and install DeepStream SDK locally on the host. Follow instructions at page Install the DeepStream SDK with method 1 or 2 to install DeepStream SDK locally.
BEVFusion requires a local installation of DeepStream SDK which includes the scripts to build/run the container, model and dataset for ease of use. - Prerequisites before starting the container.
run cmdline outside of the container
$ export DISPLAY=0.0 # set the correct display number if DISPLAY is not exported
$ xhost +
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
make directory for dataset and model repo in host, it would be mounted into the container for bevfusion tests
$ sudo chmod -R a+rw . # Grant read/write permission for all of the files in this folder
$ mkdir -p data bevfusion/model_root
If any scripts are run outside of container, or if file read/write permission errors are experienced, please run the commands with sudo -E.
Note
Users have to run the following commandline on every terminal outside of the container or seeing errors such as xhost: unable to open display
$ export DISPLAY=0.0 # set the correct display number if DISPLAY is not exported $ xhost +
- Bevfusion and V2XFusion Setup difference.
- BEVFusion would build a new local docker image
deepstream-triton-bevfusion:{xx.xx}on top of deepstream-triton base imagenvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarchto install all CUDA-BEVFusion dependencies, build offline models, and setup triton server for gRPC remote inference on x86 dGPU. and client fusion pipeline could be running on x86 and Jetson. - V2XFusion setup instructions inside deepstream-triton base container
nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarchand inference through Triton CAPI(native) locally. It also supports Jetson test on host without container if Triton dependencies installed manually.deepstream-triton-bevfusion:{xx.xx}, {xx.xx} is from deepstream sdk major.minor version number installed on local.nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch, {xx.xx.xx} is matched from DeepStream X86 containers and DeepStream Jetson containers
- BEVFusion would build a new local docker image
BEVFusion pipeline Demo Setup#
- Prepare all required containers, inference models, sample dataset. Refer to the detailed provided instructions in DS3D BEVFusion setup
Note
All the following commandline for BEVFusion setup are run outside of the container unless other comments specified - BEVFusion pipeline Quick start.
- Option 1: build bevfusion model container, start triton server and finally run the pipeline.
Run the following commandline to build a local bevfusion model containerdeepstream-triton-bevfusion:{DS_VERSION_NUM}on x86 with dGPU.
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ bevfusion/docker_build_bevfusion_image.sh nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
Run the following commandline to download the model and build TensorRT engine files on x86 with dGPU.
$ mkdir -p bevfusion/model_root
$ bevfusion/docker_run_generate_trt_engine_models.sh bevfusion/model_root
Start triton server with the models built from last step on x86 with dGPU.
$ bevfusion/docker_run_triton_server_bevfusion.sh bevfusion/model_root
Open another terminal to start deepstream 3d sensor fusion pipeline with bevfusion config on x86.
$ export NUSCENE_DATASET_URL="https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps/raw/DS_7.1/deepstream-3d-sensor-fusion/data/nuscene.tar.gz"
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
this cmdline is also preparing the dataset for pipeline tests.
this config file would project lidar data back to camera view in display.
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion.yaml
OR
this config file would keep clear lidar and camera data in display, meanwhile show lables in each view.
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml
See more details about the instructions in DS3D BEVFusion setup- Option 2: Once users setup everything ready from Option 1, and keep tritonserver running, and make sure dataset downloaded, then users can run the cmdline inside deepstream-triton container.
Start deepstream triton container after model and dataset are ready in Option 1.export DOCKER_GPU_ARG="--runtime nvidia"for Jetson. see more details how to modify config file to setup Jetson test DS3D BEVFusion setup
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
make directory for dataset and model repo in host, it would be mounted into the container for bevfusion tests
$ mkdir -p data bevfusion/model_root
$ export DOCKER_GPU_ARG="--gpus all" # for x86export DOCKER_GPU_ARG="--runtime nvidia" # for Jetson
start the container interactively, and mount dataset and model folder into the container for tests
$ docker run $DOCKER_GPU_ARG -it --rm --ipc=host --net=host --privileged -v /tmp/.X11-unix:/tmp/.X11-unix \
-e DISPLAY=$DISPLAY \
-w /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion \
-v ./data:/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/data \
-v ./bevfusion/model_root:/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/bevfusion/model_root \
nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
Start deepstream bevfusion pipeline, run cmdline inside of the container.run cmdline inside of this container
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_plus_multi_cam_bev_fusion.yamlOr render with the 3D-bbox labels.
