Yuxuan Kuang (original) (raw)
Yuxuan Kuang  I am a Ph.D. student in the CMU Robotics Institute, working with Prof. Shubham Tulsiani and Prof. Katerina Fragkiadaki. Previously, I received my Bachelor's degree in Computer Science from Peking University. During my undergrad years, I have been fortunate to work with Prof. Yue Wang, Prof. Marco Pavone, Prof. Meng Jiang, and Prof. He Wang. My research interest spans Robotics, 3D/4D Vision, and Machine Learning. My research objective is to endow Embodied AI Agents working in complex real-world scenes with generalizable sensorimotor capabilities. How to pronounce my first name? To approximate: replace the letter "x" with "sh". I also go by Gavin.Here is a standard Chinese pronunciation of my first name if you wonder: Email / GitHub / Google Scholar / Twitter I am a Ph.D. student in the CMU Robotics Institute, working with Prof. Shubham Tulsiani and Prof. Katerina Fragkiadaki. Previously, I received my Bachelor's degree in Computer Science from Peking University. During my undergrad years, I have been fortunate to work with Prof. Yue Wang, Prof. Marco Pavone, Prof. Meng Jiang, and Prof. He Wang. My research interest spans Robotics, 3D/4D Vision, and Machine Learning. My research objective is to endow Embodied AI Agents working in complex