Embedded Coder Dictionary - Create code definitions to control code generation for model data and
functions - MATLAB ([original](https://www.mathworks.com/help/ecoder/ref/embeddedcoderdictionary.html)) ([raw](?raw))Main Content
Create code definitions to control code generation for model data and functions
Description
The Embedded Coder® Dictionary is a file that you use to store and control the code interface configuration. In the interface configuration, you create custom code interface definitions that define how the generated code interacts with the target platform software on which you deploy the code. By applying the configuration to models, you and your users can generate code that conforms to a specific software architecture by default. For example, you can create your own storage class, which you and your users can apply by default to a category of model data, such as root-level inputs, or to individual data elements, such as parameters.
A dictionary contains only one of these types of interface configurations:
- Data interface configuration — The code generator creates a program intended to run on the target device. The generated code uses the data interfaces that you define.
- Service interface configuration — The code generator creates an algorithm that you intend to deploy within a larger application. The platform middleware calls the algorithm code and provides the services for the target device. The generated code calls the services according to your definitions in the service interface configuration. To create a service interface configuration, you must use an Embedded Coder Dictionary that is stored in a Simulink® data dictionary.
In the interface configuration you can create these types of code interface definitions:
- Storage classes, which control the code generated for model data.
- Function customization templates, which control naming of model entry-point functions, such as
_`model`__step. The templates also apply memory sections to the entry-point functions. - Memory sections, which control the placement of data and functions in memory. The generated code includes custom decorations, such as pragmas, whose syntax you specify.
- Services, which control how the generated code calls services provided by the target platform software such as data transfer and timer services. Service definitions are available only in the service interface configuration.
For general information about creating code generation definitions, see Define Service Interfaces, Storage Classes, Memory Sections, and Function Templates for Software Architecture.
More
Open the Embedded Coder Dictionary
- To open an Embedded Coder Dictionary, in a model window, open the Embedded Coder app by opening the Apps gallery and clickingEmbedded Coder. On the C Code tab, select Code Interface > Embedded Coder Dictionary. The Embedded Coder Dictionary window displays the code interface configuration that is stored in the dictionary.
- To open the Embedded Coder Dictionary in a Simulink data dictionary, in the Model Explorer Model Hierarchy pane:
- Under the dictionary node, select the Embedded Coder node.
If you do not see the node, right-click the dictionary node and select Show Empty Sections. - In the Dialog pane (the right pane), clickOpen Embedded Coder Dictionary.
- Under the dictionary node, select the Embedded Coder node.
Examples
Create and Verify Storage Class
In a model, create a storage class that aggregates internal model data, including block states, into a structure whose characteristics you can control. Then, verify the storage class by generating code from the model.
- Open the model
RollAxisAutopilotby entering this in the MATLAB® Command Window:
openExample("RollAxisAutopilot"); - If the model does not open in the Embedded Coder app, open the app and click the C Code tab.
- On the C Code tab, select Code Interface > Embedded Coder Dictionary. The Embedded Coder Dictionary window displays code generation definitions that are stored in the model file.
- On the left pane, click Storage Class. In theStorage Classes section, clickCreate.
- Select the new storage class that appears at the bottom of the list,
StorageClass1. In the pane on the right, set the property values listed in this table.Property Value Name InternalStruct Header File internalData_$R.h Definition File internalData_$R.c Storage Type Structured Structure Properties > Type Name internalData_T_$M Structure Properties > Instance Name internalData_$M After making your changes, in the bottom pane, verify that the pseudocode preview reflects what you expect. - Return to the model editor. To open the Interface editor, below the canvas, double-click Code Mappings. On theData Defaults tab, expand theSignals section. Select the Signals, states, and internal data row and set Storage Class to
InternalStruct. - In the Configuration Parameters dialog box, on the Code Generation > Code Placement pane, setFile packaging format to
Modular. - Generate code.
- In the Simulink Editor Code view, open and inspect the file
internalData_RollAxisAutopilot.h. The file defines the structure typeinternalData_T_, whose fields represent block states in the model.
/* Storage class 'InternalStruct', for system '' /
typedef struct {
real32_T FixPtUnitDelay1_DSTATE; / '/FixPt Unit Delay1' /
real32_T Integrator_DSTATE; / '/Integrator' /
int8_T Integrator_PrevResetState; / '/Integrator' /
} internalData_T_;
The file also declares a global structure variable namedinternalData_.
/ Storage class 'InternalStruct' */
extern internalData_T_ internalData_; - Open and inspect the file
internalData_RollAxisAutopilot.c. The file allocates memory forinternalData_.
