Create Custom YOLO v2 Object Detection Network - MATLAB & Simulink (original) (raw)
This example shows how to create a custom YOLO v2 object detection network by modifying a pretrained MobileNet v2 network.
The procedure to convert a pretrained network into a YOLO v2 network is similar to the transfer learning procedure for image classification:
- Load the pretrained network.
- Select a layer from the pretrained network to use for feature extraction.
- Remove all layers after the feature extraction layer.
- Add new layers to support the object detection task.
Load Pretrained Network
Load a pretrained MobileNet v2 network using the imagePretrainedNetwork function. This network requires the Deep Learning Toolbox Model for MobileNet v2 Network_™_ support package. If this support package is not installed, then the function provides a download link.
net = imagePretrainedNetwork("mobilenetv2")
net = dlnetwork with properties:
Layers: [153×1 nnet.cnn.layer.Layer]
Connections: [162×2 table]
Learnables: [210×3 table]
State: [104×3 table]
InputNames: {'input_1'}
OutputNames: {'Logits_softmax'}
Initialized: 1View summary with summary.
Update Network Input Size
Update the network input size to meet the training data requirements. For example, assume the training data are 300-by-300 RGB images. Set the input size.
imageInputSize = [300 300 3];
Next, create a new image input layer with the same name as the original layer.
imgLayer = imageInputLayer(imageInputSize,Name="input_1")
imgLayer = ImageInputLayer with properties:
Name: 'input_1'
InputSize: [300 300 3]
SplitComplexInputs: 0Hyperparameters DataAugmentation: 'none' Normalization: 'zerocenter' NormalizationDimension: 'auto' Mean: []
Replace the old image input layer with the new image input layer.
net = replaceLayer(net,"input_1",imgLayer);
Display and inspect the layers in the network by using the analyzeNetwork function.
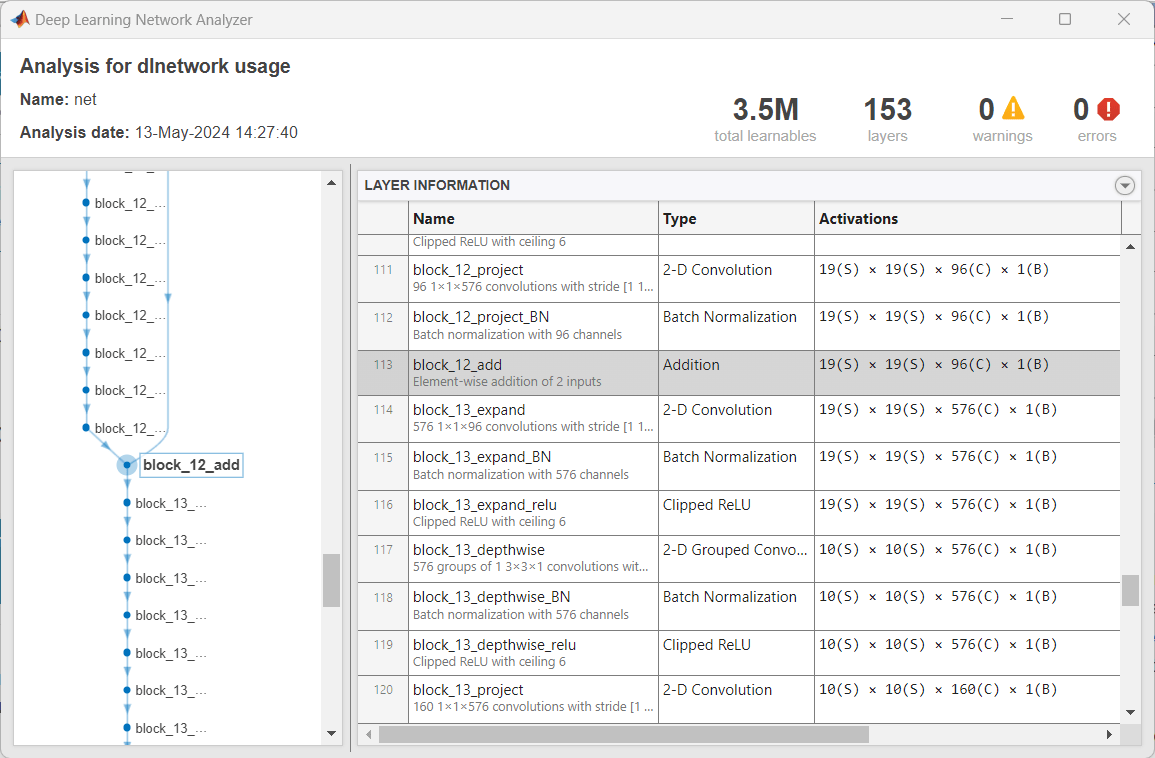
Select Feature Extraction Layer
A YOLO v2 feature extraction layer is most effective when the output feature width and height are between 8 and 16 times smaller than the input image. This amount of downsampling is a tradeoff between spatial resolution and output-feature quality. You can use the analyzeNetwork function or the Deep Network Designer app to determine the output sizes of layers within a network. Note that selecting an optimal feature extraction layer requires empirical evaluation.