real-world scenes with generalizable sensorimotor capabilities. How to pronounce my first name? To approximate: replace the letter "x" with "sh". I also go by Gavin.Here is a standard Chinese pronunciation of my first name if you wonder: Email / GitHub / Google Scholar / Twitter |
 Click for domain randomization Click for domain randomization |
|---|
Research
*: Equal Contributions; †: Equal Advising
 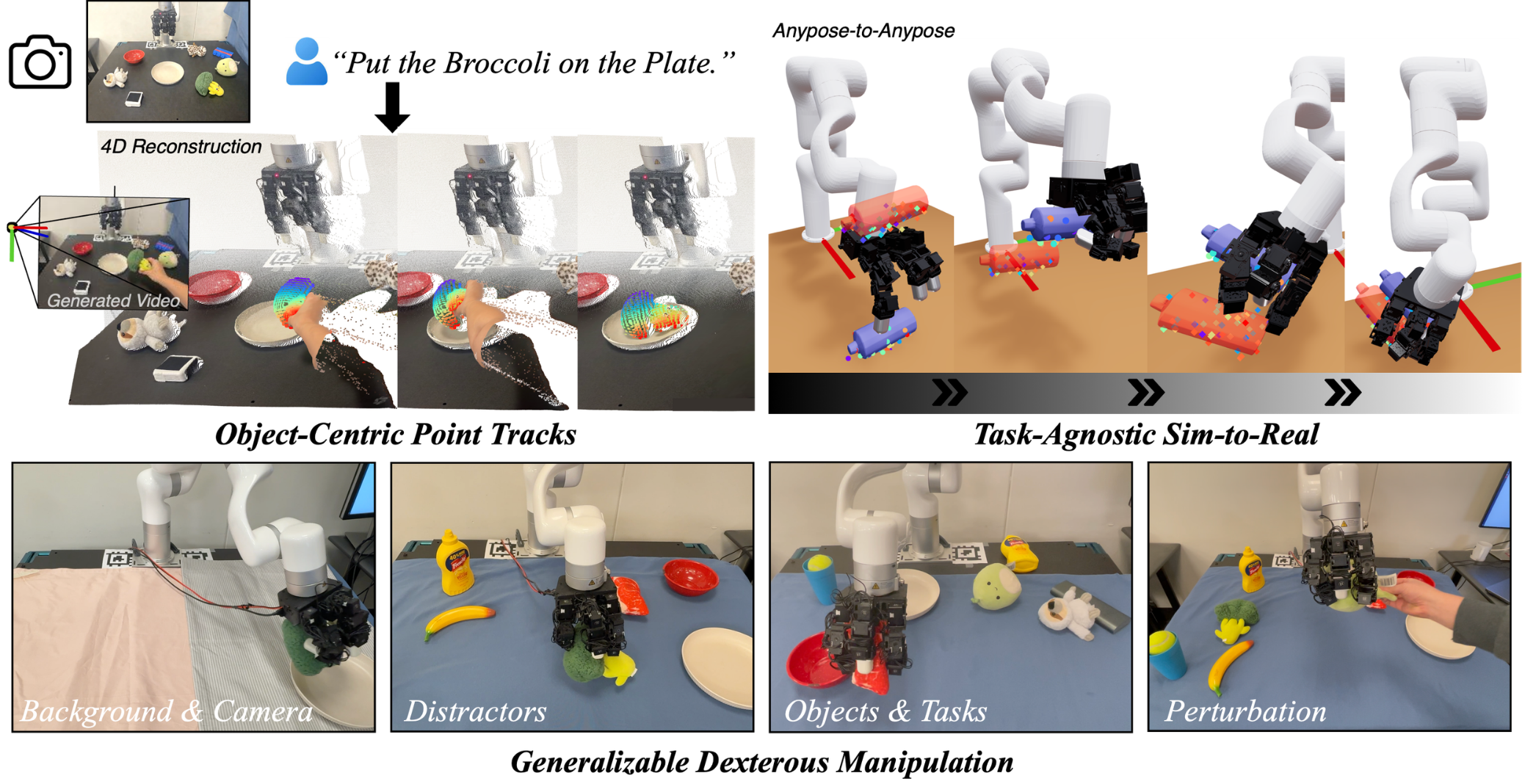 |
Dex4D: Task-Agnostic Point Track Policy for Sim-to-Real Dexterous Manipulation Yuxuan Kuang, Sungjae Park, Katerina Fragkiadaki†, Shubham Tulsiani† Paper /Project / Code arXiv preprint, 2026. |
|---|---|
