Reinforcement Learning - MATLAB & Simulink (original) (raw)
Train deep neural network agents by interacting with an unknown dynamic environment
Reinforcement learning is a goal-directed computational approach where an agent learns to perform a task by interacting with an unknown dynamic environment. During training, the learning algorithm updates the agent policy parameters. The goal of the learning algorithm is to find an optimal policy that maximizes the long-term reward received during the task.
Depending on the type of agent, the policy is represented by one or more policy and value function representations. You can implement these representations using deep neural networks. You can then train these networks using Reinforcement Learning Toolbox™ software.
For more information, see Reinforcement Learning Using Deep Neural Networks.
Topics
- Reinforcement Learning Using Deep Neural Networks
Reinforcement learning is a goal-directed computational approach where a computer learns to perform a task by interacting with an unknown dynamic environment. - Control Water Level in a Tank Using a DDPG Agent
Train a controller using reinforcement learning with a plant modeled in Simulink® as the training environment. - Create DQN Agent Using Deep Network Designer and Train Using Image Observations
Create a reinforcement learning agent using the Deep Network Designer app from the Deep Learning Toolbox™. - Train DDPG Agent to Swing Up and Balance Pendulum with Image Observation
Train a reinforcement learning agent using an image-based observation signal. - Train DQN Agent for Lane Keeping Assist Using Parallel Computing
Train a reinforcement learning agent for a lane keeping assist application. - Imitate MPC Controller for Lane Keeping Assist
Train a deep neural network to imitate the behavior of a model predictive controller.
Featured Examples
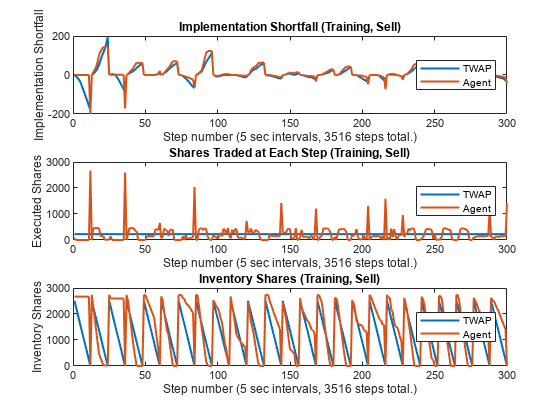
Deep Reinforcement Learning for Optimal Trade Execution
Use the Reinforcement Learning Toolbox™ and Deep Learning Toolbox™ to design agents for optimal trade execution.

Train DDPG Agent to Control Sliding Robot
Train a reinforcement learning agent to control a flying robot model.
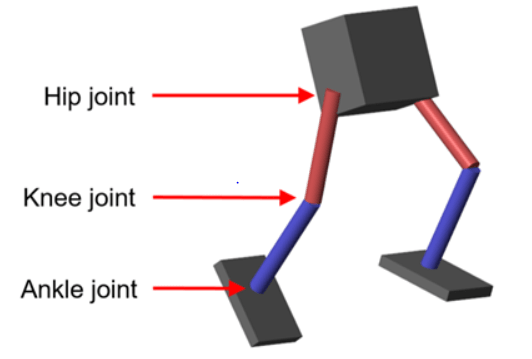
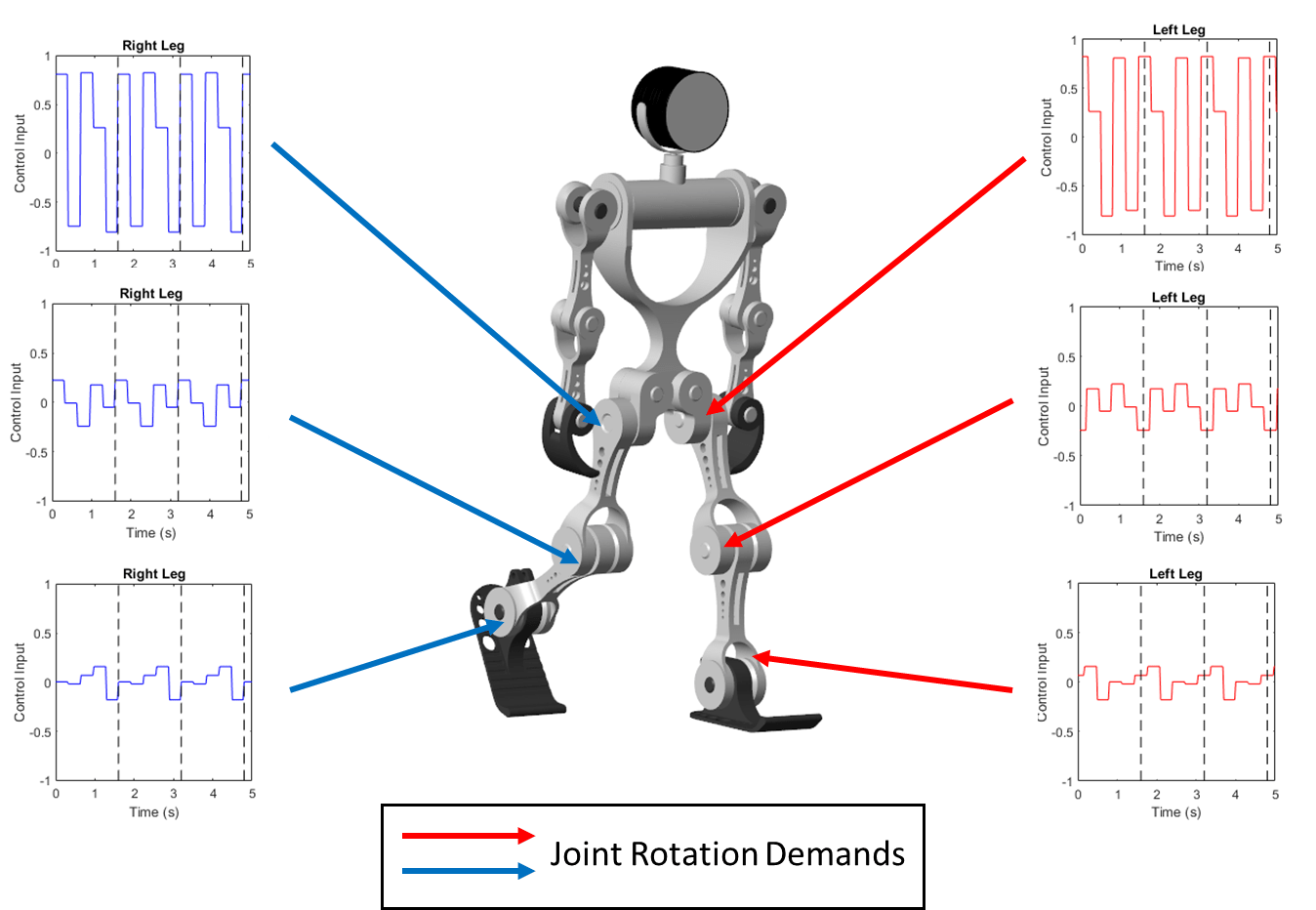
Train Biped Robot to Walk Using Reinforcement Learning Agents
Train a reinforcement learning agent to control a biped walking robot modeled in Simscape™ Multibody™.

Train DDPG Agent for Adaptive Cruise Control
Train a reinforcement learning agent for an adaptive cruise control application.

Train DDPG Agent for Path-Following Control
Train a reinforcement learning agent for a lane following application.
Train Humanoid Walker
Train a humanoid robot to walk using either a genetic algorithm or reinforcement learning.

Train PPO Agent for Automatic Parking Valet
Train a reinforcement learning agent to park a car in an open parking space.