Using an operational space controller — Isaac Lab Documentation (original) (raw)
Using an operational space controller#
Sometimes, controlling the end-effector pose of the robot using a differential IK controller is not sufficient. For example, we might want to enforce a very specific pose tracking error dynamics in the task space, actuate the robot with joint effort/torque commands, or apply a contact force at a specific direction while controlling the motion of the other directions (e.g., washing the surface of the table with a cloth). In such tasks, we can use an operational space controller (OSC).
References for the operational space control:
- O Khatib. A unified approach for motion and force control of robot manipulators: The operational space formulation. IEEE Journal of Robotics and Automation, 3(1):43–53, 1987. URL http://dx.doi.org/10.1109/JRA.1987.1087068.
- Robot Dynamics Lecture Notes by Marco Hutter (ETH Zurich). URL https://ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/rsl-dam/documents/RobotDynamics2017/RD_HS2017script.pdf
In this tutorial, we will learn how to use an OSC to control the robot. We will use the controllers.OperationalSpaceController class to apply a constant force perpendicular to a tilted wall surface while tracking a desired end-effector pose in all the other directions.
The Code#
The tutorial corresponds to the run_osc.py script in thescripts/tutorials/05_controllers directory.
1# Copyright (c) 2022-2025, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md). 2# All rights reserved. 3# 4# SPDX-License-Identifier: BSD-3-Clause 5 6""" 7This script demonstrates how to use the operational space controller (OSC) with the simulator. 8 9The OSC controller can be configured in different modes. It uses the dynamical quantities such as Jacobians and 10mass matricescomputed by PhysX. 11 12.. code-block:: bash 13 14 # Usage 15 ./isaaclab.sh -p scripts/tutorials/05_controllers/run_osc.py 16 17""" 18 19"""Launch Isaac Sim Simulator first.""" 20 21import argparse 22 23from isaaclab.app import AppLauncher 24 25# add argparse arguments 26parser = argparse.ArgumentParser(description="Tutorial on using the operational space controller.") 27parser.add_argument("--num_envs", type=int, default=128, help="Number of environments to spawn.") 28# append AppLauncher cli args 29AppLauncher.add_app_launcher_args(parser) 30# parse the arguments 31args_cli = parser.parse_args() 32 33# launch omniverse app 34app_launcher = AppLauncher(args_cli) 35simulation_app = app_launcher.app 36 37"""Rest everything follows.""" 38 39import torch 40 41import isaaclab.sim as sim_utils 42from isaaclab.assets import Articulation, AssetBaseCfg 43from isaaclab.controllers import OperationalSpaceController, OperationalSpaceControllerCfg 44from isaaclab.markers import VisualizationMarkers 45from isaaclab.markers.config import FRAME_MARKER_CFG 46from isaaclab.scene import InteractiveScene, InteractiveSceneCfg 47from isaaclab.sensors import ContactSensorCfg 48from isaaclab.utils import configclass 49from isaaclab.utils.math import ( 50 combine_frame_transforms, 51 matrix_from_quat, 52 quat_apply_inverse, 53 quat_inv, 54 subtract_frame_transforms, 55) 56 57## 58# Pre-defined configs 59## 60from isaaclab_assets import FRANKA_PANDA_HIGH_PD_CFG # isort:skip 61 62 63@configclass 64class SceneCfg(InteractiveSceneCfg): 65 """Configuration for a simple scene with a tilted wall.""" 66 67 # ground plane 68 ground = AssetBaseCfg( 69 prim_path="/World/defaultGroundPlane", 70 spawn=sim_utils.GroundPlaneCfg(), 71 ) 72 73 # lights 74 dome_light = AssetBaseCfg( 75 prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75)) 76 ) 77 78 # Tilted wall 79 tilted_wall = AssetBaseCfg( 80 prim_path="{ENV_REGEX_NS}/TiltedWall", 81 spawn=sim_utils.CuboidCfg( 82 size=(2.0, 1.5, 0.01), 83 collision_props=sim_utils.CollisionPropertiesCfg(), 84 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0), opacity=0.1), 85 rigid_props=sim_utils.RigidBodyPropertiesCfg(kinematic_enabled=True), 86 activate_contact_sensors=True, 87 ), 88 init_state=AssetBaseCfg.InitialStateCfg( 89 pos=(0.6 + 0.085, 0.0, 