 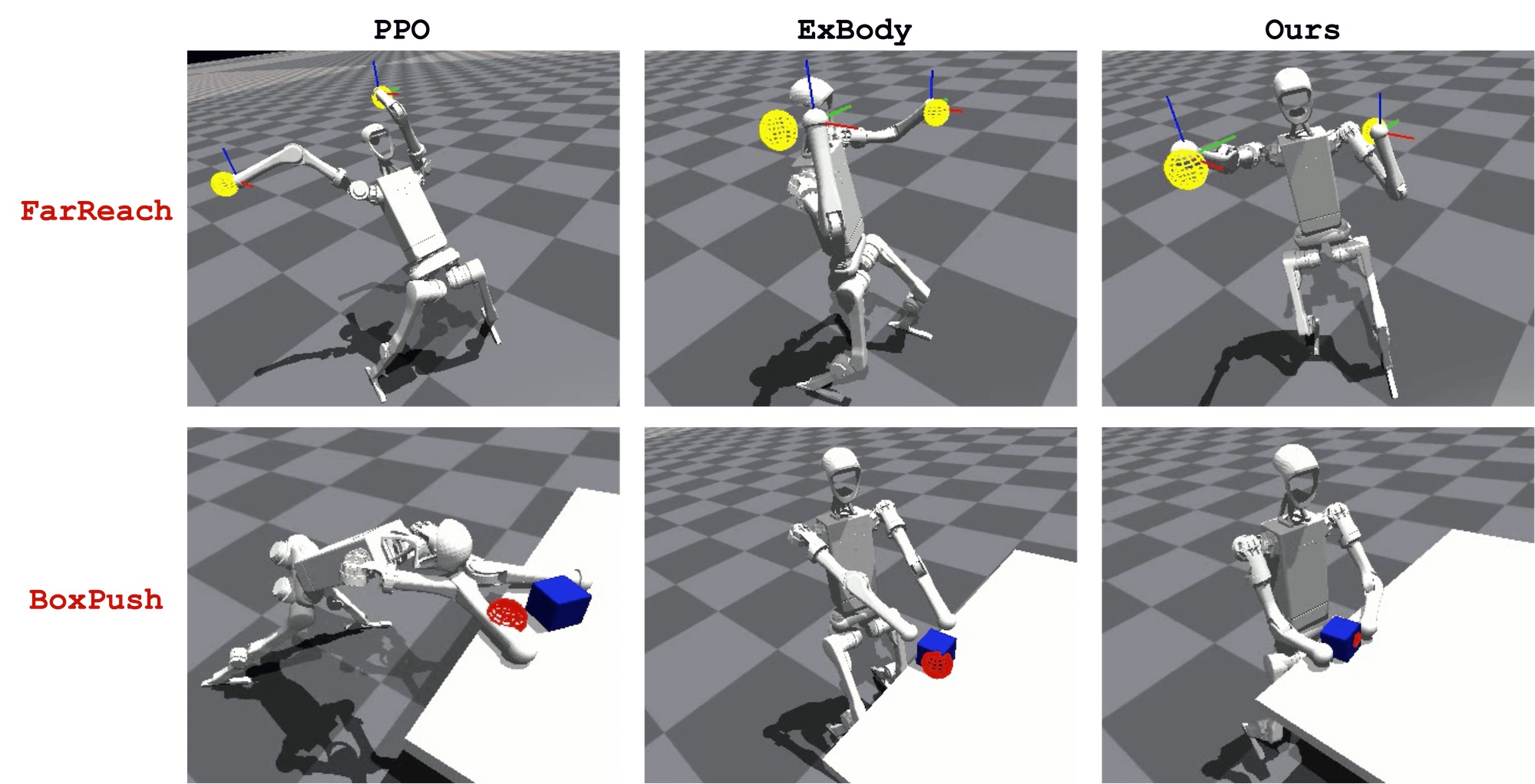 |
SkillBlender: Towards Versatile Humanoid Whole-Body Loco-Manipulation via Skill Blending Yuxuan Kuang*, Haoran Geng*, Amine Elhafsi, Tan-Dzung Do, Pieter Abbeel, Jitendra Malik, Marco Pavone, Yue Wang Paper /Project / Code arXiv preprint, 2025. |
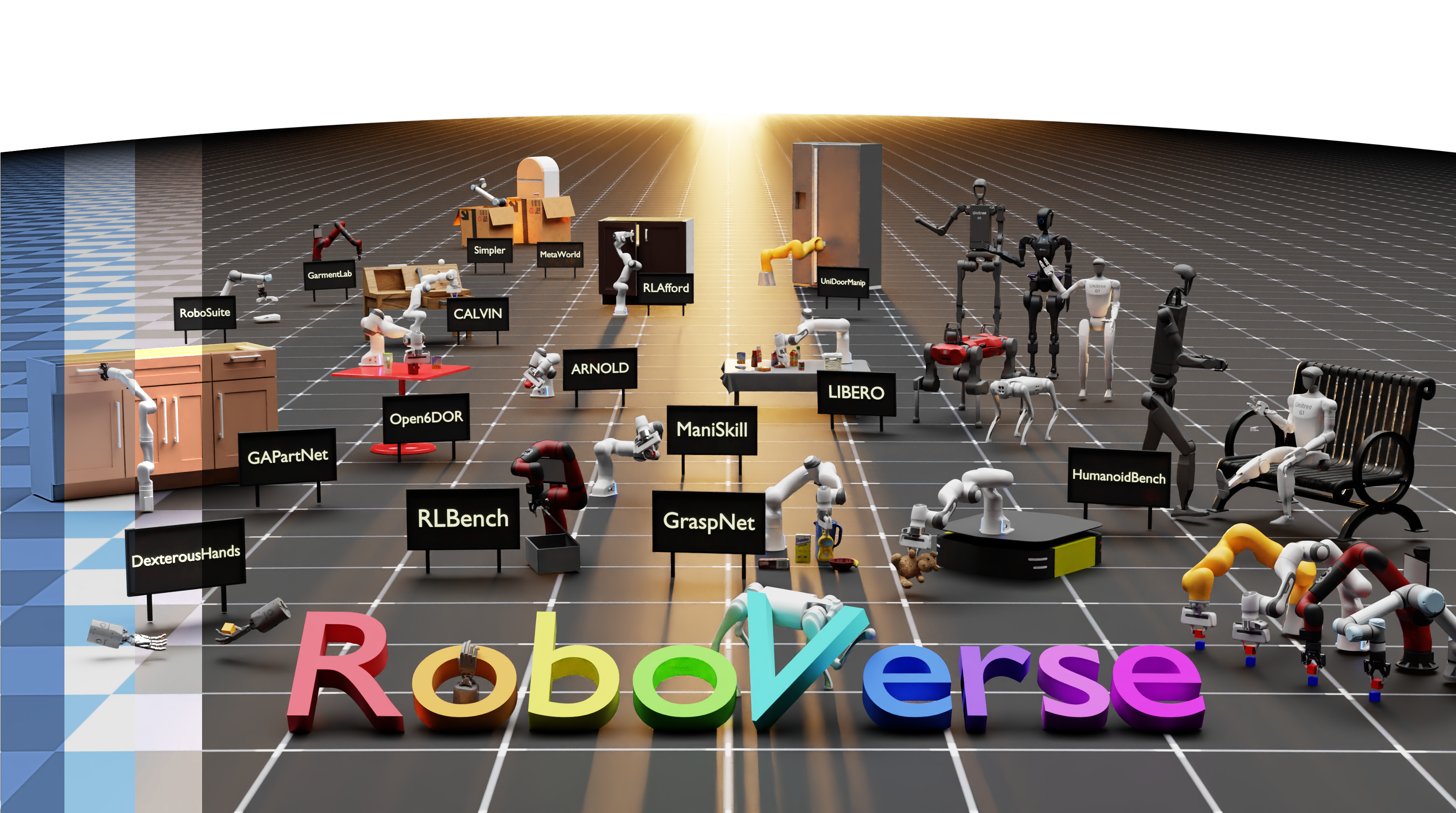 |
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning RoboVerse Team Paper /Project / Code Robotics: Science and Systems (RSS), 2025. (Oral Presentation) |
 |
FetchBot: Learning Generalizable Object Fetching in Cluttered Scenes via Zero-Shot Sim2Real Weiheng Liu*, Yuxuan Wan*, Jilong Wang, Yuxuan Kuang, Wenbo