Chang Yu (original) (raw)
Research 
My research focuses on physical AI infrastructure and robotics learning: massively parallel, high-fidelity simulation systems that turn physics-grounded world generation, robot interaction, and real-world feedback into scalable manipulation policies.
* Equal contributions; † Project lead.
| | TacCoRL: Integrating Tactile Feedback into VLA via Simulation Siyu Ma*, Yuqi Liang*,Chang Yu*†, Yunuo Chen, Hao Su, Yixin Zhu, Yin Yang, Chenfanfu Jiang. arXiv arXiv |project page | | | |
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ----------------------------------------------------------------------------- | ----------------------------------------------------------------------------------------------------------------------- |
| 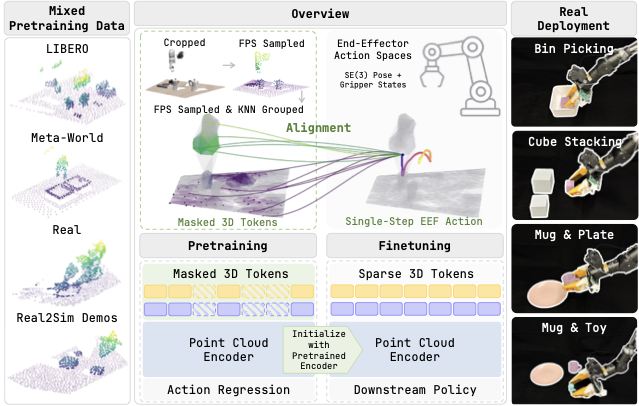 | Sparse2Act: Learning Action-Aligned Sparse 3D Representations for Cross-Domain Robot Manipulation Yu Guo*,Chang Yu*, Siyu Ma*, Yunuo Chen, Yin Yang, Ying Nian Wu, Chenfanfu Jiang. arXiv arXiv |project page | | |
| | MemoryVAM: Integrating Memory into Video Action Model for Robot Manipulation Yuxin Jiang*,Chang Yu*, Yunuo Chen, Xiang Feng, Yin Yang, Nishank Gite, Chenfanfu Jiang. arXiv | | | |
|
| Sparse2Act: Learning Action-Aligned Sparse 3D Representations for Cross-Domain Robot Manipulation Yu Guo*,Chang Yu*, Siyu Ma*, Yunuo Chen, Yin Yang, Ying Nian Wu, Chenfanfu Jiang. arXiv arXiv |project page | | |