/* Storage class 'InternalStruct' */
internalData_T_ internalData_;
Create Function Customization Template
With a function template, you can specify a rule that governs the names of generated entry-point functions. This technique helps save time and maintenance effort in a model that has many entry-point functions, such as an export-function model or a multirate, multitasking model.
This example shows how to create a function template that specifies the naming rule func_$N_$R. $N is the base name of each generated function and $R is the name of the Simulink model.
- Open the example model
MultirateMultitaskingBareBoard. - Update the block diagram. This multitasking model has two execution rates, so the generated code includes two corresponding entry-point functions.
- In the model, set model configuration parameter System target file to
ert.tlc. To use a function customization template, you must use an ERT-based system target file. - In the Simulink Editor, open the Embedded Coder app and open the Embedded Coder Dictionary.
- In the Embedded Coder Dictionary, on the Function Customization Template tab, click Create.
- For the new function template, set these properties:
- Name to
myFunctions. - Function Name to
func_$N_$R.
After making your changes, verify that the pseudocode preview reflects what you expect.
- Name to
- In the model window, open the Code Mappings editor. On theFunction Defaults tab, for theInitialize/Terminate andExecution rows, set Function Customization Template to
myFunctions. - Generate code.
- In the Code view, open and inspect the file
MultirateMultitaskingBareBoard.c. The file defines the two execution functions,func_step0_MultirateMultitaskingBareBoardandfunc_step1_MultirateMultitaskingBareBoard, whose names conform to the rule that you specified in the function template.
For an example that shows how to create a memory section, see Control Data and Function Placement in Memory by Inserting Pragmas.
Create Storage Class for Use with Statically and Dynamically Initialized Data
This example shows how to create a storage class that places global variable definitions and declarations in files whose names depend on the model name. You create two copies of the storage class so that you can use one copy with parameter data (the data category Model parameters) and one copy with other data.
Typically, the generated code initializes parameter data statically, outside any function, and initializes other data dynamically, in the model initialization function. When you create a storage class by using the Custom Storage Class Designer or an Embedded Coder Dictionary, you set theData Initialization property to specify the initialization mechanism.
In an Embedded Coder Dictionary, for each storage class, you must selectStatic or Dynamic initialization. Consider creating one copy of the storage class for parameter data (Static) and one copy for other data (Dynamic).
Create Storage Class
- Open the model
RollAxisAutopilotby typing this command:
openExample("RollAxisAutopilot"); - If the C Code tab is not open, open the Embedded Coder app and click the C Code tab.
- Select Code Interface > Embedded Coder Dictionary.
- On the left pane, click Storage Class. In theStorage Classes section, clickCreate.
- For the new storage class, set these properties:
- Name to
SigsStates - Header File to
$R_my_data.h - Definition File to
$R_my_data.c - Data Initialization to
Dynamic
After making your changes, verify that the pseudocode preview reflects what you expect.
- Name to
- Place your cursor over the row for the storage classSigsStates and click Duplicate code definition. A new storage class,
SigsStates_copy, appears. - For the new storage class, set these properties:
- Name to
Params - Data Initialization to
Static
Verify that the pseudocode preview reflects what you expect.
- Name to
Apply Storage Class and Generate Code
- In the model, open the Code Mappings editor. Below the model canvas, double-click Code Mappings - Component Interface.
- On the Data Defaults tab, for the Parameters > Model Parameters row, in the Storage Class column, select
Params. - For the Signals > Signals, states, and internal data row, set Storage Class to
SigsStates. - Configure some parameter data elements in the model so that optimizations do not eliminate those elements from the generated code. On the Modeling tab, click Design > Model Workspace.
- In the Model Explorer, on the center pane, select the three rows that correspond to the variables
dispGain,intGain, andrateGainin the model workspace. - Right-click one of the rows and click
Convert to parameter object. The Model Data Editor converts the workspace variables toSimulink.Parameterobjects. - In the row for the parameter
dispGain, in theStorage Class column, clickConfigure. The model window highlights the row for thedispGainparameter in the Code Mappings editor. - For each variable, in the Storage Class column, select
Model default: Params, which means that they acquire the default storage class that you specified forModel parameters. - In the Configuration Parameters dialog box, on the Code Generation > Code Placement pane, set File packaging format to
Modular. - Generate code.
- In the Code view, open and inspect the files
RollAxisAutopilot_my_data.candRollAxisAutopilot_my_data.h. These files define and declare global variables that correspond to the parameter objects and some block states, such as the state of theIntegrator block in theBasicRollModesubsystem.