0.3), rot=(0.9238795325, 0.0, -0.3826834324, 0.0) 90 ), 91 ) 92 93 contact_forces = ContactSensorCfg( 94 prim_path="/World/envs/env_./TiltedWall", 95 update_period=0.0, 96 history_length=2, 97 debug_vis=False, 98 ) 99 100 robot = FRANKA_PANDA_HIGH_PD_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot") 101 robot.actuators["panda_shoulder"].stiffness = 0.0 102 robot.actuators["panda_shoulder"].damping = 0.0 103 robot.actuators["panda_forearm"].stiffness = 0.0 104 robot.actuators["panda_forearm"].damping = 0.0 105 robot.spawn.rigid_props.disable_gravity = True 106 107 108def run_simulator(sim: sim_utils.SimulationContext, scene: InteractiveScene): 109 """Runs the simulation loop. 110 111 Args: 112 sim: (SimulationContext) Simulation context. 113 scene: (InteractiveScene) Interactive scene. 114 """ 115 116 # Extract scene entities for readability. 117 robot = scene["robot"] 118 contact_forces = scene["contact_forces"] 119 120 # Obtain indices for the end-effector and arm joints 121 ee_frame_name = "panda_leftfinger" 122 arm_joint_names = ["panda_joint."] 123 ee_frame_idx = robot.find_bodies(ee_frame_name)[0][0] 124 arm_joint_ids = robot.find_joints(arm_joint_names)[0] 125 126 # Create the OSC 127 osc_cfg = OperationalSpaceControllerCfg( 128 target_types=["pose_abs", "wrench_abs"], 129 impedance_mode="variable_kp", 130 inertial_dynamics_decoupling=True, 131 partial_inertial_dynamics_decoupling=False, 132 gravity_compensation=False, 133 motion_damping_ratio_task=1.0, 134 contact_wrench_stiffness_task=[0.0, 0.0, 0.1, 0.0, 0.0, 0.0], 135 motion_control_axes_task=[1, 1, 0, 1, 1, 1], 136 contact_wrench_control_axes_task=[0, 0, 1, 0, 0, 0], 137 nullspace_control="position", 138 ) 139 osc = OperationalSpaceController(osc_cfg, num_envs=scene.num_envs, device=sim.device) 140 141 # Markers 142 frame_marker_cfg = FRAME_MARKER_CFG.copy() 143 frame_marker_cfg.markers["frame"].scale = (0.1, 0.1, 0.1) 144 ee_marker = VisualizationMarkers(frame_marker_cfg.replace(prim_path="/Visuals/ee_current")) 145 goal_marker = VisualizationMarkers(frame_marker_cfg.replace(prim_path="/Visuals/ee_goal")) 146 147 # Define targets for the arm 148 ee_goal_pose_set_tilted_b = torch.tensor( 149 [ 150 [0.6, 0.15, 0.3, 0.0, 0.92387953, 0.0, 0.38268343], 151 [0.6, -0.3, 0.3, 0.0, 0.92387953, 0.0, 0.38268343], 152 [0.8, 0.0, 0.5, 0.0, 0.92387953, 0.0, 0.38268343], 153 ], 154 device=sim.device, 155 ) 156 ee_goal_wrench_set_tilted_task = torch.tensor( 157 [ 158 [0.0, 0.0, 10.0, 0.0, 0.0, 0.0], 159 [0.0, 0.0, 10.0, 0.0, 0.0, 0.0], 160 [0.0, 0.0, 10.0, 0.0, 0.0, 0.0], 161 ], 162 device=sim.device, 163 ) 164 kp_set_task = torch.tensor( 165 [ 166 [360.0, 360.0, 360.0, 360.0, 360.0, 360.0], 167 [420.0, 420.0, 420.0, 420.0, 420.0, 420.0], 168 [320.0, 320.0, 320.0, 320.0, 320.0, 320.0], 169 ], 170 device=sim.device, 171 ) 172 ee_target_set = torch.cat([ee_goal_pose_set_tilted_b, ee_goal_wrench_set_tilted_task, kp_set_task], dim=-1) 173 174 # Define simulation stepping 175 sim_dt = sim.get_physics_dt() 176 177 # Update existing buffers 178 # Note: We need to update buffers before the first step for the controller. 179 robot.update(dt=sim_dt) 180 181 # Get the center of the robot soft joint limits 182 joint_centers = torch.mean(robot.data.soft_joint_pos_limits[:, arm_joint_ids, :], dim=-1) 183 184 # get the updated states 185 ( 186 jacobian_b, 187 mass_matrix, 188 gravity, 189 ee_pose_b, 190 ee_vel_b, 191 root_pose_w, 192 ee_pose_w, 193 ee_force_b, 194 joint_pos, 195 joint_vel, 196 ) = update_states(sim, scene, robot, ee_frame_idx, arm_joint_ids, contact_forces) 197 198 # Track the given target command 199 current_goal_idx = 0 # Current goal index for the arm 200 command = torch.zeros( 201 scene.num_envs, osc.action_dim, device=sim.device 202 ) # Generic target command, which can be pose, position, force, etc. 203 ee_target_pose_b = torch.zeros(scene.num_envs, 7, device=sim.device) # Target pose in the body frame 204 ee_target_pose_w = torch.zeros(scene.num_envs, 7, device=sim.device) # Target pose in the world frame (for marker) 205 206 # Set joint efforts to zero 207 zero_joint_efforts = torch.zeros(scene.num_envs, robot.num_joints, device=sim.device) 208 joint_efforts = torch.zeros(scene.num_envs, len(arm_joint_ids), device=sim.device) 209 210 count = 0 211 # Simulation loop 212 while simulation_app.is_running(): 213 # reset every 500 steps 214 if count % 500 == 0: 215 # reset joint state to default 216 default_joint_pos = robot.data.default_joint_pos.clone() 217 default_joint_vel = robot.data.default_joint_vel.clone() 218 robot.write_joint_state_to_sim(default_joint_pos, default_joint_vel) 219 robot.set_joint_effort_target(zero_joint_efforts) # Set zero torques in the initial step 220 robot.write_data_to_sim() 221 robot.reset() 222 # reset contact sensor 223 contact_forces.reset() 224 # reset target pose 225 robot.update(sim_dt) 226 _, _, _, ee_pose_b, _, _, _, _, _, _ = update_states( 227 sim, scene, robot, ee_frame_idx, arm_joint_ids, contact_forces 228 ) # at reset, the jacobians are not updated to the latest state 229 command, ee_target_pose_b, ee_target_pose_w, current_goal_idx = update_target( 230 sim, scene, osc, root_pose_w, ee_target_set, current_goal_idx 231 ) 232 # set the osc command 233 osc.reset() 234 command, task_frame_pose_b = convert_to_task_frame(osc, command=command, ee_target_pose_b=ee_target_pose_b) 235 osc.set_command(command=command, current_ee_pose_b=ee_pose_b, current_task_frame_pose_b=task_frame_pose_b) 236 else: 237 # get the updated states 238 ( 239 jacobian_b, 240 mass_matrix, 241 gravity, 242 ee_pose_b, 243 ee_vel_b, 244 root_pose_w, 245 ee_pose_w, 246 ee_force_b, 247 joint_pos, 248 joint_vel, 249 ) = update_states(sim, scene, robot, ee_frame_idx, arm_joint_ids, contact_forces) 250 # compute the joint commands 251 joint_efforts = osc.compute( 252 jacobian_b=jacobian_b, 253 current_ee_pose_b=ee_pose_b, 254 current_ee_vel_b=ee_vel_b, 255 current_ee_force_b=ee_force_b, 256 mass_matrix=mass_matrix, 257 gravity=gravity, 258 current_joint_pos=joint_pos, 259 current_joint_vel=joint_vel, 260 nullspace_joint_pos_target=joint_centers, 261 ) 262 # apply actions 263 robot.set_joint_effort_target(joint_efforts, joint_ids=arm_joint_ids) 264 robot.write_data_to_sim() 265 266 # update marker positions 267 ee_marker.visualize(ee_pose_w[:, 0:3], ee_pose_w[:, 3:7]) 268 goal_marker.visualize(ee_target_pose_w[:, 0:3], ee_target_pose_w[:, 3:7]) 269 270 # perform step 271 sim.step(render=True) 272 # update robot buffers 273 robot.update(sim_dt) 274 # update buffers 275 scene.update(sim_dt) 276 # update sim-time 277 count += 1 278 279 280# Update robot states 281def update_states( 282 sim: sim_utils.SimulationContext, 283 scene: InteractiveScene, 284 robot: Articulation, 285 ee_frame_idx: int, 286 arm_joint_ids: list[int], 287 contact_forces, 288): 289 """Update the robot states. 290 291 Args: 292 sim: (SimulationContext) Simulation context. 293 scene: (InteractiveScene) Interactive scene. 294 robot: (Articulation) Robot articulation. 295 ee_frame_idx: (int) End-effector frame index. 296 arm_joint_ids: (list[int]) Arm joint indices. 297 contact_forces: (ContactSensor) Contact sensor. 298 299 Returns: 300 jacobian_b (torch.tensor): Jacobian in the body frame. 301 mass_matrix (torch.tensor): Mass matrix. 302 gravity (torch.tensor): Gravity vector. 303 ee_pose_b (torch.tensor): End-effector pose in the body frame. 304 ee_vel_b (torch.tensor): End-effector velocity in the body frame. 305 root_pose_w (torch.tensor): Root pose in the world frame. 306 ee_pose_w (torch.tensor): End-effector pose in the world frame. 307 ee_force_b (torch.tensor): End-effector force in the body frame. 308 joint_pos (torch.tensor): The joint positions. 309 joint_vel (torch.tensor): The joint velocities. 