| | MemoryVAM: Integrating Memory into Video Action Model for Robot Manipulation Yuxin Jiang*,Chang Yu*, Yunuo Chen, Xiang Feng, Yin Yang, Nishank Gite, Chenfanfu Jiang. arXiv | | | |
|  | SAP Warp: GPU-accelerated Semi-Analytic Primal Solver for Compliant Frictional Contact Open-Source Project Yunuo Chen, Xiang Feng,Chang Yu, Yin Yang, Joseph Masterjohn, Chenfanfu Jiang. 2026 project page |code | | |
|
| SAP Warp: GPU-accelerated Semi-Analytic Primal Solver for Compliant Frictional Contact Open-Source Project Yunuo Chen, Xiang Feng,Chang Yu, Yin Yang, Joseph Masterjohn, Chenfanfu Jiang. 2026 project page |code | | |
| 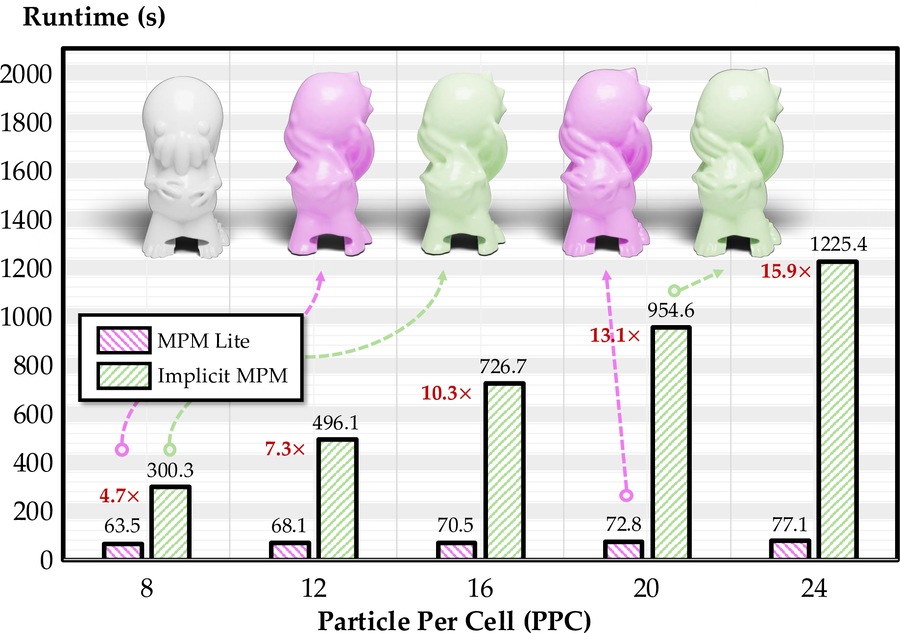 | MPM Lite: Linear Kernels and Integration without Particles Xiang Feng*, Yunuo Chen*,Chang Yu*, Hao Su, Demetri Terzopoulos, Yin Yang, Joe Masterjohn, Alejandro Castro, Chenfanfu Jiang. ACM Transactions On Graphics (SIGGRAPH), 2026 Technical Paper Trailer arXiv |project page | code | video |
| | Right-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal Chang Yu*, Siyu Ma*, Wenxin Du, Zeshun Zong, Han Xue, Wendi Chen, Cewu Lu, Yin Yang, Xuchen Han, Joseph Masterjohn, Alejandro Castro, Chenfanfu Jiang IEEE International Conference on Robotics and Automation (ICRA), 2026 arXiv | project page | video | | |
|
| MPM Lite: Linear Kernels and Integration without Particles Xiang Feng*, Yunuo Chen*,Chang Yu*, Hao Su, Demetri Terzopoulos, Yin Yang, Joe Masterjohn, Alejandro Castro, Chenfanfu Jiang. ACM Transactions On Graphics (SIGGRAPH), 2026 Technical Paper Trailer arXiv |project page | code | video |