Set the feature extraction layer to "block_12_add". The output size of this layer is about 16 times smaller than the input image size of 300-by-300.
featureExtractionLayer = "block_12_add";
Remove Layers After Feature Extraction Layer
Remove all of the layers after the feature extraction layer by using the removeLayers function.
index = find(strcmp({net.Layers(1:end).Name},featureExtractionLayer)); net = removeLayers(net,{net.Layers(index+1:end).Name});
Create YOLO v2 Detection Sub-Network
The detection subnetwork consists of groups of serially connected convolution, ReLU, and batch normalization layers. These layers are followed by a yolov2TransformLayer.
First, create two groups of serially connected convolution, ReLU, and batch normalization layers. Set the convolution layer filter size to 3-by-3 and the number of filters to match the number of channels in the feature extraction layer output. Specify "same" padding in the convolution layer to preserve the input size.
filterSize = [3 3]; numFilters = 96;
detectionLayers = [ convolution2dLayer(filterSize,numFilters,Name="yolov2Conv1", ... Padding="same",WeightsInitializer=@(sz)randn(sz)*0.01) batchNormalizationLayer(Name="yolov2Batch1") reluLayer(Name="yolov2Relu1") convolution2dLayer(filterSize,numFilters,Name="yolov2Conv2", ... Padding="same",WeightsInitializer=@(sz)randn(sz)*0.01) batchNormalizationLayer(Name="yolov2Batch2") reluLayer(Name="yolov2Relu2") ]
detectionLayers = 6×1 Layer array with layers:
1 'yolov2Conv1' 2-D Convolution 96 3×3 convolutions with stride [1 1] and padding 'same'
2 'yolov2Batch1' Batch Normalization Batch normalization
3 'yolov2Relu1' ReLU ReLU
4 'yolov2Conv2' 2-D Convolution 96 3×3 convolutions with stride [1 1] and padding 'same'
5 'yolov2Batch2' Batch Normalization Batch normalization
6 'yolov2Relu2' ReLU ReLUNext, create the final portion of the detection subnetwork, which has a convolution layer followed by a yolov2TransformLayer. The output of the convolution layer predicts the following for each anchor box:
- The object class probabilities.
- The x and y location offset.
- The width and height offset.
Specify the anchor boxes and number of classes and compute the number of filters for the convolution layer.
numClasses = 5;
anchorBoxes = [16 16; 32 16];
numAnchors = size(anchorBoxes,1); numPredictionsPerAnchor = 5; numFiltersInLastConvLayer = numAnchors*(numClasses+numPredictionsPerAnchor);
Add the convolution2dLayer and yolov2TransformLayer to the detection subnetwork.
