S-Function - Include S-function in model - Simulink (original) (raw)
Include S-function in model
Libraries:
Simulink / User-Defined Functions
Description
The S-Function block allows you to integrate your S-function or system function algorithms written in C, C++, or Fortran®, known as C MEX S-functions, into Simulink models. You can use the block to implement Level-1 or Level-2 C MEX S-functions. To incorporate your S-function in a model, after you compile your C MEX S-function:
- Drag an S-function block from the Simulink Library Browser to your model.
- Open up the Block Parameters dialog box and specify the S-function name at the S-function name field to provide functionality for the S-function block. For example, type
timestwoand select Apply.
An S-function is a computer language description of a Simulink® block written in MATLAB®, C, C++, or Fortran. If you have C, C++, or Fortran S-functions, they need to be compiled as MEX files using themex utility (see Build C MEX Function). S-functions define how a block works during different parts of simulation, such as initialization, update, derivatives, outputs and termination. S-functions use a special calling syntax called the S-function API that enables you to interact with the Simulink engine. This interaction is very similar to the interaction that takes place between the engine and built-in Simulink blocks. In every step of a simulation, a method is invoked by the simulation engine to fulfill a specific task.
For example, below is an example of a simple C MEX S-function calledtimestwo.c that outputs twice its input.
#define S_FUNCTION_NAME timestwo /* Specifies the name of the S-function (timestwo) */
#define S_FUNCTION_LEVEL 2 /* Specifies that the S-function is in the Level 2 format */
#include "simstruc.h" /* Defines the data structure */
static void mdlInitializeSizes(SimStruct *S) /* Initialize the input and output ports and their size */
{
ssSetNumSFcnParams(S, 0);
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; /* Parameter mismatch reported by the Simulink engine*/
}
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, DYNAMICALLY_SIZED);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S,1)) return;
ssSetOutputPortWidth(S, 0, DYNAMICALLY_SIZED);
ssSetNumSampleTimes(S, 1);
/* Take care when specifying exception free code - see sfuntmpl.doc */
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
}
static void mdlInitializeSampleTimes(SimStruct *S) /* Set the sample time of the S-function as inherited */
{
ssSetSampleTime(S, 0, INHERITED_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
}
static void mdlOutputs(SimStruct *S, int_T tid) /* Calculate the block output for each time step */
{
int_T i;
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
real_T *y = ssGetOutputPortRealSignal(S,0);
int_T width = ssGetOutputPortWidth(S,0);
for (i=0; i<width; i++) {
*y++ = 5.0 *(*uPtrs[i]);
}
}
static void mdlTerminate(SimStruct *S){} /* Perform tasks at the end of the simulation */
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endifS-functions follow a general form and can accommodate continuous, discrete, and hybrid systems. You can implement an algorithm in an S-function and use the S-Function block to add it to a Simulink model. After you write your S-function and place its name in an S-Function block (available in the User-Defined Functions block library), you can customize the user interface using masking. In this example, the timestwo.c function is compiled using mex timestwo.c, and it is implemented using the S-Function block.
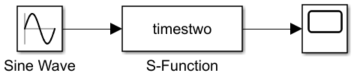
The S-Function block displays the name of the specified S-function and the number of input and output ports specified by the S-function. Signals connected to the inputs must have the dimensions specified by the S-function for the inputs.
Examples
Ports
Input
You can configure input port using the mdlInitializeSizes callback function. Use the mdlInitializeSizes function to specify number of input ports, dimension of input signals, sample time of each port, and if ports are direct feedthrough.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Output
You can configure output port using the mdlInitializeSizes callback function. Use the mdlInitializeSizes function to specify number of output ports, dimension of output signals, and sample time of each port.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | enumerated | bus
Parameters
Use this parameter to specify the name of your S-function.
Programmatic Use
To set the block parameter value programmatically, use the set_param function.
| Parameter: | FunctionName |
|---|---|
| Values: | 'system' (default) | S-function name in quotes |
Specify the additional S-function parameters.
The function parameters can be specified as MATLAB expressions or as variables separated by commas. For example:
A, B, C, D, [eye(2,2);zeros(2,2)]
Although individual parameters can be enclosed in brackets, the list of parameters must not be enclosed in brackets.
Programmatic Use
| Parameter: | Parameters |
|---|---|
| Values: | '' (default) | S-function parameters in quotes |
This parameter applies only if this block represents a C MEX S-function and you intend to use the Simulink Coder™ software to generate code from the model containing the block. If you use it, when you are ready to generate code, you must force the coder to rebuild the top model as explained in Control Regeneration of Top Model Code (Simulink Coder).
For more information on using this parameter, see Specify Additional Source Files for an S-Function (Simulink Coder).
Programmatic Use
| Parameter: | SFunctionModules |
|---|---|
| Values: | '' (default) | filenames in quotes |
Block Characteristics
| Data Types | Booleana | busa | doublea | fixed pointa | halfa | integera | singlea | stringa |
|---|---|---|---|---|---|---|---|
| Direct Feedthrough | yesa | ||||||
| Multidimensional Signals | yesa | ||||||
| Variable-Size Signals | yesa | ||||||
| Zero-Crossing Detection | yesa | ||||||
| a Actual data type or capability support depends on block implementation. |
Extended Capabilities
Actual code generation support depends on block implementation.
S-functions that call into MATLAB are not supported for code generation.
Actual data type support depends on block implementation.
See Integrate External Code (Fixed-Point Designer) for details on using fixed-point data types in S-functions.
Version History
Introduced before R2006a