Expectimax Algorithm in Game Theory (original) (raw)
Last Updated : 12 Jul, 2025
The Expectimax search algorithm is a game theory algorithm used to maximize the expected utility. It is a variation of the Minimax algorithm. While Minimax assumes that the adversary(the minimizer) plays optimally, the Expectimax doesn't. This is useful for modelling environments where adversary agents are not optimal, or their actions are based on chance.
Expectimax vs Minimax
Consider the below Minimax tree:
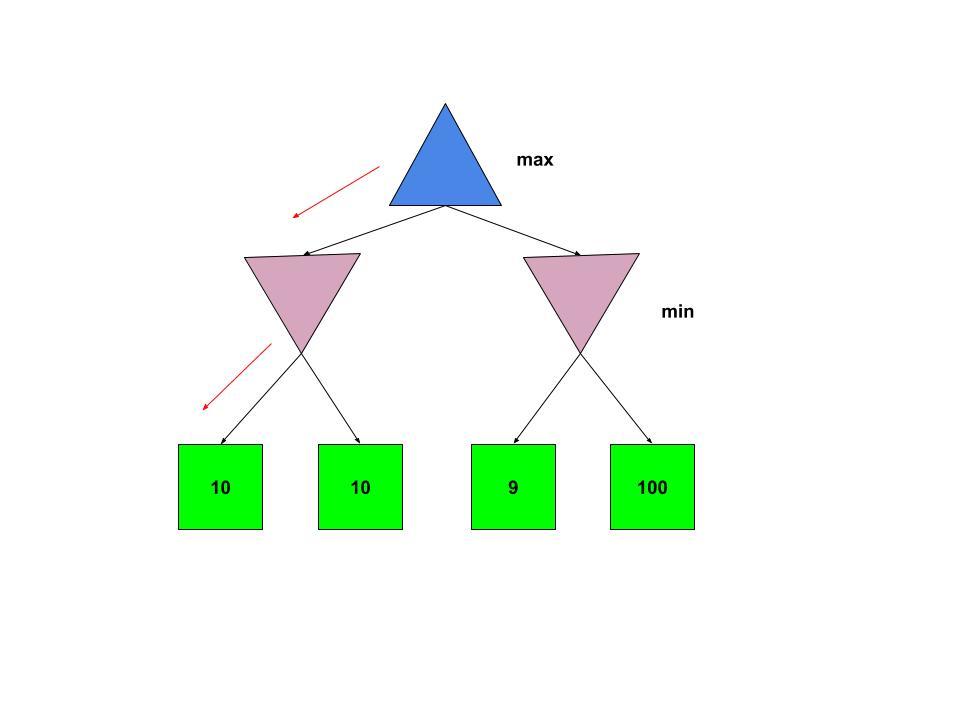
As we know that the adversary agent(minimizer) plays optimally, it makes sense to go to the left. But what if there is a possibility of the minimizer making a mistake(or not playing optimally). Therefore going right might sound more appealing or may result in a better solution.
In the below Expectimax tree, we have replaced minimizer nodes by chance nodes.