310 311 Raises: 312 ValueError: Undefined target_type. 313 """ 314 # obtain dynamics related quantities from simulation 315 ee_jacobi_idx = ee_frame_idx - 1 316 jacobian_w = robot.root_physx_view.get_jacobians()[:, ee_jacobi_idx, :, arm_joint_ids] 317 mass_matrix = robot.root_physx_view.get_generalized_mass_matrices()[:, arm_joint_ids, :][:, :, arm_joint_ids] 318 gravity = robot.root_physx_view.get_gravity_compensation_forces()[:, arm_joint_ids] 319 # Convert the Jacobian from world to root frame 320 jacobian_b = jacobian_w.clone() 321 root_rot_matrix = matrix_from_quat(quat_inv(robot.data.root_quat_w)) 322 jacobian_b[:, :3, :] = torch.bmm(root_rot_matrix, jacobian_b[:, :3, :]) 323 jacobian_b[:, 3:, :] = torch.bmm(root_rot_matrix, jacobian_b[:, 3:, :]) 324 325 # Compute current pose of the end-effector 326 root_pos_w = robot.data.root_pos_w 327 root_quat_w = robot.data.root_quat_w 328 ee_pos_w = robot.data.body_pos_w[:, ee_frame_idx] 329 ee_quat_w = robot.data.body_quat_w[:, ee_frame_idx] 330 ee_pos_b, ee_quat_b = subtract_frame_transforms(root_pos_w, root_quat_w, ee_pos_w, ee_quat_w) 331 root_pose_w = torch.cat([root_pos_w, root_quat_w], dim=-1) 332 ee_pose_w = torch.cat([ee_pos_w, ee_quat_w], dim=-1) 333 ee_pose_b = torch.cat([ee_pos_b, ee_quat_b], dim=-1) 334 335 # Compute the current velocity of the end-effector 336 ee_vel_w = robot.data.body_vel_w[:, ee_frame_idx, :] # Extract end-effector velocity in the world frame 337 root_vel_w = robot.data.root_vel_w # Extract root velocity in the world frame 338 relative_vel_w = ee_vel_w - root_vel_w # Compute the relative velocity in the world frame 339 ee_lin_vel_b = quat_apply_inverse(robot.data.root_quat_w, relative_vel_w[:, 0:3]) # From world to root frame 340 ee_ang_vel_b = quat_apply_inverse(robot.data.root_quat_w, relative_vel_w[:, 3:6]) 341 ee_vel_b = torch.cat([ee_lin_vel_b, ee_ang_vel_b], dim=-1) 342 343 # Calculate the contact force 344 ee_force_w = torch.zeros(scene.num_envs, 3, device=sim.device) 345 sim_dt = sim.get_physics_dt() 346 contact_forces.update(sim_dt) # update contact sensor 347 # Calculate the contact force by averaging over last four time steps (i.e., to smoothen) and 348 # taking the max of three surfaces as only one should be the contact of interest 349 ee_force_w, _ = torch.max(torch.mean(contact_forces.data.net_forces_w_history, dim=1), dim=1) 350 351 # This is a simplification, only for the sake of testing. 352 ee_force_b = ee_force_w 353 354 # Get joint positions and velocities 355 joint_pos = robot.data.joint_pos[:, arm_joint_ids] 356 joint_vel = robot.data.joint_vel[:, arm_joint_ids] 357 358 return ( 359 jacobian_b, 360 mass_matrix, 361 gravity, 362 ee_pose_b, 363 ee_vel_b, 364 root_pose_w, 365 ee_pose_w, 366 ee_force_b, 367 joint_pos, 368 joint_vel, 369 ) 370 371 372# Update the target commands 373def update_target( 374 sim: sim_utils.SimulationContext, 375 scene: InteractiveScene, 376 osc: OperationalSpaceController, 377 root_pose_w: torch.tensor, 378 ee_target_set: torch.tensor, 379 current_goal_idx: int, 380): 381 """Update the targets for the operational space controller. 382 383 Args: 384 sim: (SimulationContext) Simulation context. 385 scene: (InteractiveScene) Interactive scene. 386 osc: (OperationalSpaceController) Operational space controller. 387 root_pose_w: (torch.tensor) Root pose in the world frame. 388 ee_target_set: (torch.tensor) End-effector target set. 389 current_goal_idx: (int) Current goal index. 390 391 Returns: 392 command (torch.tensor): Updated target command. 393 ee_target_pose_b (torch.tensor): Updated target pose in the body frame. 394 ee_target_pose_w (torch.tensor): Updated target pose in the world frame. 395 next_goal_idx (int): Next goal index. 396 397 Raises: 398 ValueError: Undefined target_type. 399 """ 400 401 # update the ee desired command 402 command = torch.zeros(scene.num_envs, osc.action_dim, device=sim.device) 403 command[:] = ee_target_set[current_goal_idx] 404 405 # update the ee desired pose 406 ee_target_pose_b = torch.zeros(scene.num_envs, 7, device=sim.device) 407 for target_type in osc.cfg.target_types: 408 if target_type == "pose_abs": 409 ee_target_pose_b[:] = command[:, :7] 410 elif target_type == "wrench_abs": 411 pass # ee_target_pose_b could stay at the root frame for force control, what matters is ee_target_b 412 else: 413 raise ValueError("Undefined target_type within update_target().") 