/* Storage class 'SigsStates' /
real32_T rtFixPtUnitDelay1_DSTATE;
real32_T rtIntegrator_DSTATE;
int8_T rtIntegrator_PrevResetState;
/ Storage class 'Params' */
real32_T dispGain = 0.75F;
real32_T intGain = 0.5F;
real32_T rateGain = 2.0F;
Refer to Code Generation Definitions in a Package
You can configure an Embedded Coder Dictionary to refer to code generation definitions that you store in a package (see Create Code Definitions for External Data Objects). Those definitions then appear available for selection in the Code Mappings editor. In this example, you configure the Embedded Coder Dictionary inRollAxisAutopilot to refer to definitions stored in the built-in example package ECoderDemos.
- Open the Embedded Coder Dictionary for
RollAxisAutopilot. For instructions, see Create and Verify Storage Class. - In the Embedded Coder Dictionary window, on theMemory tab, click Manage Packages.
- In the Manage Packages dialog box, click Refresh. Wait until more options appear in the Select package drop-down list.
- Set Select package to
ECoderDemosand clickLoad.
In the Embedded Coder Dictionary window, on the Storage Classes tab, the table shows the storage classes defined in theECoderDemospackage. Now, inRollAxisAutopilot, you can select these storage classes in the Code Mappings editor on the Data Defaults tab. - To unload the package, in the Manage Packages dialog box, select the package in the Select package drop-down list and clickUnload.
For an example that shows how to share code generation definitions between models by using data dictionaries, see Share Code Interface Configuration Between Models.
For an example that shows how to configure default code mappings in a shared Embedded Coder Dictionary, see Configure Default Code Mapping in a Shared Dictionary.
Related Examples
- Define Service Interfaces, Storage Classes, Memory Sections, and Function Templates for Software Architecture
- Deploy Code Generation Definitions
- Generate Code to Conform to Software Architecture by Sharing and Copying Default Settings Between Models
- Flexible Storage Class for Different Model Hierarchy Contexts
Parameters
These properties appear in the right pane in the Embedded Coder Dictionary window.
Storage Classes
Name — Name of storage class
StorageClass1 (default) | text
Description — Purpose and functionality of storage class
text
Custom text that you can use to describe the purpose and functionality of the storage class.
Data Source — Location of storage class definition
text
Data Access — Specification to access the data
Direct (default) | Function | Pointer
Specification to access data associated with the model. Access the data directly (Direct), through customizableget and set functions (Function), or by using a pointer (Pointer). For more information, see Access Data Through Functions by Using Storage Classes in Embedded Coder Dictionary.
Dependencies
- Setting this property to
Pointer:- Sets the
PreserveDimensionsproperty tofalse. To preserve dimensions of multidimensional arrays in the generated code, setDataAccesstoDirectorFunction.
- Sets the
- Setting this property to
FunctionorPointer:- Sets
DataScopetoImported. - Means that you cannot specify multi-instance properties.
- Sets
In addition, setting this property to Function enables these properties:
AccessModeAllowedAccessGetFunctionNameSetFunctionName
Data Scope — Specification to generate data definition
Exported (default) | Imported
Specification that the generated code define the data (Exported) or import (Imported) the data definition from external code. Built-in storage classes and storage classes in packages such as Simulink can use other scope options, such asFile.
Dependencies
- Setting this property to
Imported:- Disables Definition File. To include your external source code file in the build process, use model configuration parameters. For an example, see Configure Data Interface.
- Means that you cannot set Header File to
$N.h, though you can use the$Ntoken.
- To set this property to
Exported, you must use one of the tokens$Nor$Rin the value of Header File.
Header File — Name of header file that declares data
$N.h (default) | text
Name of the header file that declares the data, specified as a name or naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Name of associated data element |
| $G | Name of storage class |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
Dependencies
- If you set Data Scope to
Exported, you must use one of the tokens$Ror$Nin the value of this property. - If you set Data Scope to
Imported, you cannot set the value of this property to$N.h, but you can use the$Ntoken.
Definition File — Name of source file that defines data
$N.c (default) | text
Name of the source file that defines the data, specified as a name or naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Name of associated data element |
| $G | Name of storage class |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
Dependencies
Setting Data Scope toImported disables Definition File. To include your external source code file in the build process, use model configuration parameters. For an example, seeConfigure Data Interface.
Access Mode — Specification to access data through functions
Value (default) | Pointer
Allowed Access — Specification to allow access to data through functions
Read/Write (default) | Read Only | Write Only
Specification for the storage class to allow read and write (Read/Write), read-only (Read Only), or write-only (Write Only) access to the data.
