detect - Detect objects using RTMDet object detector - MATLAB (original) (raw)
Detect objects using RTMDet object detector
Since R2024b
Syntax
Description
[bboxes](#mw%5Ff343d0d4-c299-4eae-827e-f08562d1f664) = detect([detector](#mw%5Fbf5b434c-2ce2-4b89-beb0-7650f9b8ded6),[I](#mw%5Fc00d6364-4a47-49b9-8d32-b9fe23b7792b)) detects objects within a single image or a batch of images, I, using an RTMDet object detector, detector. The detect function returns the locations of detected objects in the input image as a set of bounding boxes.
Note
This functionality requires Deep Learning Toolbox™ and the Computer Vision Toolbox™ Model for RTMDet Object Detection. You can install the Computer Vision Toolbox Model for RTMDet Object Detection from Add-On Explorer. For more information about installing add-ons, seeGet and Manage Add-Ons.
[[bboxes](#mw%5Ff343d0d4-c299-4eae-827e-f08562d1f664),[scores](#mw%5F2a3c80bd-a3b5-4553-9cda-827ea3dad003)] = detect([detector](#mw%5Fbf5b434c-2ce2-4b89-beb0-7650f9b8ded6),[I](#mw%5Fc00d6364-4a47-49b9-8d32-b9fe23b7792b)) returns the class-specific confidence scores for the bounding boxes along with their locations.
[[bboxes](#mw%5Ff343d0d4-c299-4eae-827e-f08562d1f664),[scores](#mw%5F2a3c80bd-a3b5-4553-9cda-827ea3dad003),[labels](#mw%5Fdc3dfa40-a261-4891-9643-845a159aa2aa)] = detect([detector](#mw%5Fbf5b434c-2ce2-4b89-beb0-7650f9b8ded6),[I](#mw%5Fc00d6364-4a47-49b9-8d32-b9fe23b7792b)) also returns a categorical array of labels assigned to the bounding boxes.
[detectionResults](#mw%5F8eaf28b5-1c97-4ea1-a75b-5ef86ed1d29a) = detect([detector](#mw%5Fbf5b434c-2ce2-4b89-beb0-7650f9b8ded6),[ds](#mw%5Fae59c329-381e-4da4-bdaa-d70e07d89e31)) returns a table of predicted objects for all the images in the input datastoreds.
[___] = detect(___,[roi](#mw%5F7e2991ed-03b1-49bc-9373-69a8e1cba48e)) detects objects within the rectangular region of interest roi, in addition to any combination of arguments from previous syntaxes.
[___] = detect(___,[Name=Value](#namevaluepairarguments)) specifies options using one or more name-value arguments. For example,Threshold=0.5 specifies a detection threshold of 0.5.
Examples
Specify the name of a pretrained RTMDet deep learning network.
modelname = "medium-network-coco";
Create an RTMDet object detector by using the pretrained RTMDet network.
detector = rtmdetObjectDetector(modelname);
Read a test image into the workspace, and detect objects in it by using the pretrained RTMDet object detector with a Threshold value of 0.55.
img = imread("boats.png"); [bboxes,scores,labels] = detect(detector,img,Threshold=0.55);
Display the bounding boxes and predicted class labels of the detected objects.
detectedImg = insertObjectAnnotation(img,"rectangle",bboxes,labels); figure imshow(detectedImg)

Load a pretrained RTMDet object detector.
detector = rtmdetObjectDetector("tiny-network-coco");
Read the test datastore, and store it as an image datastore object.
location = fullfile(matlabroot,"toolbox","vision","visiondata","stopSignImages"); imds = imageDatastore(location);
Detect objects in the test datastore. Set the Threshold value to 0.6 and MiniBatchSize value to 16.