414 415 # update the target desired pose in world frame (for marker) 416 ee_target_pos_w, ee_target_quat_w = combine_frame_transforms( 417 root_pose_w[:, 0:3], root_pose_w[:, 3:7], ee_target_pose_b[:, 0:3], ee_target_pose_b[:, 3:7] 418 ) 419 ee_target_pose_w = torch.cat([ee_target_pos_w, ee_target_quat_w], dim=-1) 420 421 next_goal_idx = (current_goal_idx + 1) % len(ee_target_set) 422 423 return command, ee_target_pose_b, ee_target_pose_w, next_goal_idx 424 425 426# Convert the target commands to the task frame 427def convert_to_task_frame(osc: OperationalSpaceController, command: torch.tensor, ee_target_pose_b: torch.tensor): 428 """Converts the target commands to the task frame. 429 430 Args: 431 osc: OperationalSpaceController object. 432 command: Command to be converted. 433 ee_target_pose_b: Target pose in the body frame. 434 435 Returns: 436 command (torch.tensor): Target command in the task frame. 437 task_frame_pose_b (torch.tensor): Target pose in the task frame. 438 439 Raises: 440 ValueError: Undefined target_type. 441 """ 442 command = command.clone() 443 task_frame_pose_b = ee_target_pose_b.clone() 444 445 cmd_idx = 0 446 for target_type in osc.cfg.target_types: 447 if target_type == "pose_abs": 448 command[:, :3], command[:, 3:7] = subtract_frame_transforms( 449 task_frame_pose_b[:, :3], task_frame_pose_b[:, 3:], command[:, :3], command[:, 3:7] 450 ) 451 cmd_idx += 7 452 elif target_type == "wrench_abs": 453 # These are already defined in target frame for ee_goal_wrench_set_tilted_task (since it is 454 # easier), so not transforming 455 cmd_idx += 6 456 else: 457 raise ValueError("Undefined target_type within _convert_to_task_frame().") 458 459 return command, task_frame_pose_b 460 461 462def main(): 463 """Main function.""" 464 # Load kit helper 465 sim_cfg = sim_utils.SimulationCfg(dt=0.01, device=args_cli.device) 466 sim = sim_utils.SimulationContext(sim_cfg) 467 # Set main camera 468 sim.set_camera_view([2.5, 2.5, 2.5], [0.0, 0.0, 0.0]) 469 # Design scene 470 scene_cfg = SceneCfg(num_envs=args_cli.num_envs, env_spacing=2.0) 471 scene = InteractiveScene(scene_cfg) 472 # Play the simulator 473 sim.reset() 474 # Now we are ready! 475 print("[INFO]: Setup complete...") 476 # Run the simulator 477 run_simulator(sim, scene) 478 479 480if name == "main": 481 # run the main function 482 main() 483 # close sim app 484 simulation_app.close()
Creating an Operational Space Controller#
The OperationalSpaceController class computes the joint efforts/torques for a robot to do simultaneous motion and force control in task space.
The reference frame of this task space could be an arbitrary coordinate frame in Euclidean space. By default, it is the robot’s base frame. However, in certain cases, it could be easier to define target coordinates w.r.t. a different frame. In such cases, the pose of this task reference frame, w.r.t. to the robot’s base frame, should be provided in the set_command method’s current_task_frame_pose_b argument. For example, in this tutorial, it makes sense to define the target commands w.r.t. a frame that is parallel to the wall surface, as the force control direction would be then only nonzero in the z-axis of this frame. The target pose, which is set to have the same orientation as the wall surface, is such a candidate and is used as the task frame in this tutorial. Therefore, all the arguments to the OperationalSpaceControllerCfg should be set with this task reference frame in mind.
For the motion control, the task space targets could be given as absolute (i.e., defined w.r.t. the robot base,target_types: "pose_abs") or relative the the end-effector’s current pose (i.e., target_types: "pose_rel"). For the force control, the task space targets could be given as absolute (i.e., defined w.r.t. the robot base,target_types: "force_abs"). If it is desired to apply pose and force control simultaneously, the target_typesshould be a list such as ["pose_abs", "wrench_abs"] or ["pose_rel", "wrench_abs"].
The axes that the motion and force control will be applied can be specified using the motion_control_axes_task andforce_control_axes_task arguments, respectively. These lists should consist of 0/1 for all six axes (position and rotation) and be complementary to each other (e.g., for the x-axis, if the motion_control_axes_task is 0, theforce_control_axes_task should be 1).