Dependencies
This property is enabled only when you set Data Access to Function.
Name of Getter — Name of the get function that fetches the associated data
get_$N$M (default) | text
Name of the get function that fetches the associated data, specified as a name or naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $N | Name of associated data element (required) |
| $R | Name of root model |
| $M | Mangle text that ensures uniqueness |
| $U | User token text. See Identifier Format Control. |
Dependencies
This property is enabled only when you set Data Access to Function.
Name of Setter — Name of the set function that modifies the associated data
set_$N$M (default) | text
Name of the set function that fetches the modifies data, specified as a name or naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $N | Name of associated data element (required) |
| $R | Name of root model |
| $M | Mangle text that ensures uniqueness |
| $U | User token text. See Identifier Format Control. |
Dependencies
This property is enabled only when you set Data Access to Function.
Use different property settings for single-instance and multi-instance data — Specification to assign separate storage settings
off (default) | on
Specification for the storage class to use either the storage settings that you specify in the Single-instance storage section or the storage settings that you specify in the Multi-instance storage section. When you apply the storage class to a data item, the Embedded Coder Dictionary determines if it is a single-instance storage class or a multi-instance storage class by the type of data and by the context of the model within the model reference hierarchy.
Dependencies
Selecting this property enables the sections Single-instance storage and Multi-instance storage. The properties Storage Type, Type Name, and Instance Name appear in both the Single-instance storage andMulti-instance storage sections.
Storage Type — Specification to aggregate data into a structure
Unstructured (default) | Structured
Specification to aggregate the data that uses the storage class into a structure in the generated code. Each data element appears in the code as a field of the structure. To create a structure, useStructured.
Dependencies
Setting this property to Structured enablesType Name and Instance Name.
Type Name — Name of structure type
$R$N$G$M (default) | text
Name of the structure type in the generated code, specified as a name or a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Base name of associated function, such asstep |
| $G | Name of storage class |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
| $M | Name-mangling text inserted, if necessary, to avoid name collisions |
Dependencies
Setting Storage Type toStructured enables this property.
Instance Name — Name of structure variable
$N$G$M (default) | text
Name of the structure variable in the generated code, specified as a name or a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Base name of associated function, such asstep |
| $G | Name of storage class |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
| $M | Name-mangling text inserted, if necessary, to avoid name collisions |
Dependencies
Setting Storage Type toStructured enables this property.
Data Initialization — How to initialize data
Auto (default) |Dynamic | Static |None
Specification that the generated code initialize the data.
Auto— The generated code statically initializes parameter data and dynamically initializes signal and state data.Dynamic— The generated code initializes the data as part of the model initialization entry-point function.Static— The generated code initializes the data in the same statement that defines and allocates memory for the data. The assignment statement appears at the top of a.cor.cppsource file, outside of a function.None— The generated code does not initialize the data.
Dependencies
- If you select Const, you cannot set this property to
Dynamic. - Setting this property to
Dynamicdisables Const.
Memory Section — Location in memory to allocate data
None (default) | existing memory section
Preserve array dimensions — Specification to preserve dimensions of multidimensional arrays
off (default) | on
Const — Specification to apply const qualifier
off (default) | on
Specification to apply the const qualifier to the data.
Dependencies
- If you select this property, you cannot set Data Initialization to
Dynamic. - Setting Data Initialization to
Dynamicdisables this property.
Volatile — Specification to apply volatile qualifier
off (default) | on
Specification to apply the volatile qualifier to the data.
Other Qualifier — Specification to apply a custom qualifier
text
Parameters — Whether to allow usage with model parameters
off (default) | on
Specification indicating whether to allow usage of the storage class with model parameters.
Dependencies
- Setting Data Initialization to
Staticenables this property. - Setting Data Initialization to
Dynamicdisables this property. - To set the value of this property, set Data Initialization to
None.
Signals — Whether to allow usage with model signals
on (default) | off
Specification indicating whether to allow usage of the storage class with model signals.
Dependencies
- Setting Data Initialization to
Dynamicenables this property. - Setting Data Initialization to
Staticdisables this property. - To set the value of this property, set Data Initialization to
None.
Function Customization Templates
Name — Name of function template
FunctionTemplate1 (default) | text
Name of the template. The name must be unique among the function templates in the dictionary. Embedded Coder provides the built-in templates listed in this table.
Description — Purpose and functionality of function template
text
Custom text that you can use to describe the purpose and functionality of the function template.
Data Source — Location of function template definition
text
This parameter is read-only.
The location of the function template definition.