detectionLayers = [ detectionLayers convolution2dLayer(1,numFiltersInLastConvLayer, ... Name="yolov2ClassConv",WeightsInitializer=@(sz)randn(sz)*0.01) yolov2TransformLayer(numAnchors,Name="yolov2Transform") ]
detectionLayers = 8×1 Layer array with layers:
1 'yolov2Conv1' 2-D Convolution 96 3×3 convolutions with stride [1 1] and padding 'same'
2 'yolov2Batch1' Batch Normalization Batch normalization
3 'yolov2Relu1' ReLU ReLU
4 'yolov2Conv2' 2-D Convolution 96 3×3 convolutions with stride [1 1] and padding 'same'
5 'yolov2Batch2' Batch Normalization Batch normalization
6 'yolov2Relu2' ReLU ReLU
7 'yolov2ClassConv' 2-D Convolution 20 1×1 convolutions with stride [1 1] and padding [0 0 0 0]
8 'yolov2Transform' YOLO v2 Transform Layer YOLO v2 Transform Layer with 2 anchorsComplete YOLO v2 Detection Network
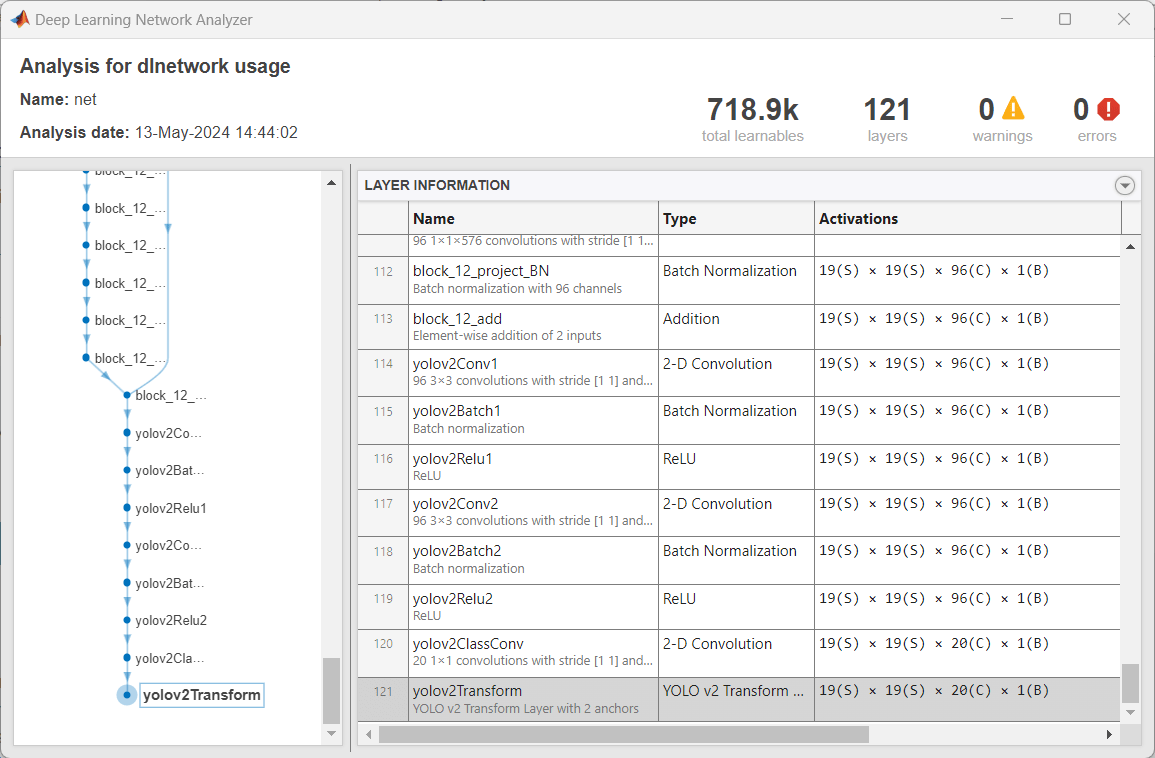
Attach the detection subnetwork to the feature extraction network.
net = addLayers(net,detectionLayers); net = connectLayers(net,featureExtractionLayer,"yolov2Conv1");
Use analyzeNetwork function to check the network.
Create a yolov2ObjectDetector object from the network. You can then train the network by using the trainYOLOv2ObjectDetector function.
classNames = ["person" "bicycle" "car" "bus" "truck"]; detector = yolov2ObjectDetector(net,classNames,anchorBoxes)
detector = yolov2ObjectDetector with properties:
Network: [1×1 dlnetwork]
InputSize: [300 300 3]
TrainingImageSize: [300 300]
AnchorBoxes: [2×2 double]
ClassNames: [5×1 categorical]
ReorganizeLayerSource: ''
LossFactors: [5 1 1 1]
ModelName: ''See Also
yolov2ObjectDetector | trainYOLOv2ObjectDetector