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml
- BEVFusion Pipeline rendering results with nuscene dataset(nuscene dataset terms of use <https://www.nuscenes.org/terms-of-use> )
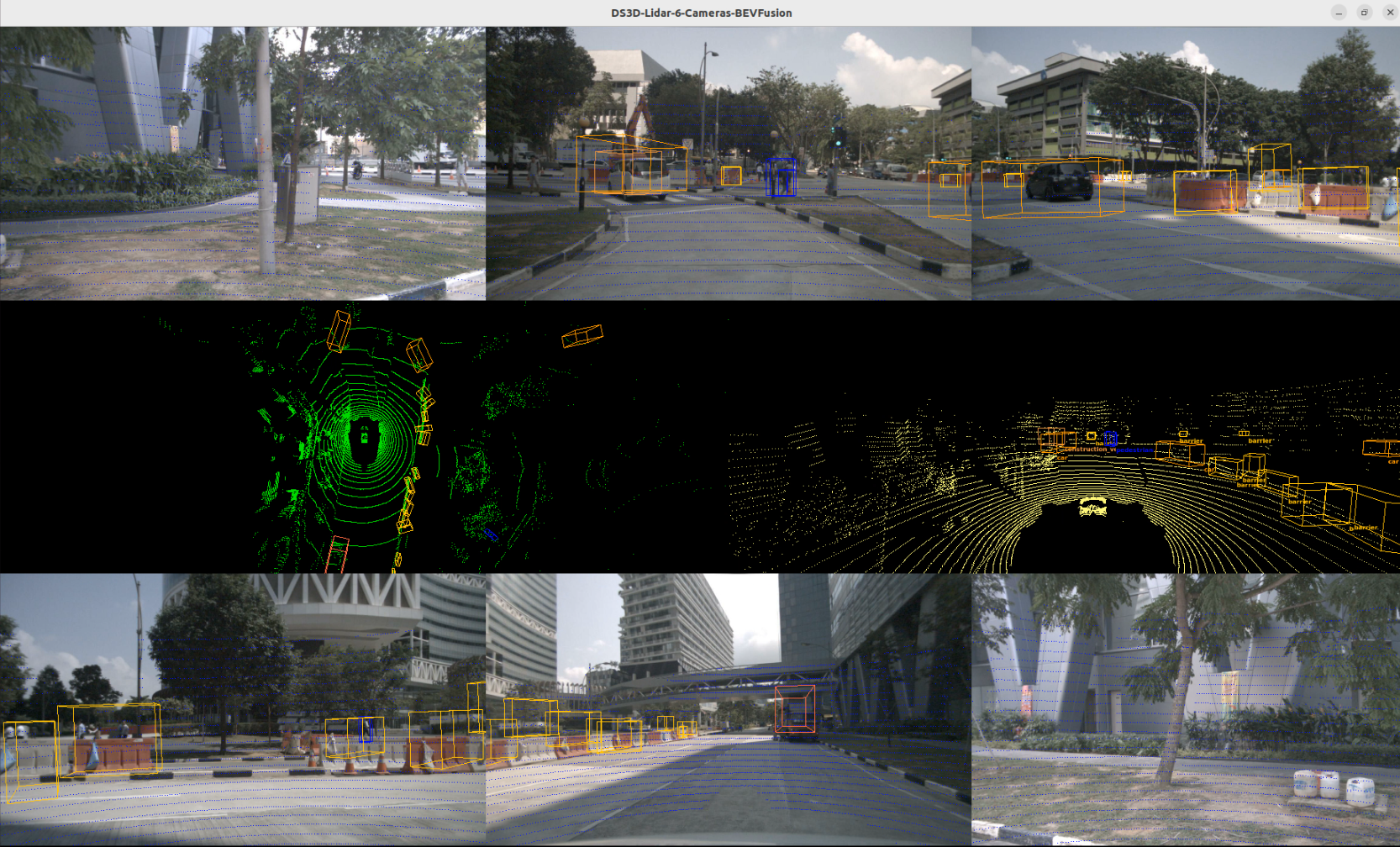
- Option 1: build bevfusion model container, start triton server and finally run the pipeline.