- Model name — Defined in a Simulink model.
- Dictionary name — Defined in a Simulink data dictionary (see What Is a Data Dictionary?).
Function Naming Rule — Names of generated functions
$R$N (default) | text
Names of the functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Base name of associated function, such asstep |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
| $C | For shared utility functions, a checksum inserted to avoid name collisions |
| $M | Name-mangling text inserted, if necessary, to avoid name collisions |
Memory Section — Location in memory to allocate function
None (default) | existing memory section
Header File — Name of header file that declares function
text
Definition File — Name of source file that defines function
text
Memory Sections
Name — Name of memory section
text
Name of the memory section. The name must be unique among the memory sections in the dictionary. Embedded Coder provides the built-in memory sections listed in this table.
| Memory Section | Description |
|---|---|
| MemConst | Apply the storage type qualifier const to the data. |
| MemVolatile | Apply the storage type qualifiervolatile to the data. |
| MemConstVolatile | Apply the storage type qualifiersconst and volatile to the data. |
Description — Purpose and functionality of memory section
text
Custom text that you can use to describe the purpose and functionality of the memory section.
Data Source — Location of memory section definition
text
Comment — Comment to insert in the generated code
text
Code comment that the code generator includes with the pragmas or other decorations that you specify with Pre Statement andPost Statement.
Pre Statement — Code to insert before data or function code
text
Code, such as pragmas, to insert before the definitions and declarations of the data or functions that are in the memory section.
You can use the token $R to represent the name of the model that uses the memory section.
When you set Statements Surround to Each variable, you can use the token $N to represent the name of each variable or function that uses the memory section.
Post Statement — Code to insert after data or function code
text
Code, such as pragmas, to insert after the definitions and declarations of the data or functions that are in the memory section.
You can use the token $R to represent the name of the model that uses the memory section.
When you set Statements Surround to Each variable, you can use the token $N to represent the name of each variable or function that uses the memory section.
Statements Surround — Specification to wrap data and functions separately or in a group
Each variable (default) | Group of variables
Specification to insert code statements (Pre Statement and Post Statement):
- Around each variable and function that uses the memory section. Select
Each variable. - Once, around the entire memory section. The generated code aggregates the variable and function definitions into a contiguous code block and surrounds the block with the statements. Select
Group of variables.
Receiver Service Interfaces
Since R2022b
Name — Name of receiver service
text
Name of the receiver service. Embedded Coder provides the example services listed in this table.
| Receiver Service | Description |
|---|---|
| ReceiverExample1 | Favor memory optimization over data freshness. The service reads data from another function before the function starts executing. |
| ReceiverExample2 | Favor data freshness over memory optimization. The service reads data from another function immediately during execution. |
| ReceiverExample3 | Use this option to maximize performance of component code or if mutual exclusion is inherent in component model design. The platform service reads data from generated function code directly by using memory that platform services manage for the target execution environment. |
Data Communication Method — How receiver data transmission is handled
Outside Execution (default) | During Execution | Direct Access
How receiver data transmission is handled between the target platform service and the run-time environment, specified as one of these options:
Outside Execution— Read data from another function before the function starts executing. Use this option to favor memory optimization over data freshness.During Execution— Read data from another function immediately during execution. The generated function code that calls the service must use a local buffer to maintain value coherence during execution. Use this option to favor data freshness over memory optimization.Direct Access— Read data from generated function code directly by using memory that platform services manage. Use this option to maximize performance of component code or if mutual exclusion is inherent in component model design.
Function Naming Rule — Names of generated receiver functions
text
Names of the receiver functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $G | Service name |
| $N | Element name |
| $X | Current callable function |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
| $M | Name-mangling text inserted to avoid name collisions |
Dependencies
To specify a function naming rule, you must set Data Communication Method to Outside Execution or During Execution.
Storage Class — Storage class definition
text
Storage class definition, specified as one of the definitions in theStorage Class section of the dictionary.
Dependencies
To specify a storage class receiver services, you must setData Communication Method to Direct Access.