| | Right-Side-Out: Learning Zero-Shot Sim-to-Real Garment Reversal Chang Yu*, Siyu Ma*, Wenxin Du, Zeshun Zong, Han Xue, Wendi Chen, Cewu Lu, Yin Yang, Xuchen Han, Joseph Masterjohn, Alejandro Castro, Chenfanfu Jiang IEEE International Conference on Robotics and Automation (ICRA), 2026 arXiv | project page | video | | |
| 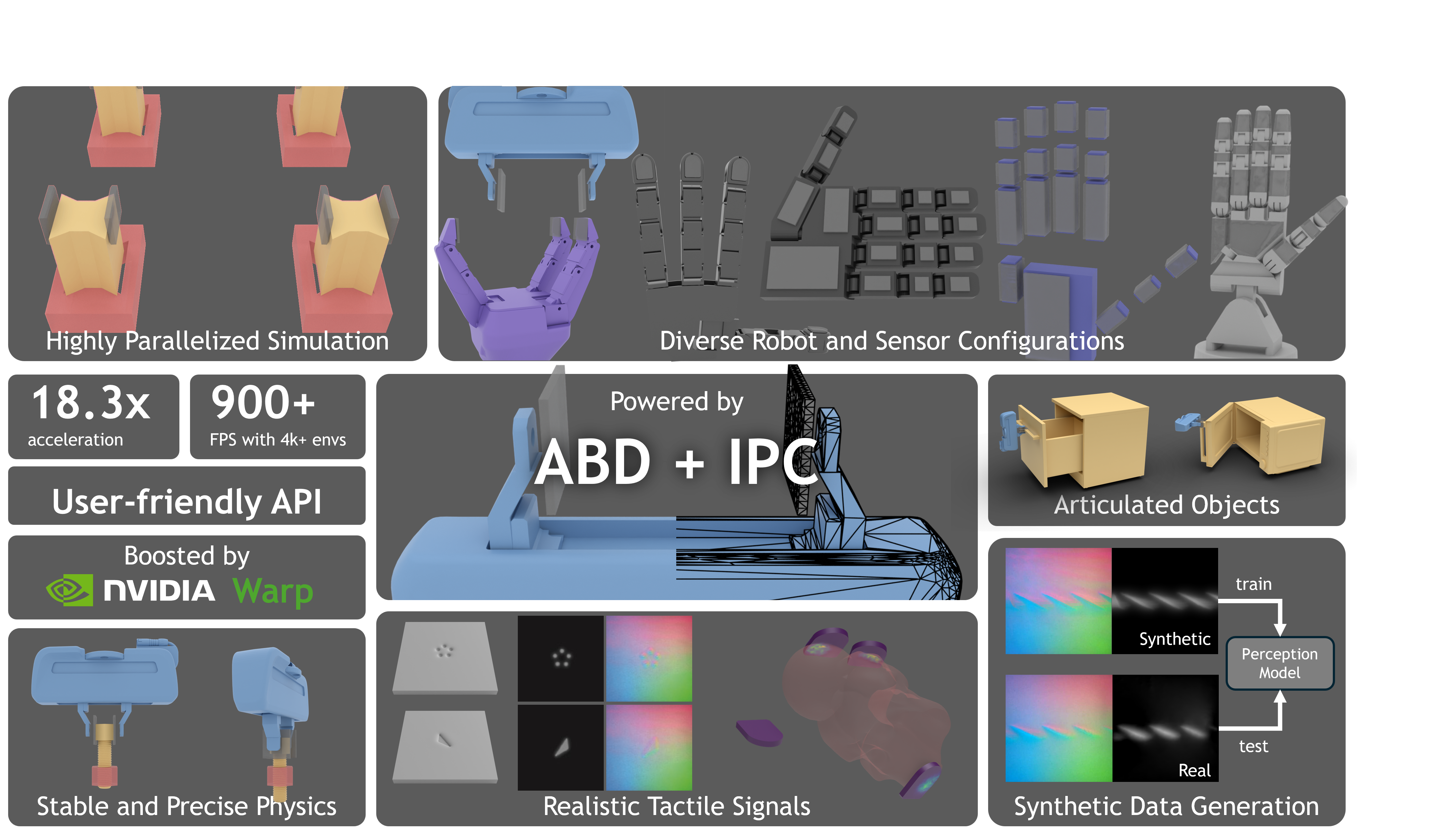 | Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation Yuyang Li*, Wenxin Du*,Chang Yu*, Puhao Li, Zihang Zhao, Tengyu Liu, Chenfanfu Jiang, Yixin Zhu, Siyuan Huang Neural Information Processing Systems (NeurIPS), 2025 Spotlight arXiv | project page | code | video |
|
| Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation Yuyang Li*, Wenxin Du*,Chang Yu*, Puhao Li, Zihang Zhao, Tengyu Liu, Chenfanfu Jiang, Yixin Zhu, Siyuan Huang Neural Information Processing Systems (NeurIPS), 2025 Spotlight arXiv | project page | code | video |
|  | Physics-Based Simulation Minchen Li, Chenfanfu Jiang, Zhaofeng Luo, Wenxin Du,Chang Yu, Žiga Kovačič, Tianyi Xie Open-Source Online Book, 2025 book | code | | |
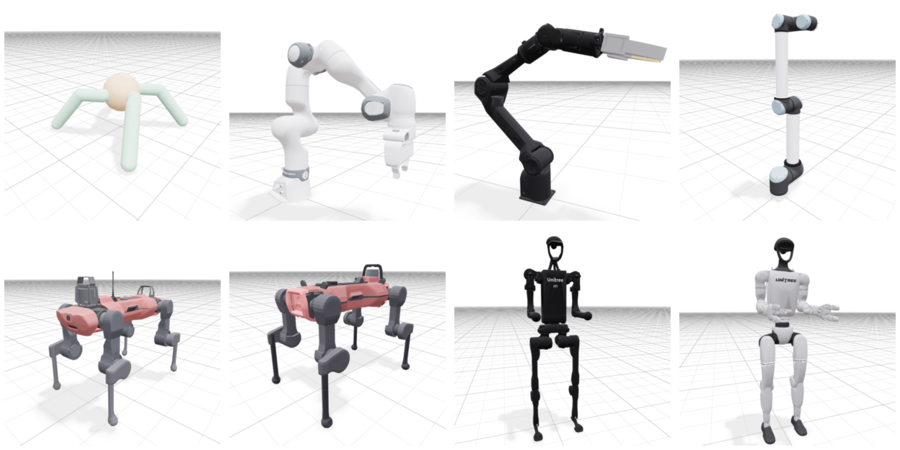
| | GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled Grasping Siyu Ma*, Wenxin Du*,Chang Yu*, Ying Jiang*, Zeshun Zong, Tianyi Xie, Yunuo Chen, Yin Yang, Xuchen Han, Chenfanfu Jiang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 arXiv | project page | video | | |