detectionResults = detect(detector,imds,Threshold=0.6,MiniBatchSize=16);
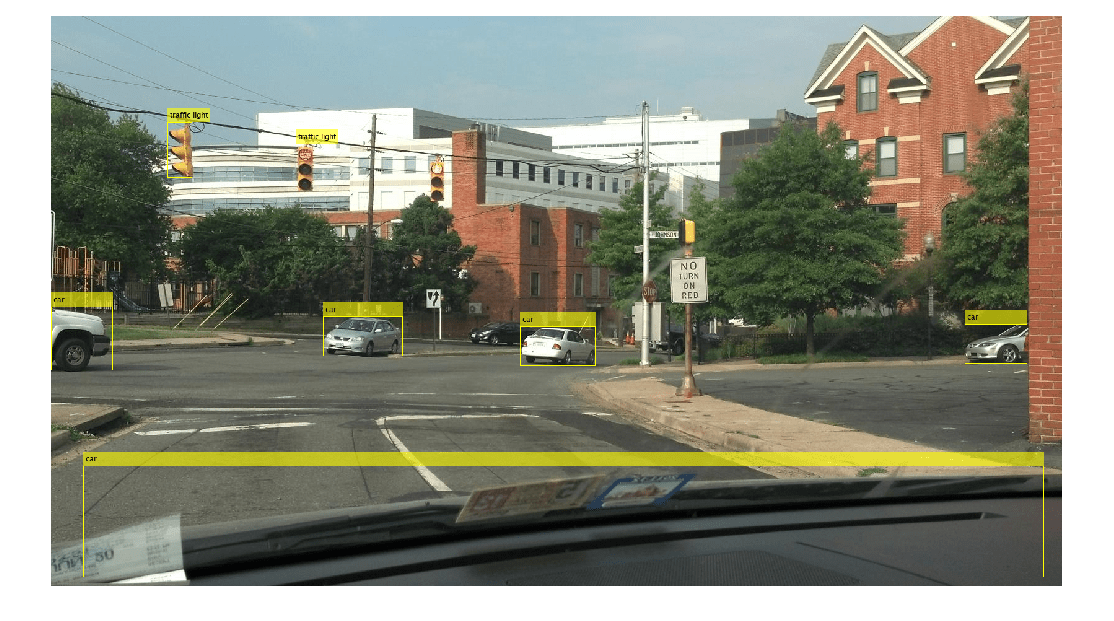
Read an image from the test data set, and extract the corresponding detection results.
num = 4; I = readimage(imds,num); bboxes = detectionResults.Boxes{num}; labels = detectionResults.Labels{num}; scores = detectionResults.Scores{num};
Display the table of detection results.
results = table(bboxes,labels,scores)
results=7×3 table bboxes labels scores ____________________________________ _____________ _______
189.3 171.7 40.215 90.083 traffic light 0.70336
1 470.09 99.577 103.39 car 0.65168
439.71 486.38 128.54 63.771 car 0.75719
758.23 502.11 122.35 63.529 car 0.71745
1476.4 498.05 100.52 63.998 car 0.6535
395.76 207.24 30.013 76.882 traffic light 0.67125
53.328 727.17 1550.7 180.05 car 0.61397Display the bounding boxes and predicted class labels of the detected objects in the image selected from the test datastore.
detectedImg = insertObjectAnnotation(I,"rectangle",bboxes,labels); figure imshow(detectedImg)
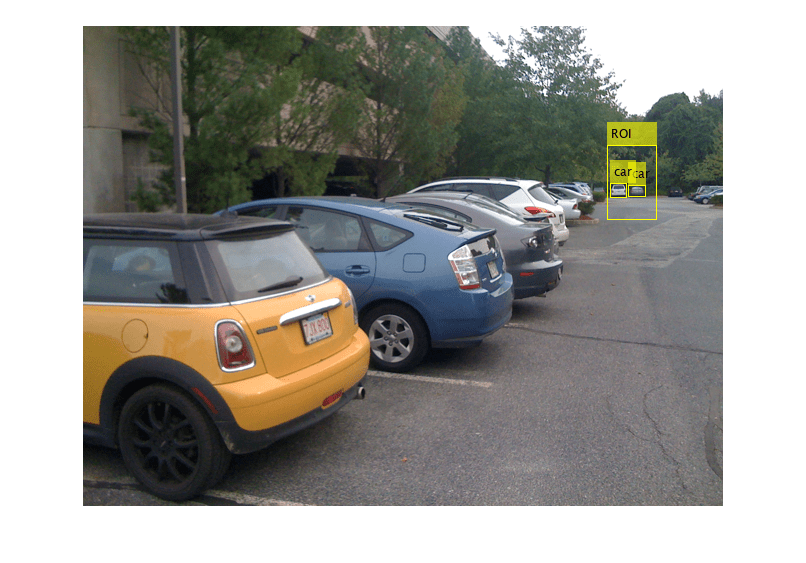
Load a pretrained RTMDet object detector.
detector = rtmdetObjectDetector("large-network-coco");
Read a test image.
img = imread("parkinglot_left.png");
Specify a rectangular region of interest (ROI) within the test image.
roiBox = [525 120 50 75];
Detect objects within the specified ROI.