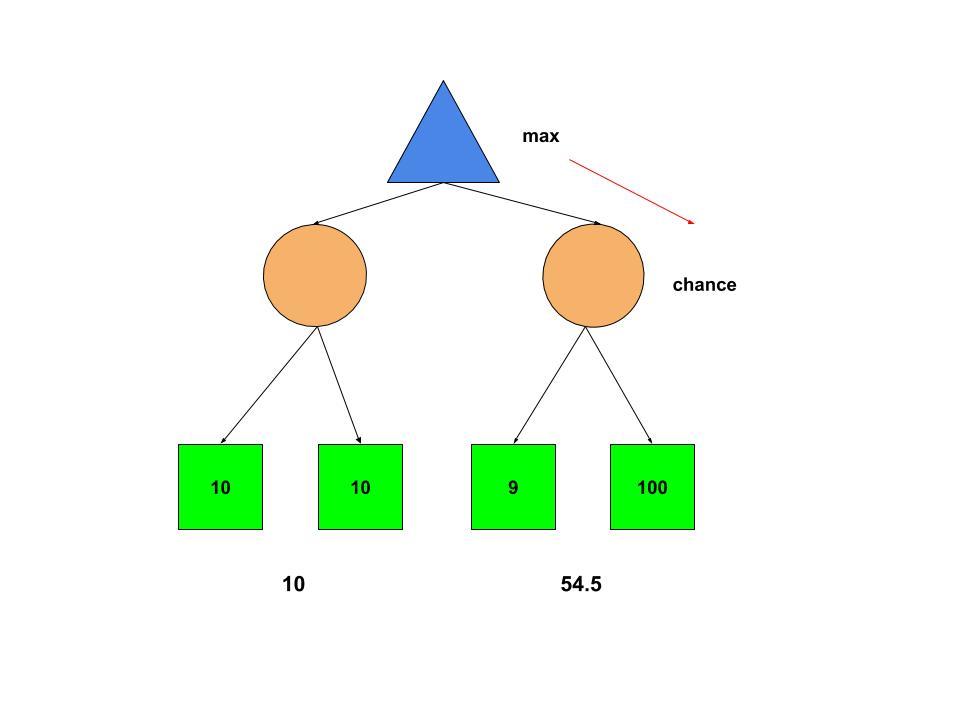
The Chance nodes take the average of all available utilities giving us the 'expected utility'. Thus the expected utilities for left and right sub-trees are (10+10)/2=10 and (100+9)/2=54.5. The maximizer node chooses the right sub-tree to maximize the expected utilities.
Advantages of Expectimax over Minimax:
- Expectimax algorithm helps take advantage of non-optimal opponents.
- Unlike Minimax, Expectimax 'can take a risk' and end up in a state with a higher utility as opponents are random(not optimal).
Disadvantages:
- Expectimax is not optimal. It may lead to the agent losing(ending up in a state with lesser utility)
- Expectimax requires the full search tree to be explored. There is no type of pruning that can be done, as the value of a single unexplored utility can change the expectimax value drastically. Therefore it can be slow.
- It is sensitive to monotonic transformations in utility values.
For minimax, if we have two states S1 and S2, if S1 is better than S2, the magnitudes of the evaluation function values f(S1) and f(S2) don't matter as along as f(S1)>f(S2).
For expectimax, magnitudes of the evaluation function values matter.
Algorithm: Expectimax can be implemented using recursive algorithm as follows,
- If the current call is a maximizer node, return the maximum of the state values of the nodes successors.
- If the current call is a chance node, then return the average of the state values of the nodes successors(assuming all nodes have equal probability). If different nodes have different probabilities the expected utility from there is given by ∑ixipi
- We call the function recursively until we reach a terminal node(the state with no successors). Then return the utility for that state.
Implementation:
C++ `
// C++ program to illustrate // Expectimax Algorithm
#include using namespace std;
// Structure to declare // left and right nodes struct Node { int value; struct Node *left, *right; };
// Initializing Nodes to NULL Node* newNode(int v) { Node* temp = new Node; temp->value = v; temp->left = NULL; temp->right = NULL; return temp; }
// Getting expectimax float expectimax(Node* node, bool is_max) { // Condition for Terminal node if (node->left == NULL && node->right == NULL) { return node->value; }
// Maximizer node. Chooses the max from the
// left and right sub-trees
if (is_max) {
return max(
expectimax(
node->left, false),
expectimax(node->right, false));
}
// Chance node. Returns the average of
// the left and right sub-trees
else {
return (
expectimax(node->left, true)
+ expectimax(node->right, true))
/ 2.0;
}}
// Driver code int main() { // Non leaf nodes. // If search is limited // to a given depth, // their values are // taken as heuristic value. // But because the entire tree // is searched their // values don't matter Node* root = newNode(0); root->left = newNode(0); root->right = newNode(0);
// Assigning values to Leaf nodes
root->left->left = newNode(10);
root->left->right = newNode(10);
root->right->left = newNode(9);
root->right->right = newNode(100);
float res = expectimax(root, true);
cout << "Expectimax value is " << res << endl; return 0; }
Java
// Java program to illustrate // Expectimax Algorithm class GFG{
// Structure to declare // left and right nodes static class Node { int value; Node left, right; };
// Initializing Nodes to null static Node newNode(int v) { Node temp = new Node(); temp.value = v; temp.left = null; temp.right = null; return temp; }
// Getting expectimax static float expectimax(Node node, boolean is_max) { // Condition for Terminal node if (node.left == null && node.right == null) { return node.value; }
// Maximizer node. Chooses the max from the
// left and right sub-trees
if (is_max) {
return Math.max(
expectimax(
node.left, false),
expectimax(node.right, false));
}
// Chance node. Returns the average of
// the left and right sub-trees
else {
return (float) ((
expectimax(node.left, true)
+ expectimax(node.right, true))
/ 2.0);