| | A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive Simulation Chang Yu*, Wenxin Du*, Zeshun Zong, Alejandro Castro, Chenfanfu Jiang, Xuchen Han IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 Best Poster Finalist @ IROS 2025 Workshop ROMADO arXiv | code | video | | |
|
| Physics-Based Simulation Minchen Li, Chenfanfu Jiang, Zhaofeng Luo, Wenxin Du,Chang Yu, Žiga Kovačič, Tianyi Xie Open-Source Online Book, 2025 book | code | | |
| | GRIP: A General Robotic Incremental Potential Contact Simulation Dataset for Unified Deformable-Rigid Coupled Grasping Siyu Ma*, Wenxin Du*,Chang Yu*, Ying Jiang*, Zeshun Zong, Tianyi Xie, Yunuo Chen, Yin Yang, Xuchen Han, Chenfanfu Jiang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 arXiv | project page | video | | |
| | A Convex Formulation of Material Points and Rigid Bodies with GPU-Accelerated Async-Coupling for Interactive Simulation Chang Yu*, Wenxin Du*, Zeshun Zong, Alejandro Castro, Chenfanfu Jiang, Xuchen Han IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 Best Poster Finalist @ IROS 2025 Workshop ROMADO arXiv | code | video | | |
| 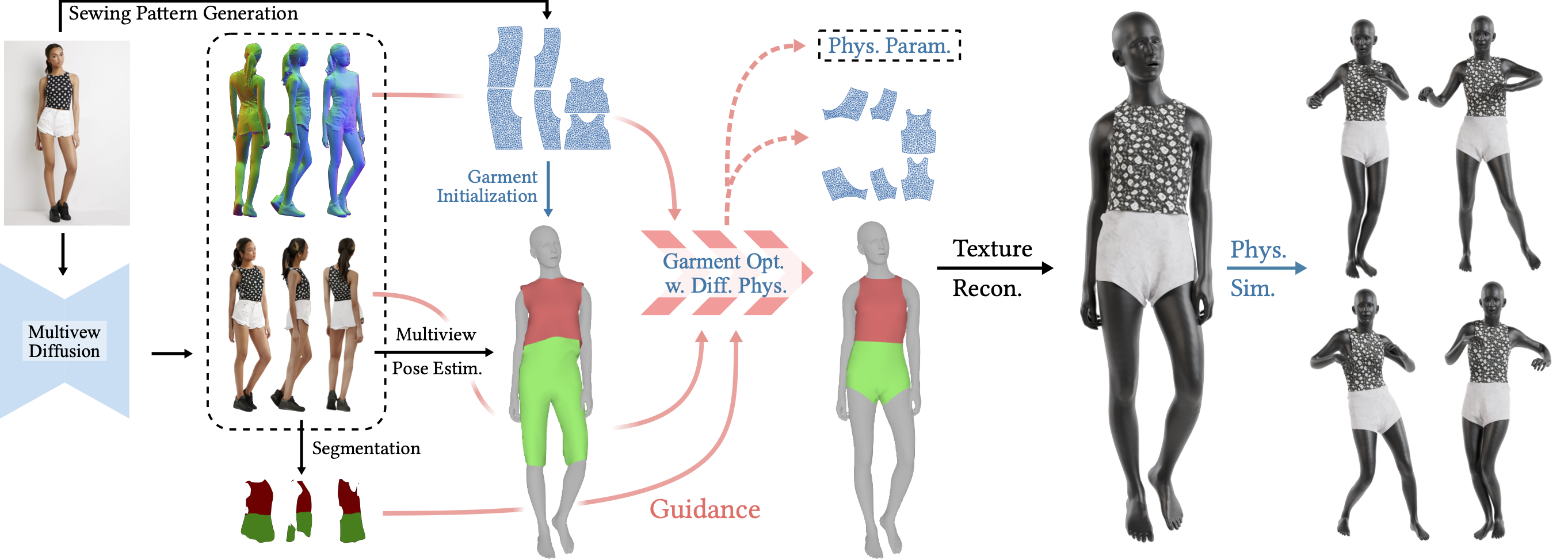 | Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable Physics Xuan Li*,Chang Yu*, Wenxin Du*, Ying Jiang*, Tianyi Xie, Yunuo Chen, Yin Yang, Chenfanfu Jiang ACM Transactions On Graphics (SIGGRAPH), 2025 arXiv | project page | | |