V2XFusion pipeline Demo Setup#
Refer to the detailed provided instructions in DS3D V2XFusion Setup
- Start the deepstream-triton base container for V2XFusion tests.
Skip this step if users have installed Triton dependencies manually on Jetson host.
running cmdline outside of the container
$ xhost +
export DOCKER_GPU_ARG="--runtime nvidia --privileged" # for Jetson Orin
$ export DOCKER_GPU_ARG="--gpus all" # for x86
start the container interactively
$ docker run $DOCKER_GPU_ARG -it --rm --ipc=host --net=host -v /tmp/.X11-unix:/tmp/.X11-unix \
-e DISPLAY=$DISPLAY \
-w /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion \
nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
{xx.xx.xx} is deepstream sdk version number
With this docker run container, the following instructions of v2XFusion setup are running inside of this container. If this step skipped on Jetson, the following instructions are running on host directly.
- Install dependencies
$ pip install gdown python-lzf # with sudo if running on Jetson host - Prepare all required inference models, optimize the models and sample dataset
Follow instructions in Download V2XFusion Models and Build TensorRT Engine Files to download the original V2X dataset.
Note: The example dataset is provided by https://thudair.baai.ac.cn/coop-forecast. For each dataset an user elects to use, the user is responsible for checking if the dataset license is fit for the intended purpose.
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/v2xfusion/scripts
$ gdown 1gjOmGEBMcipvDzu2zOrO9ex_OscUZMYY
$ ./prepare.sh dataset# with sudo if running on Jetson host - Start V2XFusion pipeline once models and dataset are ready.
run the cmdline inside deepstream-triton container
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_video_sensor_v2x_fusion.yml
- Users could see the pipeline running on display.
Build application From Source#
- To compile the sample app deepstream-3d-lidar-sensor-fusion inside of container:
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion $ make $ sudo make install (sudo not required in the case of docker containers)
Note
To compile the sources, run make with sudo -E or root permission.
DS3D Components used in this sample application#
This section describes the DS3D components used in the deepstream-3d-lidar-sensor-fusion pipeline.
LiDAR Data Loading#
ds3d::dataloader(implemented inlibnvds_lidarfileread.so)- Reads a list of LiDAR point cloud files from disk into a
ds3d::datamapformat. - Source code resides in
/opt/nvidia/deepstream/deepstream/sources/libs/ds3d/dataloader/lidarsource. - Refer to the README within that directory for compilation and installation instructions.
- See more details in DS3D Custom lib specification Custom Dataloader libnvds_lidarfileread Configuration Specifications
- Reads a list of LiDAR point cloud files from disk into a
Video Data Bridging Into DS3D ds3d::datamap#
ds3d::databridge(implemented inlibnvds_3d_video_databridge.so)- Transfers 2D video buffers into the
ds3d::datamapformat. - DeepStream expects the 2D buffer to be in
video/x-raw(memory:NVMM)format (e.g., output fromnvv4l2decoder). - See more details in DS3D databridge specification Configuration file
Note: Ads3d::datamapis a generic data structure consisting of key-value pairs. It serves as the primary input and output buffer format for components within the DeepStream ds3d framework.
- Transfers 2D video buffers into the
Data Mixing#
ds3d::datamixer(implemented inlibnvds_3d_multisensor_mixer.so)- Combines video data (2D) and LiDAR data (3D) into a single
ds3d::datamap. - The mixer operates at a user-specified frame rate. The processing speed might be limited by the slowest input source.