Sender Service Interfaces
Since R2022b
Name — Name of sender service
text
Name of the sender service. Embedded Coder provides the example services listed in this table.
| Sender Service | Description |
|---|---|
| SenderExample1 | Favor data freshness over memory optimization. The platform service reads data from another function immediately during execution. |
| SenderExample2 | Favor memory optimization over data freshness. The service sends data to another function after the function executes. |
| SenderExample3 | Use this option to maximize performance of component code or if mutual exclusion is inherent in component model design. The platform service reads data from generated function code directly by using memory that platform services manage for the target execution environment. |
Data Communication Method — How sender data transmission is handled
Outside Execution (default) | During Execution | Direct Access
How sender data transmission is handled between the task and the run-time environment, specified as one of these options:
Outside Execution— Send data to another function before the function starts executing. Use this option to favor memory optimization over data freshness.During Execution— Send data to another function immediately during execution. The generated function code that calls the service must use a local buffer to maintain value coherence during execution. Use this option to favor data freshness over memory optimization.Direct Access— Send data to generated function code directly by using memory that platform services manage. Use this option to maximize performance of component code or if mutual exclusion is inherent in component model design.
Function Naming Rule for Value — Names of generated sender functions
text
Names of the sender functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $G | Service name |
| $N | Element name |
| $X | Current callable function |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
| $M | Name-mangling text inserted to avoid name collisions |
Dependencies
To specify a function naming rule, you must set Data Communication Method to Outside Execution or During Execution.
Function Naming Rule for Value by Reference — Names of generated sender functions that use reference
text
Names of the sender functions that send a value by reference in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $G | Service name |
| $X | Current callable function |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
Dependencies
To specify a function naming rule, the definition must be a data sender service and you must set Data Communication Method to Outside Execution orDuring Execution.
Storage Class — Storage class definition
text
Storage class definition, specified as one of the definitions in theStorage Class section of the dictionary.
Dependencies
To specify a storage class receiver services, you must setData Communication Method to Direct Access.
Data Transfer Service Interfaces
Since R2022b
Name — Name of data transfer service
text
Name of the data transfer service. Embedded Coder provides the example services listed in this table.
| Data Transfer Service | Description |
|---|---|
| DataTransferExample1 | Favor data freshness over memory optimization. The platform service reads data from another function immediately during execution. |
| DataTransferExample2 | Favor memory optimization over data freshness. The service receives and sends data from another function outside of function execution. |
Data Communication Method — How data transmission is handled
Outside Execution (default) | During Execution
How data transmission is handled between the task and the run-time environment, specified as one of these options:
Outside Execution— Communicate data to another function before the function starts executing. Use this option to favor memory optimization over data freshness.During Execution— Communicate data to another function immediately during execution. The generated function code that calls the service must use a local buffer to maintain value coherence during execution. Use this option to favor data freshness over memory optimization.
Receiver Function Naming Rule — Names of generated receiver functions
text
Names of the receiver functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Element name |
| $X | Current callable function |
| $M | Name-mangling text inserted to avoid name collisions |
Sender Function Naming Rule — Names of generated sender functions
text
Names of the sender functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $R | Name of root model |
| $N | Element name |
| $X | Current callable function |
| $M | Name-mangling text inserted to avoid name collisions |
Timer Services
Since R2022b
Name — Name of timer service
text
Name of the timer service. Embedded Coder provides the example service listed in this table.
| Timer Service | Description |
|---|---|
| TimerServiceExample1 | The timer service executes outside of function execution. |
Data Communication Method — How data transmission is handled
Outside Execution (default) | During Execution
How data transmission is handled between the task and the run-time environment, specified as one of these options:
Outside Execution— Communicate data to another function before the function starts executing. Use this option to favor memory optimization over data freshness.During Execution— Communicate data to another function immediately during execution. The generated function code that calls the service must use a local buffer to maintain value coherence during execution. Use this option to favor data freshness over memory optimization.
Function Clock Tick Function Naming Rule — Clock tick function naming rule
text
Names of the clock tick functions in the generated code, specified as a naming rule. A naming rule includes a combination of text and tokens. Valid tokens are listed in this table.
| Token | Description |
|---|---|
| $G | Service name |
| $X | Current callable function |
| $U | User token text, which you specify for a model as described in Identifier Format Control |
Dependencies
- If you create multiple timer services, use the
$Gtoken. - If you set Data Communication Method to
Outside Execution, use the$Xtoken.
Parameter Tuning Interfaces
Since R2022b
Name — Name of parameter tuning service
Not tunable (default) | text
The name of the tuning service for parameters that need to be tuned. If the parameters do not need to be tuned, Name has the default value, Not tunable.
Storage Class — Name of storage class definition
text
Name of storage class definition to use with the tuning service, specified as one of the compatible definitions in the Storage Class section of the dictionary.
Note
The Storage Class is not applicable for theNot tunable entry.
Parameter Argument Tuning Interfaces
Since R2022b
Name — Name of parameter argument tuning service
Not tunable (default) | text
The name of the tuning service for parameter arguments that need to be tuned. If the parameter arguments do not need to be tuned,Name has the default value, Not tunable.