For the motion control axes, desired stiffness, and damping ratio values can be specified using themotion_control_stiffness and motion_damping_ratio_task arguments, which can be a scalar (same value for all axes) or a list of six scalars, one value corresponding to each axis. If desired, the stiffness and damping ratio values could be a command parameter (e.g., to learn the values using RL or change them on the go). For this,impedance_mode should be either "variable_kp" to include the stiffness values within the command or"variable" to include both the stiffness and damping ratio values. In these cases, motion_stiffness_limits_taskand motion_damping_limits_task should be set as well, which puts bounds on the stiffness and damping ratio values.
For contact force control, it is possible to apply an open-loop force control by not setting thecontact_wrench_stiffness_task, or apply a closed-loop force control (with the feed-forward term) by setting the desired stiffness values using the contact_wrench_stiffness_task argument, which can be a scalar or a list of six scalars. Please note that, currently, only the linear part of the contact wrench (hence the first three elements of the contact_wrench_stiffness_task) is considered in the closed-loop control, as the rotational part cannot be measured with the contact sensors.
For the motion control, inertial_dynamics_decoupling should be set to True to use the robot’s inertia matrix to decouple the desired accelerations in the task space. This is important for the motion control to be accurate, especially for rapid movements. This inertial decoupling accounts for the coupling between all the six motion axes. If desired, the inertial coupling between the translational and rotational axes could be ignored by setting thepartial_inertial_dynamics_decoupling to True.
If it is desired to include the gravity compensation in the operational space command, the gravity_compensationshould be set to True.
A final consideration regarding the operational space control is what to do with the null-space of redundant robots. The null-space is the subspace of the joint space that does not affect the task space coordinates. If nothing is done to control the null-space, the robot joints will float without moving the end-effector. This might be undesired (e.g., the robot joints might get close to their limits), and one might want to control the robot behaviour within its null-space. One way to do is to set nullspace_control to "position" (by default it is "none") which integrates a null-space PD controller to attract the robot joints to desired targets without affecting the task space. The behaviour of this null-space controller can be defined using the nullspace_stiffness andnullspace_damping_ratio arguments. Please note that theoretical decoupling of the null-space and task space accelerations is only possible when inertial_dynamics_decoupling is set to True andpartial_inertial_dynamics_decoupling is set to False.
The included OSC implementation performs the computation in a batched format and uses PyTorch operations.
In this tutorial, we will use "pose_abs" for controlling the motion in all axes except the z-axis and"wrench_abs" for controlling the force in the z-axis. Moreover, we will include the full inertia decoupling in the motion control and not include the gravity compensation, as the gravity is disabled from the robot configuration. We set the impedance mode to "variable_kp" to dynamically change the stiffness values (motion_damping_ratio_task is set to 1: the kd values adapt according to kp values to maintain a critically damped response). Finally, nullspace_control is set to use "position" where the joint set points are provided to be the center of the joint position limits.
# Create the OSC
osc_cfg = OperationalSpaceControllerCfg(
target_types=["pose_abs", "wrench_abs"],
impedance_mode="variable_kp",
inertial_dynamics_decoupling=True,
partial_inertial_dynamics_decoupling=False,
gravity_compensation=False,
motion_damping_ratio_task=1.0,
contact_wrench_stiffness_task=[0.0, 0.0, 0.1, 0.0, 0.0, 0.0],
motion_control_axes_task=[1, 1, 0, 1, 1, 1],
contact_wrench_control_axes_task=[0, 0, 1, 0, 0, 0],
nullspace_control="position",
)
osc = OperationalSpaceController(osc_cfg, num_envs=scene.num_envs, device=sim.device)Updating the states of the robot#
The OSC implementation is a computation-only class. Thus, it expects the user to provide the necessary information about the robot. This includes the robot’s Jacobian matrix, mass/inertia matrix, end-effector pose, velocity, contact force (all in the root frame), and finally, the joint positions and velocities. Moreover, the user should provide gravity compensation vector and null-space joint position targets if required.
Update robot states
def update_states( sim: sim_utils.SimulationContext, scene: InteractiveScene, robot: Articulation, ee_frame_idx: int, arm_joint_ids: list[int], contact_forces, ): """Update the robot states.
Args:
sim: (SimulationContext) Simulation context.
scene: (InteractiveScene) Interactive scene.
robot: (Articulation) Robot articulation.
ee_frame_idx: (int) End-effector frame index.
arm_joint_ids: (list[int]) Arm joint indices.
contact_forces: (ContactSensor) Contact sensor.
Returns:
jacobian_b (torch.tensor): Jacobian in the body frame.
mass_matrix (torch.tensor): Mass matrix.
gravity (torch.tensor): Gravity vector.
ee_pose_b (torch.tensor): End-effector pose in the body frame.
ee_vel_b (torch.tensor): End-effector velocity in the body frame.
root_pose_w (torch.tensor): Root pose in the world frame.
ee_pose_w (torch.tensor): End-effector pose in the world frame.
ee_force_b (torch.tensor): End-effector force in the body frame.
joint_pos (torch.tensor): The joint positions.
joint_vel (torch.tensor): The joint velocities.