}}
// Driver code public static void main(String[] args) { // Non leaf nodes. // If search is limited // to a given depth, // their values are // taken as heuristic value. // But because the entire tree // is searched their // values don't matter Node root = newNode(0); root.left = newNode(0); root.right = newNode(0);
// Assigning values to Leaf nodes
root.left.left = newNode(10);
root.left.right = newNode(10);
root.right.left = newNode(9);
root.right.right = newNode(100);
float res = expectimax(root, true);
System.out.print("Expectimax value is "- res +"\n"); } }
// This code is contributed by PrinciRaj1992
Python3
Python3 program to illustrate
Expectimax Algorithm
Structure to declare
left and right nodes
class Node:
def __init__(self, value):
self.value = value
self.left = None
self.right = NoneInitializing Nodes to None
def newNode(v):
temp = Node(v);
return temp;Getting expectimax
def expectimax(node, is_max):
# Condition for Terminal node
if (node.left == None and node.right == None):
return node.value;
# Maximizer node. Chooses the max from the
# left and right sub-trees
if (is_max):
return max(expectimax(node.left, False), expectimax(node.right, False))
# Chance node. Returns the average of
# the left and right sub-trees
else:
return (expectimax(node.left, True)+ expectimax(node.right, True))/2;Driver code
if name=='main':
# Non leaf nodes.
# If search is limited
# to a given depth,
# their values are
# taken as heuristic value.
# But because the entire tree
# is searched their
# values don't matter
root = newNode(0);
root.left = newNode(0);
root.right = newNode(0);
# Assigning values to Leaf nodes
root.left.left = newNode(10);
root.left.right = newNode(10);
root.right.left = newNode(9);
root.right.right = newNode(100);
res = expectimax(root, True)
print("Expectimax value is "+str(res))This code is contributed by rutvik_56
C#
// C# program to illustrate // Expectimax Algorithm using System;
class GFG{
// Structure to declare // left and right nodes class Node { public int value; public Node left, right; };
// Initializing Nodes to null static Node newNode(int v) { Node temp = new Node(); temp.value = v; temp.left = null; temp.right = null; return temp; }
// Getting expectimax static float expectimax(Node node, bool is_max) { // Condition for Terminal node if (node.left == null && node.right == null) { return node.value; }
// Maximizer node. Chooses the max from the
// left and right sub-trees
if (is_max) {
return Math.Max(
expectimax(
node.left, false),
expectimax(node.right, false));
}
// Chance node. Returns the average of
// the left and right sub-trees
else {
return (float) ((
expectimax(node.left, true)
+ expectimax(node.right, true))
/ 2.0);
}}
// Driver code public static void Main(String[] args) { // Non leaf nodes. // If search is limited // to a given depth, // their values are // taken as heuristic value. // But because the entire tree // is searched their // values don't matter Node root = newNode(0); root.left = newNode(0); root.right = newNode(0);
// Assigning values to Leaf nodes
root.left.left = newNode(10);
root.left.right = newNode(10);
root.right.left = newNode(9);
root.right.right = newNode(100);
float res = expectimax(root, true);
Console.Write("Expectimax value is "- res +"\n"); } }
// This code is contributed by sapnasingh4991
JavaScript
`
Output:
Expectimax value is 54.5
Time complexity: O(bm)
Space complexity: O(b*m), where b is branching factor and m is the maximum depth of the tree.
Applications: Expectimax can be used in environments where the actions of one of the agents are random. Following are a few examples,
- In Pacman, if we have random ghosts, we can model Pacman as the maximizer and ghosts as chance nodes. The utility values will be the values of the terminal states(win, lose or draw) or the evaluation function value for the set of possible states at a given depth.
- We can create a minesweeper AI by modelling the player agent as the maximizer and the mines as chance nodes.