[bboxes,scores,labels] = detect(detector,img,roiBox);
Display the bounding boxes and corresponding class labels of the detected objects within the ROI.
img = insertObjectAnnotation(img,"rectangle",roiBox,"ROI",AnnotationColor="yellow"); detectedImg = insertObjectAnnotation(img,"rectangle",bboxes,labels); figure imshow(detectedImg)
Input Arguments
Test images, specified as a numeric array of size_H_-by-_W_-by-C or_H_-by-_W_-by-_C_-by-B. You must specify real and nonsparse grayscale or RGB images.
- H — Height of the input images.
- W — Width of the input images.
- C — Number of channels. The channel size of each image must be equal to the input channel size of the network. For example, for grayscale images, C must be
1. For RGB color images, it must be3. - B — Number of test images in the batch. The
detectfunction computes the object detection results for each test image in the batch.
When the test image size does not match the network input size, the detector resizes the input image to the value of the [InputSize](rtmdetobjectdetector.html#mw%5F096532c7-d42c-4de9-921b-6b6a0b66fc2d) property of detector, unless you specify AutoResize as false.
The detector is sensitive to the range of the test image. Therefore, ensure that the test image range is similar to the range of the images used to train the detector. For example, if the detector was trained on uint8 images, rescale this input image to the range [0, 255] by using the im2uint8 or rescale function.
Data Types: uint8 | uint16 | int16 | double | single
Region of interest (ROI) to search, specified as a vector of form [x y width _height_]. The vector specifies the upper-left corner and size of a region, in pixels. If the input data is a datastore, the detect function applies the same ROI to every image.
Note
To specify the ROI to search, the AutoResize value must be true, enabling the function to automatically resize the input test images to the network input size.
Name-Value Arguments
Specify optional pairs of arguments asName1=Value1,...,NameN=ValueN, where Name is the argument name and Value is the corresponding value. Name-value arguments must appear after other arguments, but the order of the pairs does not matter.
Example: detect(detector,I,Threshold=0.25) specifies a detection threshold of 0.25.
Detection threshold, specified as a scalar in the range [0, 1]. The function removes detections that have scores less than this threshold value. To reduce false positives, at the possible expense of missing some detections, increase this value.
Strongest bounding box selection, specified as a numeric or logical1 (true) or 0 (false).
true— Returns only the strongest bounding box for each object. Thedetectfunction calls the selectStrongestBboxMulticlass function, which uses nonmaximal suppression to eliminate overlapping bounding boxes based on their confidence scores.
By default, thedetectfunction uses this call to theselectStrongestBboxMulticlass function.
selectStrongestBboxMulticlass(bboxes,scores, ...
RatioType="Union", ...
OverlapThreshold=0.45);false— Return all detected bounding boxes. You can write a custom function to eliminate overlapping bounding boxes.
Minimum region size containing an object, specified as a vector of the form [height _width_]. Units are in pixels. The minimum region size defines the size of the smallest object that the trained network can detect. When you know the minimum size, you can reduce computation time by setting MinSize to that value.
Maximum region size, specified as a vector of the form [height _width_]. Units are in pixels. The maximum region size defines the size of the largest object that the trained network can detect.
By default, MaxSize is set to the height and width of the input image I. To reduce computation time, set this value to the known maximum region size in which to detect objects in the input test image.
Minimum batch size, specified as a positive integer. Adjust theMiniBatchSize value to help process a large collection of images. The detect function groups images into minibatches of the specified size and processes them as a batch, which can improve computational efficiency at the cost of increased memory demand. Decrease the minibatch size to use less memory.