Cui, Xuesong Shi, Haoran Li, Dongbin Zhao, Zhizheng Zhang†, He Wang† Paper /Project / Code Conference on Robot Learning (CoRL), 2025. (Oral Presentation) |
 |
A0: An Affordance-Aware Hierarchical Model for General Robotic Manipulation Rongtao Xu*, Jian Zhang*, Minghao Guo*, Youpeng Wen*, Haoting Yang, Min Lin, Jianzheng Huang, Zhe Li, Kaidong Zhang, Liqiong Wang, Yuxuan Kuang, Meng Cao, Feng Zheng†, Xiaodan Liang† Paper /Project / Code International Conference on Computer Vision (ICCV), 2025. |
 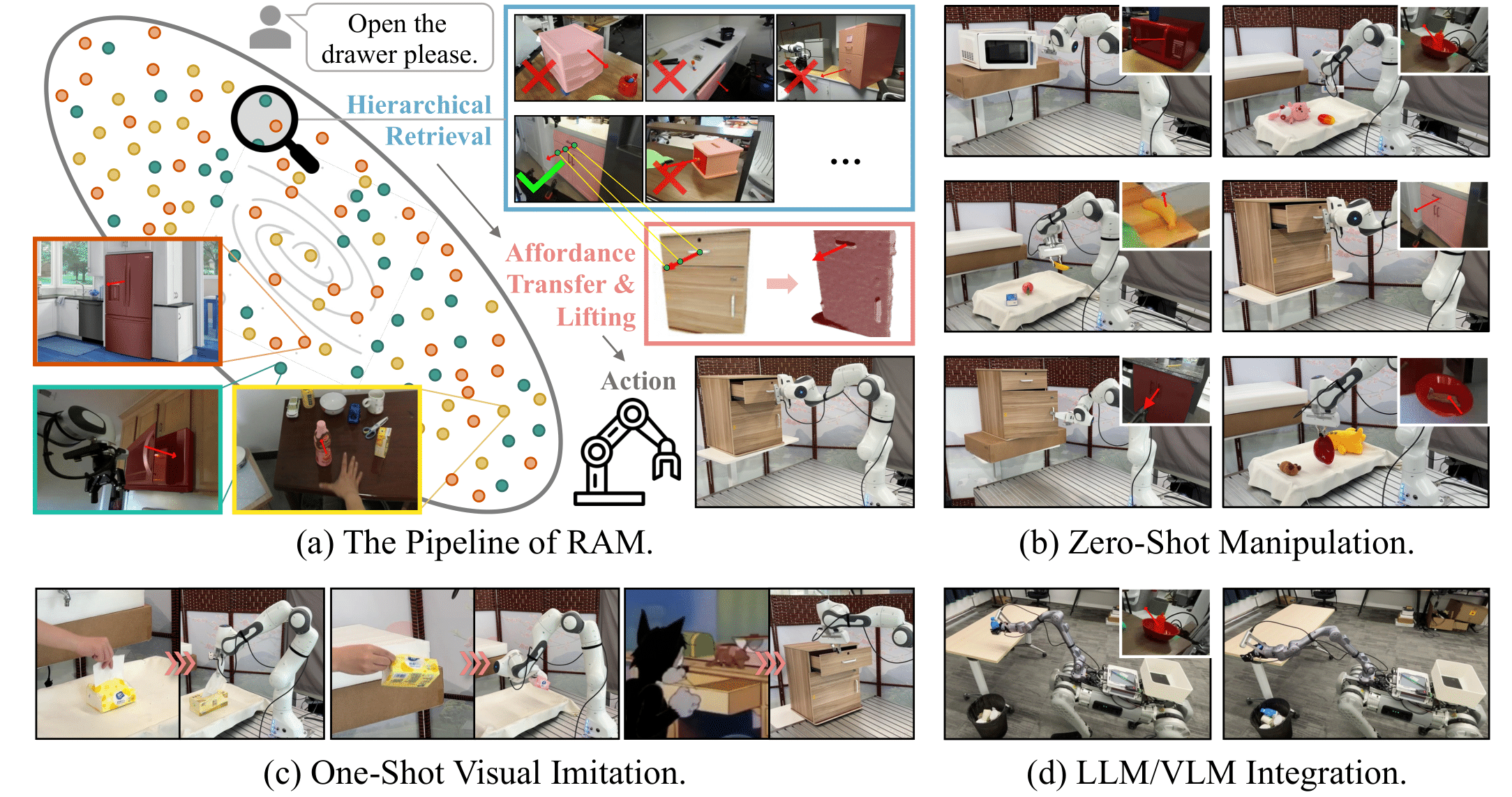 |
RAM: Retrieval-Based Affordance Transfer for Generalizable Zero-Shot Robotic Manipulation Yuxuan