Plane model segmentation — Point Cloud Library 0.0 documentation (original) (raw)
In this tutorial we will learn how to do a simple plane segmentation of a set of points, that is to find all the points within a point cloud that support a plane model. This tutorial supports the Extracting indices from a PointCloud tutorial, presented in the filtering section.
The code
First, create a file, let’s say, planar_segmentation.cpp in your favorite editor, and place the following inside it:
1#include 2#include <pcl/ModelCoefficients.h> 3#include <pcl/io/pcd_io.h> 4#include <pcl/point_types.h> 5#include <pcl/sample_consensus/method_types.h> 6#include <pcl/sample_consensus/model_types.h> 7#include <pcl/segmentation/sac_segmentation.h> 8 9int 10 main () 11{ 12 pcl::PointCloudpcl::PointXYZ::Ptr cloud(new pcl::PointCloudpcl::PointXYZ); 13 14 // Fill in the cloud data 15 cloud->width = 15; 16 cloud->height = 1; 17 cloud->points.resize (cloud->width * cloud->height); 18 19 // Generate the data 20 for (auto& point: *cloud) 21 { 22 point.x = 1024 * rand () / (RAND_MAX + 1.0f); 23 point.y = 1024 * rand () / (RAND_MAX + 1.0f); 24 point.z = 1.0; 25 } 26 27 // Set a few outliers 28 (*cloud)[0].z = 2.0; 29 (*cloud)[3].z = -2.0; 30 (*cloud)[6].z = 4.0; 31 32 std::cerr << "Point cloud data: " << cloud->size () << " points" << std::endl; 33 for (const auto& point: *cloud) 34 std::cerr << " " << point.x << " " 35 << point.y << " " 36 << point.z << std::endl; 37 38 pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients); 39 pcl::PointIndices::Ptr inliers (new pcl::PointIndices); 40 // Create the segmentation object 41 pcl::SACSegmentationpcl::PointXYZ seg; 42 // Optional 43 seg.setOptimizeCoefficients (true); 44 // Mandatory 45 seg.setModelType (pcl::SACMODEL_PLANE); 46 seg.setMethodType (pcl::SAC_RANSAC); 47 seg.setDistanceThreshold (0.01); 48 49 seg.setInputCloud (cloud); 50 seg.segment (*inliers, *coefficients); 51 52 if (inliers->indices.size () == 0) 53 { 54 PCL_ERROR ("Could not estimate a planar model for the given dataset.\n"); 55 return (-1); 56 } 57 58 std::cerr << "Model coefficients: " << coefficients->values[0] << " " 59 << coefficients->values[1] << " " 60 << coefficients->values[2] << " " 61 << coefficients->values[3] << std::endl; 62 63 std::cerr << "Model inliers: " << inliers->indices.size () << std::endl; 64 for (const auto& idx: inliers->indices) 65 std::cerr << idx << " " << cloud->points[idx].x << " " 66 << cloud->points[idx].y << " " 67 << cloud->points[idx].z << std::endl; 68 69 return (0); 70}
The explanation
Now, let’s break down the code piece by piece.
Lines:
#include <pcl/sample_consensus/method_types.h> #include <pcl/sample_consensus/model_types.h> #include <pcl/segmentation/sac_segmentation.h>
Lines:
// Fill in the cloud data cloud->width = 15; cloud->height = 1; cloud->points.resize (cloud->width * cloud->height);
// Generate the data for (auto& point: *cloud) { point.x = 1024 * rand () / (RAND_MAX + 1.0f); point.y = 1024 * rand () / (RAND_MAX + 1.0f); point.z = 1.0; }
// Set a few outliers (*cloud)[0].z = 2.0; (*cloud)[3].z = -2.0; (*cloud)[6].z = 4.0;
std::cerr << "Point cloud data: " << cloud->size () << " points" << std::endl; for (const auto& point: *cloud) std::cerr << " " << point.x << " " << point.y << " " << point.z << std::endl;
create the point cloud structure, fill in the respective values, and display the content on screen. Note that for the purpose of this tutorial, we manually added a few outliers in the data, by setting their z values different from 0.
Then, lines:
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients); pcl::PointIndices::Ptr inliers (new pcl::PointIndices); // Create the segmentation object pcl::SACSegmentationpcl::PointXYZ seg; // Optional seg.setOptimizeCoefficients (true); // Mandatory seg.setModelType (pcl::SACMODEL_PLANE); seg.setMethodType (pcl::SAC_RANSAC); seg.setDistanceThreshold (0.01);
seg.setInputCloud (cloud); seg.segment (*inliers, *coefficients);
create the SACSegmentation object and set the model and method type. This is also where we specify the “distance threshold”, which determines how close a point must be to the model in order to be considered an inlier. In this tutorial, we will use the RANSAC method (pcl::SAC_RANSAC) as the robust estimator of choice. Our decision is motivated by RANSAC’s simplicity (other robust estimators use it as a base and add additional, more complicated concepts). For more information about RANSAC, check its Wikipedia page.
Finally:
std::cerr << "Model coefficients: " << coefficients->values[0] << " " << coefficients->values[1] << " " << coefficients->values[2] << " " << coefficients->values[3] << std::endl;
are used to show the contents of the inlier set, together with the estimated plane parameters (in  form).
form).
Compiling and running the program
Add the following lines to your CMakeLists.txt file:
1cmake_minimum_required(VERSION 3.5 FATAL_ERROR) 2 3project(planar_segmentation) 4 5find_package(PCL 1.2 REQUIRED) 6 7add_executable (planar_segmentation planar_segmentation.cpp) 8target_link_libraries (planar_segmentation ${PCL_LIBRARIES})
After you have made the executable, you can run it. Simply do:
You will see something similar to:
Point cloud data: 15 points 0.352222 -0.151883 2 -0.106395 -0.397406 1 -0.473106 0.292602 1 -0.731898 0.667105 -2 0.441304 -0.734766 1 0.854581 -0.0361733 1 -0.4607 -0.277468 4 -0.916762 0.183749 1 0.968809 0.512055 1 -0.998983 -0.463871 1 0.691785 0.716053 1 0.525135 -0.523004 1 0.439387 0.56706 1 0.905417 -0.579787 1 0.898706 -0.504929 1 [pcl::SACSegmentation::initSAC] Setting the maximum number of iterations to 50 Model coefficients: 0 0 1 -1 Model inliers: 12 1 -0.106395 -0.397406 1 2 -0.473106 0.292602 1 4 0.441304 -0.734766 1 5 0.854581 -0.0361733 1 7 -0.916762 0.183749 1 8 0.968809 0.512055 1 9 -0.998983 -0.463871 1 10 0.691785 0.716053 1 11 0.525135 -0.523004 1 12 0.439387 0.56706 1 13 0.905417 -0.579787 1 14 0.898706 -0.504929 1
A graphical display of the segmentation process is shown below.
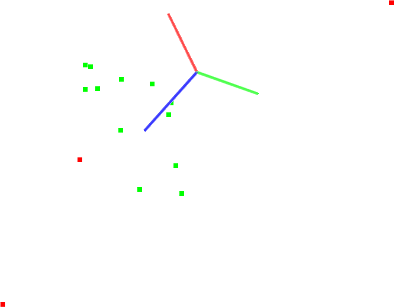
Note that the coordinate axes are represented as red (x), green (y), and blue (z). The points are represented with red as the outliers, and green as the inliers of the plane model found.