Automatic resizing of input images to preserve the aspect ratio, specified as a numeric or logical 1 (true) or0 (false). When AutoResize is set to true, the detect function resizes images to the nearest `InputSize` dimension, while preserving the aspect ratio. Set AutoResize to logical false or 0 when performing image tiling-based inference.
Hardware resource on which to run the detector, specified as one of these values:
"auto"— Use a GPU if Parallel Computing Toolbox™ is installed and a supported GPU device is available. Otherwise, use the CPU."gpu"— Use the GPU. To use a GPU, you must have Parallel Computing Toolbox and a CUDA® enabled NVIDIA® GPU. If a suitable GPU is not available, the function returns an error. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox)."cpu"— Use the CPU.
Performance optimization, specified as one of these options:
"auto"— Automatically apply a number of compatible optimizations suitable for the input network and hardware resource."mex"— Compile and execute a MEX function. This option is available only when using a GPU. Using a GPU requires Parallel Computing Toolbox and a CUDA-enabled NVIDIA GPU. If Parallel Computing Toolbox or a suitable GPU is not available, then thedetectfunction returns an error. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox)."none"— Do not use acceleration.
Using the Acceleration options "auto" and"mex" can offer performance benefits on subsequent calls with compatible parameters, at the expense of an increased initial run time. Use performance optimization when you plan to call the function multiple times using new input data.
The "mex" option generates and executes a MEX function based on the network and parameters used in the function call. You can have several MEX functions associated with a single network at one time. Clearing the network variable also clears any MEX functions associated with that network.
The "mex" option is available only for input data specified as a numeric array, cell array of numeric arrays, table, or image datastore. No other types of datastore support the "mex" option.
The "mex" option is available only when you are using a GPU. You must also have a C/C++ compiler installed. For setup instructions, see Set Up Compiler (GPU Coder).
"mex" acceleration does not support all layers. For a list of supported layers, see Supported Layers (GPU Coder).
Output Arguments
Locations of objects detected within the input image or images, returned as one of these options:
- _M_-by-4 matrix — Returned when the input is a single test image. M is the number of bounding boxes detected in an image. Each row of the matrix is of the form [x y width height_]. The x and y values specify the upper-left corner coordinates, and width and_height specify the size, of the corresponding bounding box, in pixels.
- _B_-by-1 cell array — Returned when the input is a batch of images, where B is the number of test images in the batch. Each cell in the array contains an _M_-by-4 matrix specifying the bounding boxes detected within the corresponding image.
Detection confidence scores for each bounding box in the range [0, 1], returned as one of these options:
- _M_-by-1 numeric vector — Returned when the input is a single test image. M is the number of bounding boxes detected in the image.
- _B_-by-1 cell array — Returned when the input is a batch of test images, where B is the number of test images in the batch. Each cell in the array contains an _M_-element row vector, where each element indicates the detection score for a bounding box in the corresponding image.
A higher score indicates higher confidence in the detection. The confidence score for each detection is a product of the corresponding objectness score and maximum class probability. The objectness score is the probability that the object in the bounding box belongs to a class in the image. The maximum class probability is the largest probability that a detected object in the bounding box belongs to a particular class.
Labels for bounding boxes, returned as one of these options:
- _M_-by-1 categorical vector — Returned when the input is a single test image. M is the number of bounding boxes detected in the image.
- _B_-by-1 cell array — Returned when the input is an array of test images. B is the number of test images in the batch. Each cell in the array contains an _M_-by-1 categorical vector containing the names of the object classes.
Detection results when the input is a datastore of test images, ds, returned as a table with these columns:
| bboxes | scores | labels |
|---|---|---|
| Predicted bounding boxes, defined in spatial coordinates as an _M_-by-4 numeric matrix with rows of the form [x y w _h_], where: M is the number of axis-aligned rectangles.x and y specify the upper-left corner coordinates of the rectangle, in pixels.w specifies the width of the rectangle, which is its length along the _x_-axis, in pixels.h specifies the height of the rectangle, which is its length along the _y_-axis, in pixels. | Class-specific confidence scores for each bounding box, returned as an _M_-by-1 numeric vector with values in the range[0, 1]. | Predicted object labels assigned to bounding boxes, returned as an_M_-by-1 categorical vector. All categorical data returned by the datastore must contain the same categories. |
Extended Capabilities
Version History
Introduced in R2024b