Raises:
ValueError: Undefined target_type.
"""
# obtain dynamics related quantities from simulation
ee_jacobi_idx = ee_frame_idx - 1
jacobian_w = robot.root_physx_view.get_jacobians()[:, ee_jacobi_idx, :, arm_joint_ids]
mass_matrix = robot.root_physx_view.get_generalized_mass_matrices()[:, arm_joint_ids, :][:, :, arm_joint_ids]
gravity = robot.root_physx_view.get_gravity_compensation_forces()[:, arm_joint_ids]
# Convert the Jacobian from world to root frame
jacobian_b = jacobian_w.clone()
root_rot_matrix = matrix_from_quat(quat_inv(robot.data.root_quat_w))
jacobian_b[:, :3, :] = torch.bmm(root_rot_matrix, jacobian_b[:, :3, :])
jacobian_b[:, 3:, :] = torch.bmm(root_rot_matrix, jacobian_b[:, 3:, :])
# Compute current pose of the end-effector
root_pos_w = robot.data.root_pos_w
root_quat_w = robot.data.root_quat_w
ee_pos_w = robot.data.body_pos_w[:, ee_frame_idx]
ee_quat_w = robot.data.body_quat_w[:, ee_frame_idx]
ee_pos_b, ee_quat_b = subtract_frame_transforms(root_pos_w, root_quat_w, ee_pos_w, ee_quat_w)
root_pose_w = torch.cat([root_pos_w, root_quat_w], dim=-1)
ee_pose_w = torch.cat([ee_pos_w, ee_quat_w], dim=-1)
ee_pose_b = torch.cat([ee_pos_b, ee_quat_b], dim=-1)
# Compute the current velocity of the end-effector
ee_vel_w = robot.data.body_vel_w[:, ee_frame_idx, :] # Extract end-effector velocity in the world frame
root_vel_w = robot.data.root_vel_w # Extract root velocity in the world frame
relative_vel_w = ee_vel_w - root_vel_w # Compute the relative velocity in the world frame
ee_lin_vel_b = quat_apply_inverse(robot.data.root_quat_w, relative_vel_w[:, 0:3]) # From world to root frame
ee_ang_vel_b = quat_apply_inverse(robot.data.root_quat_w, relative_vel_w[:, 3:6])
ee_vel_b = torch.cat([ee_lin_vel_b, ee_ang_vel_b], dim=-1)
# Calculate the contact force
ee_force_w = torch.zeros(scene.num_envs, 3, device=sim.device)
sim_dt = sim.get_physics_dt()
contact_forces.update(sim_dt) # update contact sensor
# Calculate the contact force by averaging over last four time steps (i.e., to smoothen) and
# taking the max of three surfaces as only one should be the contact of interest
ee_force_w, _ = torch.max(torch.mean(contact_forces.data.net_forces_w_history, dim=1), dim=1)
# This is a simplification, only for the sake of testing.
ee_force_b = ee_force_w
# Get joint positions and velocities
joint_pos = robot.data.joint_pos[:, arm_joint_ids]
joint_vel = robot.data.joint_vel[:, arm_joint_ids]
return (
jacobian_b,
mass_matrix,
gravity,
ee_pose_b,
ee_vel_b,
root_pose_w,
ee_pose_w,
ee_force_b,
joint_pos,
joint_vel,
)Computing robot command#
The OSC separates the operation of setting the desired command and computing the desired joint positions. To set the desired command, the user should provide command vector, which includes the target commands (i.e., in the order they appear in the target_types argument of the OSC configuration), and the desired stiffness and damping ratio values if the impedance_mode is set to "variable_kp" or "variable". They should be all in the same coordinate frame as the task frame (e.g., indicated with _task subscript) and concatanated together.
In this tutorial, the desired wrench is already defined w.r.t. the task frame, and the desired pose is transformed to the task frame as the following:
Convert the target commands to the task frame
def convert_to_task_frame(osc: OperationalSpaceController, command: torch.tensor, ee_target_pose_b: torch.tensor): """Converts the target commands to the task frame.
Args:
osc: OperationalSpaceController object.
command: Command to be converted.
ee_target_pose_b: Target pose in the body frame.
Returns:
command (torch.tensor): Target command in the task frame.
task_frame_pose_b (torch.tensor): Target pose in the task frame.
Raises:
ValueError: Undefined target_type.