- See more details in DS3D mixer specification Configuration file
- Combines video data (2D) and LiDAR data (3D) into a single
LiDAR/Camera Data Alignment/Calibration Filtering#
ds3d::datafilter(implemented inlibnvds_3d_alignment_datafilter.so)- Applies a series of transformations to align the LiDAR data with the camera image coordinate system.
- See more details in DS3D Custom lib specification Custom ds3d::datafilter library: libnvds_3d_alignment_datafilter.so
LiDAR Data V2X Preprocess Filtering#
ds3d::datafilter(implemented inlibnvds_3d_lidar_preprocess_datafilter.so)- Preprocess lidar data for v2x sensor fusion model.
- See more details in DS3D Custom lib specification Custom Datafilter libnvds_3d_lidar_preprocess_datafilter Specifications
- ds3d custom point cloud data to point pillar scatter data conversion (implemented in
libnvds_3d_lidar_preprocess_datafilter.so)- Implement the V2XFusion model pointpillar scatter data conversion function to adapt to ds3d lidar preprocess ds3d::datafilter
- Refer to the /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/datafilter/lidar_preprocess/README
LiDAR/Camera Data GLES Rendering#
ds3d::datarender(implemented inlibnvds_3d_gles_ensemble_render.so)- Renders a 3D scene using OpenGL ES (GLES) with various elements (textures, LiDAR points, bounding boxes) within a single window, allowing for flexible layout customization in multi-view mode.
- See more details in alignment specification Custom datarender libnvds_3d_gles_ensemble_render Configuration Specifications
Data Inference Filtering#
ds3d::datafilter(implemented inlibnvds_tritoninferfilter.so)- Executes multi-modal data inference using the Triton Inference Server. Any data element from the
ds3d::datamapcan be forwarded to Triton. It supports both Triton CAPI and gRPC modes. Custom pre-processing and post-processing might be required depending on the specific inference task. - See more details in libnvds_tritoninferfilter Configuration Specifications
- Executes multi-modal data inference using the Triton Inference Server. Any data element from the
- ds3d custom V2XFusion model inputs preprocessing library (implemented in
libnvds_3d_v2x_infer_custom_preprocess.so)- Prepare and copy constant parameters and data for the tensor inputs of the V2XFusion model
- Copy pointpillar scatter data to the model input tensor
- Refer to /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/inference_custom_lib/ds3d_v2x_infer_custom_preprocess/README
Custom Post-Processing for LiDAR Detection#
- ds3d custom postprocessing library (implemented in
libnvds_3d_infer_postprocess_lidar_detection.so)- Performs custom post-processing operations on the sensor fusion results (3D detection objects). The interface inherits from
nvdsinferserver::IInferCustomProcessor. - Source code resides in
/opt/nvidia/deepstream/deepstream/sources/libs/ds3d/inference_custom_lib/ds3d_lidar_detection_postprocess. - Refer to the README within that directory for compilation and installation instructions.
- Performs custom post-processing operations on the sensor fusion results (3D detection objects). The interface inherits from
- ds3d custom V2XFusion outputs postprocessing library (implemented in
libnvds_3d_v2x_infer_custom_postprocess.so)- Parse the output tensor data from V2XFusion model
- Calculate 3D bboxes from the output tensor data
- Refer to /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/inference_custom_lib/ds3d_v2x_infer_custom_postprocess/README
BEVFusion Model Inference with Triton-LMM#
- triton_lmm Python module for bevfusion
- A Python module based on Triton and PyTriton, designed for multi-modal inference. It simplifies the integration of Python-based inference models into the Triton server. This sample application leverages the BEVFusion model (Python version) using this module.
- source code resides in
app/sample_apps/deepstream-3d-lidar-sensor-fusion/python/triton_lmm - Python module license Apache-2.0
DS3D Custom Components Configuration Specifications#
See more details in the DS_3D supported custom components specifications section in the DeepStream-3D Custom Apps and Libs Tutorials.