Kuang*, Junjie Ye*, Haoran Geng*, Jiageng Mao, Congyue Deng, Leonidas Guibas, He Wang, Yue Wang Paper /Project / Code Conference on Robot Learning (CoRL), 2024. (Oral Presentation, 4.5% acceptance rate) |
 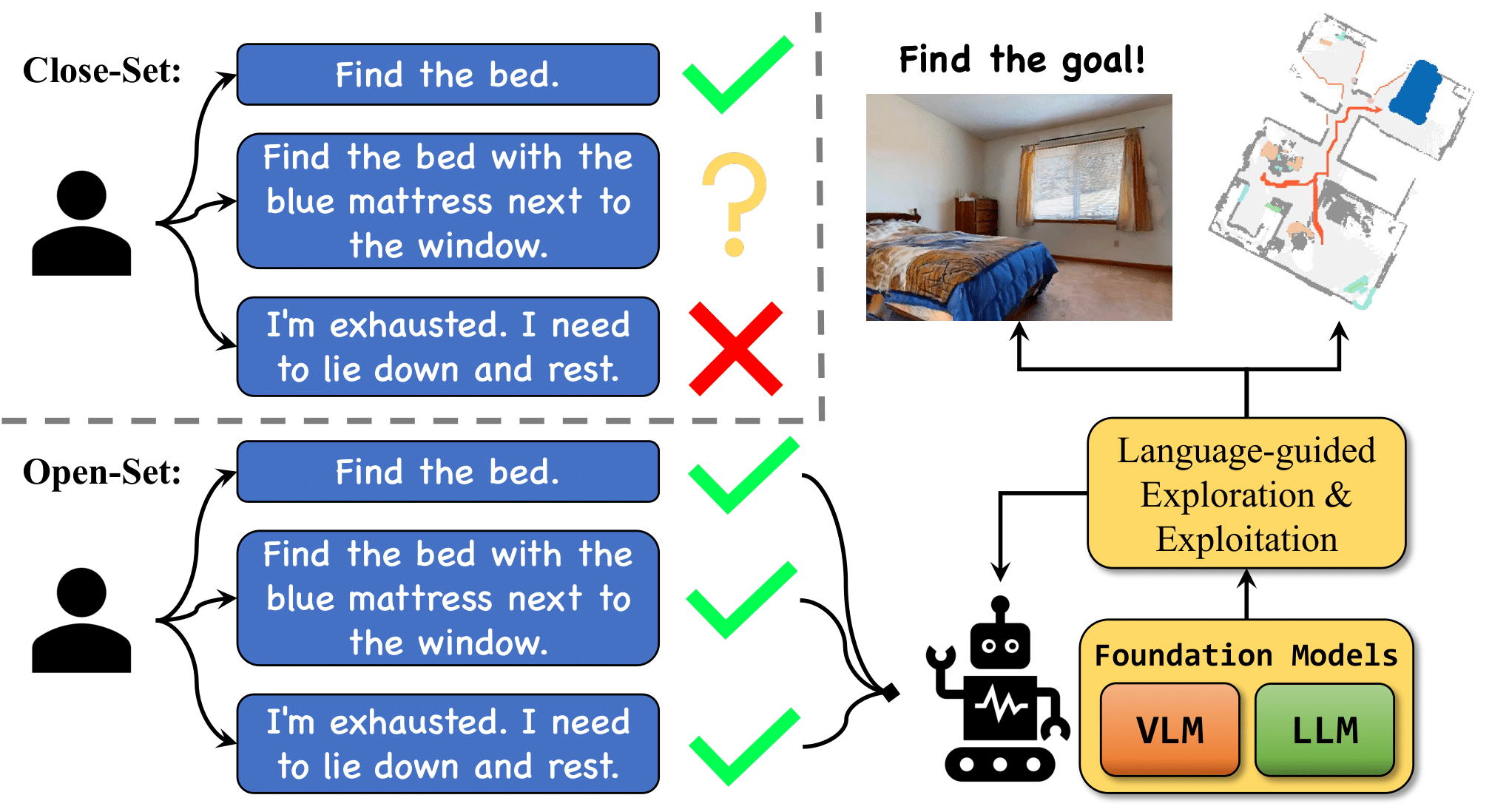 |
OpenFMNav: Towards Open-Set Zero-Shot Object Navigation via Vision-Language Foundation Models Yuxuan Kuang, Hai Lin, Meng Jiang Paper /Project / Code Findings of Annual Conference of the North American Chapter of the Association for Computational Linguistics (NAACL), 2024. |
 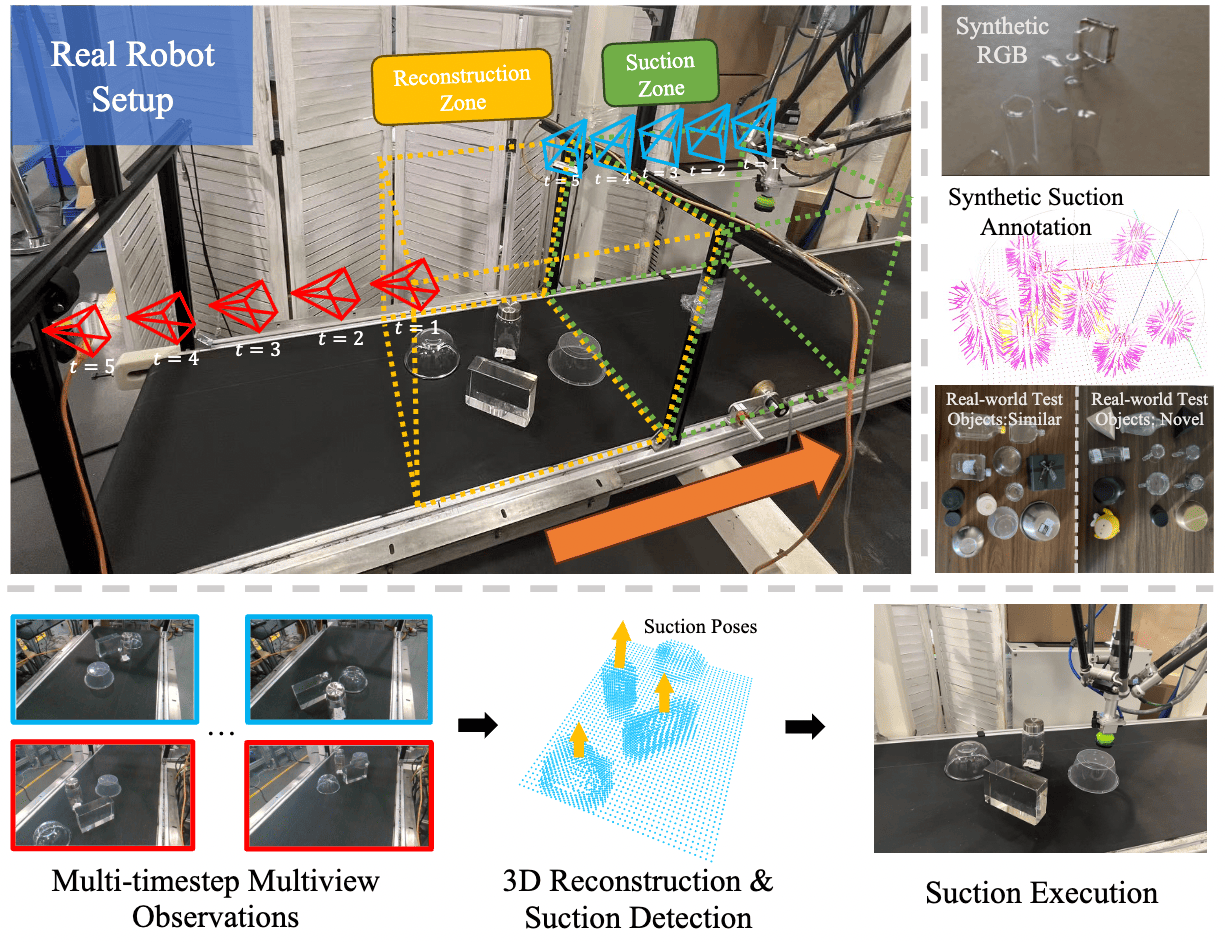 |
STOPNet: Multiview-based 6-DoF Suction Detection for Transparent Objects on Production Lines Yuxuan Kuang*, Qin Han*, Danshi Li, Qiyu Dai, Lian Ding, Dong Sun, Hanlin Zhao, He Wang† Paper /Project / Code International Conference on Robotics and Automation (ICRA), 2024. (Oral Presentation) |
Journal Reviewer: IJRR, RA-L
Conference Reviewer: RSS, ICML, CoRL, IROS
Teaching Assistant, Introduction to Computation (C), Fall 2024
Excellent Research Exhibition Award - Peking University - 2025
Academic Innovation Award - Peking University - 2024
Outstanding Research Award - Peking University - 2024
NG Teng Fong / Sino Scholarship - Peking University - 2023
1st Prize - The 34th Chinese Chemistry Olympiad - 2020
Last updated in March 2026.