Storage Class — Name of storage class definition
text
Name of storage class definition to use with the tuning service, specified as one of the compatible definitions in the Storage Class section of the dictionary.
Note
The Storage Class is not applicable for theNot tunable entry.
Measurement Service Interfaces
Since R2022b
Name — Name of measurement service
Not measured (default) | text
The name of the measurement service for signals, states, and internal data elements that need to be measured. If the signals, states, and internal data elements do not need to be measured, Name has the default value, Not measured.
Storage Class — Name of storage class definition
text
Name of storage class definition to use with the measurement service, specified as one of the compatible definitions in the Storage Class section of the dictionary.
Note
The Storage Class for the Not measured entry cannot be configured. Model elements that are specified as Not measured and cannot be optimized away will be generated according to theStorage Class specified for theInternal Data section in the dictionary.
Limitations
- A storage class or function customization template that you create in an Embedded Coder Dictionary cannot use a memory section that you load from a package (as described in Refer to Code Generation Definitions in a Package). Use a memory section defined in the Embedded Coder Dictionary.
- A storage class that you create in an Embedded Coder Dictionary that has
Functiondata access is not supported for the storage class of a data store, parameter argument tuning interface, or measurement interface. - You cannot create code generation definitions in a
.mdlmodel file.
For additional limitations for code generation definitions in the Embedded Coder Dictionary of a data dictionary (.sldd file), see Deploy Code Generation Definitions.
Version History
Introduced in R2018a
R2024a: Not measured and Not tunable as dictionary default
You can now specify Not measured as the default value of the Measurement Service Interfaces section in the coder dictionary, and you can specify Not tunable as the default value of the Parameter Tuning and Parameter Argument Tuning sections in the dictionary. The Not measured and Not tunable entries are included in the dictionary, and are preselected as default values in newly created dictionaries. You can select other entries as dictionary default for these sections, but you cannot delete these entries from the dictionary.
R2024a: Changes in service interfaces dictionary sections
- Constants and Internal Data are new dictionary sections.
- The dictionary sections Subcomponent Initialize and Terminate Functions and Subcomponent Periodic and Aperiodic Functions replace the section Subcomponent Functions.
R2022b: Create service interface configuration definition with service interfaces
When you create a shared coder dictionary in an SLDD file, you create either a data interface configuration or a service interface configuration definition in the dictionary:
- Service interface configuration — Create service interface definitions that describe the interfaces of the services that the platform middleware provides. The generated code uses the service interface definitions to generate calls to the services. You can define these new service interfaces:
- Initialize and terminate functions
- Periodic and aperiodic functions including model step functions
- Receiver service interfaces
- Sender service interfaces
- Data transfer service interfaces
- Timer service interfaces
- Parameter tuning service interfaces
- Parameter argument tuning service interfaces
- Measurement service interfaces
- Subcomponent functions
- Shared utility functions
In the service interface configuration, you can still define storage classes and memory sections and apply them to service interface definitions.
- Data interface configuration — The generated code uses the data and function interfaces that you define.
Existing Embedded Coder Dictionaries contain a data interface configuration with the code definitions.
R2022b: Dictionary refreshes when you load model from earlier release
Package-based code definitions have changed. If your Embedded Coder Dictionary refers to code definitions that you store in a package, the dictionary refreshes when you load a model from an earlier release. To prevent the dictionary refresh, resave the model, or the Simulink data dictionary that contains the Embedded Coder Dictionary, in the current release.
R2021b: Pointer data access for storage classes
When you create an unstructured storage class, you can configure the storage class to use pointer data access. Set Data Scope toImported and set Data Access toPointer.
R2021a: Automatic data initialization for storage classes
For new storage classes, the default Data Initialization setting is now Auto. With this setting, you can apply the same storage class to signals, states, and parameters. The generated code statically initializes parameter data and dynamically initializes signal and state data.
Previously, the options for the Data Initialization setting were limited to Dynamic, Static, andNone.
R2020a: $R token for memory sections
You can now use the $R token in the Pre Statement and Post Statement for a memory section. $R expands to the model name. Previously, you could use only the $N token for memory sections. $N expands to the name of the data element or function.
R2019a: Preserve array dimensions in storage classes
To preserve the dimensions of array data that uses a storage class, select thePreserve array dimensions property for the storage class.