"""
command = command.clone()
task_frame_pose_b = ee_target_pose_b.clone()
cmd_idx = 0
for target_type in osc.cfg.target_types:
if target_type == "pose_abs":
command[:, :3], command[:, 3:7] = subtract_frame_transforms(
task_frame_pose_b[:, :3], task_frame_pose_b[:, 3:], command[:, :3], command[:, 3:7]
)
cmd_idx += 7
elif target_type == "wrench_abs":
# These are already defined in target frame for ee_goal_wrench_set_tilted_task (since it is
# easier), so not transforming
cmd_idx += 6
else:
raise ValueError("Undefined target_type within _convert_to_task_frame().")
return command, task_frame_pose_bThe OSC command is set with the command vector in the task frame, the end-effector pose in the base frame, and the task (reference) frame pose in the base frame as the following. This information is needed, as the internal computations are done in the base frame.
# set the osc command
osc.reset()
command, task_frame_pose_b = convert_to_task_frame(osc, command=command, ee_target_pose_b=ee_target_pose_b)
osc.set_command(command=command, current_ee_pose_b=ee_pose_b, current_task_frame_pose_b=task_frame_pose_b)The joint effort/torque values are computed using the provided robot states and the desired command as the following:
# compute the joint commands
joint_efforts = osc.compute(
jacobian_b=jacobian_b,
current_ee_pose_b=ee_pose_b,
current_ee_vel_b=ee_vel_b,
current_ee_force_b=ee_force_b,
mass_matrix=mass_matrix,
gravity=gravity,
current_joint_pos=joint_pos,
current_joint_vel=joint_vel,
nullspace_joint_pos_target=joint_centers,
)The computed joint effort/torque targets can then be applied on the robot.
# apply actions
robot.set_joint_effort_target(joint_efforts, joint_ids=arm_joint_ids)
robot.write_data_to_sim()The Code Execution#
You can now run the script and see the result:
./isaaclab.sh -p scripts/tutorials/05_controllers/run_osc.py --num_envs 128
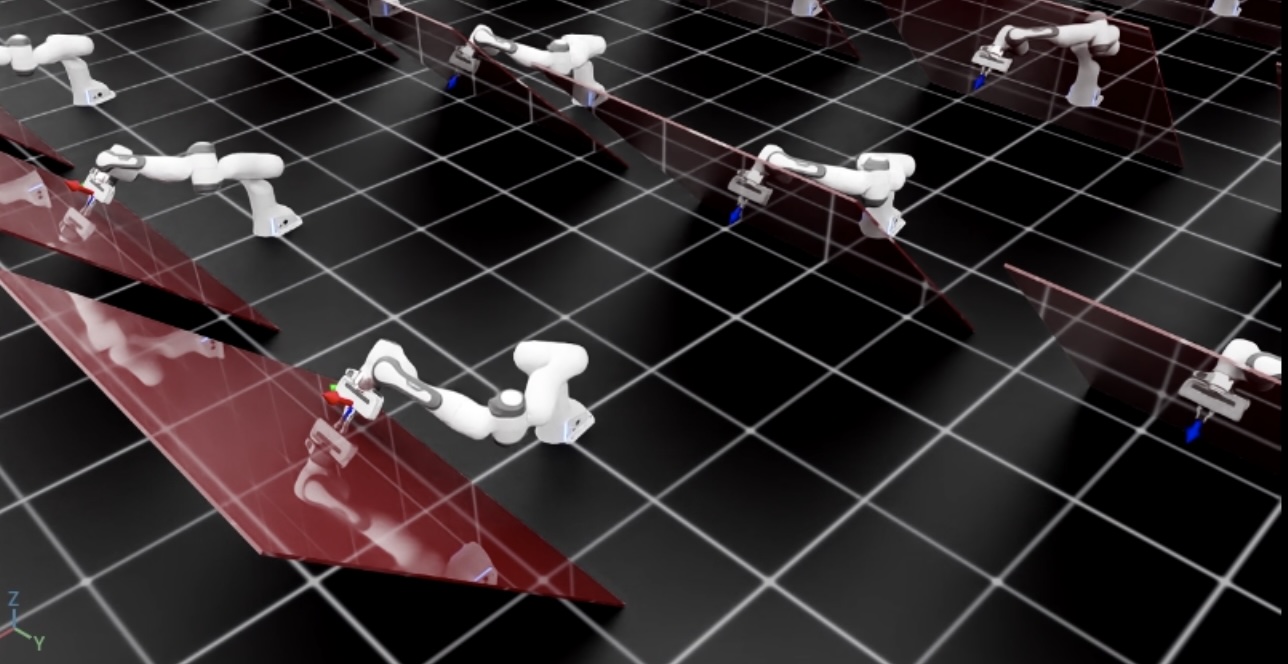
The script will start a simulation with 128 robots. The robots will be controlled using the OSC. The current and desired end-effector poses should be displayed using frame markers in addition to the red tilted wall. You should see that the robot reaches the desired pose while applying a constant force perpendicular to the wall surface.
To stop the simulation, you can either close the window or press Ctrl+C in the terminal.