R2019a: get and set data access for storage classes
You can now define a storage class for root-level inports, root-level outports, and local parameters so that they can be accessed by customizableget and set functions. Set the newData Access property to Function. You can also configure these new properties:
- Access Mode — Whether the access functions return data by value or by pointer
- Allowed Access — Whether to allow read and write access, read-only access, or write-only access to the data
- Name of Getter — Naming rules for the
getfunctions - Name of Setter — Naming rules for the
setfunctions
R2019a: Storage classes with different settings for single-instance and multi-instance data
You can now create storage classes that use different settings for single-instance and multi-instance data. Select the new property Use different property settings for single-instance and multi-instance data. For single-instance data, you can specify the storage type and structure properties. You can separately specify the structure properties for multi-instance data.
When you apply the storage class to a data item, the Embedded Coder Dictionary implements either the single-instance settings or the multi-instance settings depending on the type of data and the context of the model within the model reference hierarchy.
R2019a: Load multiple packages in one dictionary
You can now load and refer to code definitions from multiple packages in one dictionary.
R2019a: Use code definitions from local and shared Embedded Coder Dictionaries
When a shared Embedded Coder Dictionary is attached to the model, the model can use the code definitions from both the shared dictionary and the local Embedded Coder Dictionary of the model. The local Embedded Coder Dictionary of the model displays the shared definitions as read-only.
R2018b: Restrict mapping of storage classes to parameters or signals
Specify whether users can map a storage class to parameters, signals, or parameters and signals. To allow users to map a storage class to each category, select one or both of the new properties Parameters andSignals.
R2018b: Select default definitions in shared Embedded Coder Definitions
For a shared Embedded Coder Dictionary, which is saved in an SLDD file, you can select the default code definition for each category of data or functions.
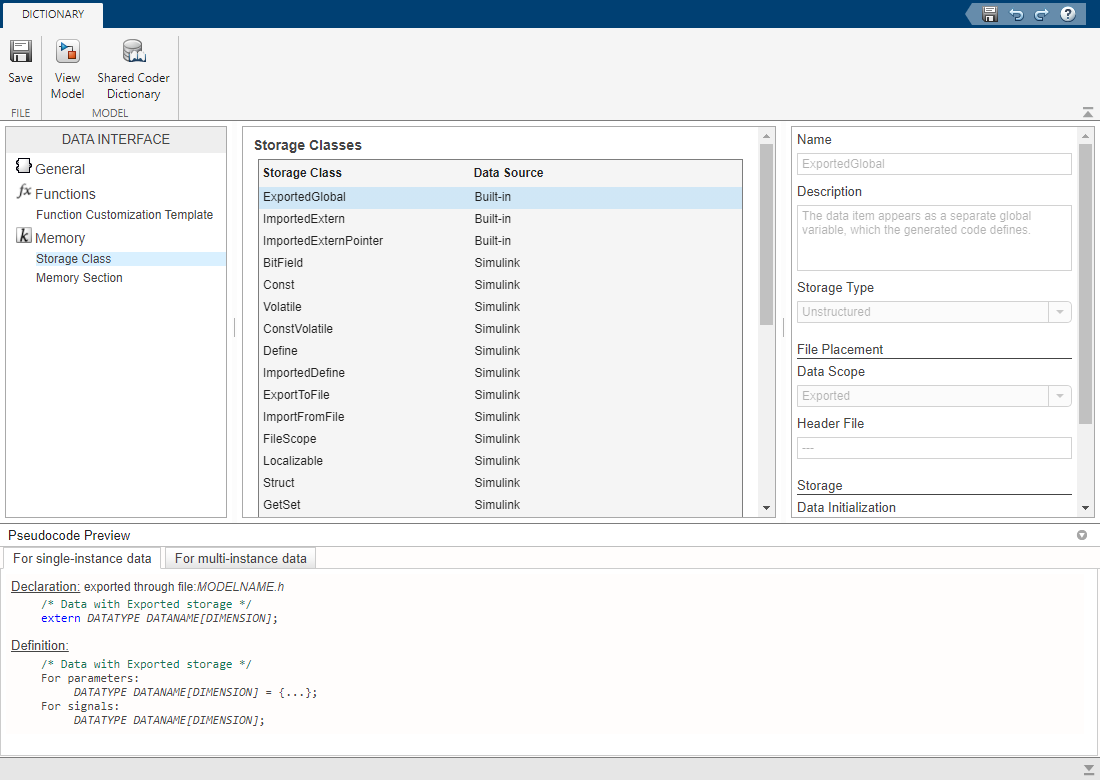
R2018b: Pseudocode preview for code definitions
When you create a code definition in the Embedded Coder Dictionary, you can view a pseudocode preview of the code that will generate for the function or data item that uses the code definition.
![]()