|
| Dress-1-to-3: Single Image to Simulation-Ready 3D Outfit with Diffusion Prior and Differentiable Physics Xuan Li*,Chang Yu*, Wenxin Du*, Ying Jiang*, Tianyi Xie, Yunuo Chen, Yin Yang, Chenfanfu Jiang ACM Transactions On Graphics (SIGGRAPH), 2025 arXiv | project page | | |
|  | ARM: Appearance Reconstruction Model for Relightable 3D Generation Xiang Feng*,Chang Yu*, Zoubin Bi*, Yintong Shang, Feng Gao, Hongzhi Wu, Kun Zhou, Chenfanfu Jiang, Yin Yang. Conference on Computer Vision and Pattern Recognition (CVPR), 2025 Highlight arXiv | project page | | |
|
| ARM: Appearance Reconstruction Model for Relightable 3D Generation Xiang Feng*,Chang Yu*, Zoubin Bi*, Yintong Shang, Feng Gao, Hongzhi Wu, Kun Zhou, Chenfanfu Jiang, Yin Yang. Conference on Computer Vision and Pattern Recognition (CVPR), 2025 Highlight arXiv | project page | | |
| 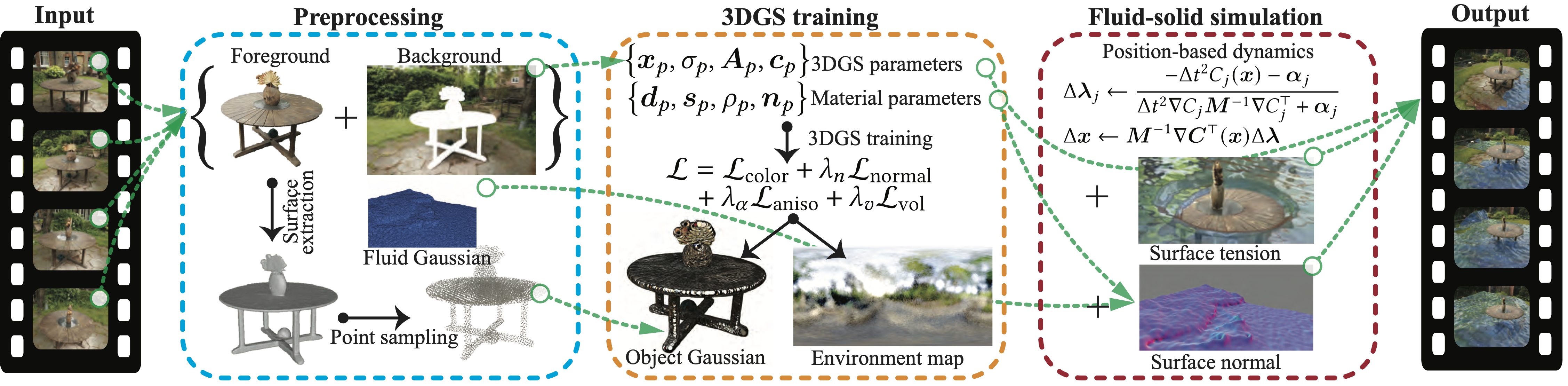 | Gaussian Splashing: Unified Particles for Versatile Motion Synthesis and Rendering Yutao Feng*, Xiang Feng*, Yintong Shang, Ying Jiang,Chang Yu, Zeshun Zong, Tianjia Shao, Hongzhi Wu, Kun Zhou, Chenfanfu Jiang, Yin Yang. Conference on Computer Vision and Pattern Recognition (CVPR), 2025 arXiv | project page | | |
| | Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot Manipulation Wenxin Du*,Chang Yu*, Siyu Ma, Ying Jiang, Zeshun Zong, Ying Yang, Joseph Masterjohn, Alejandro Castro, Xuchen Han, Chenfanfu Jiang. IEEE International Conference on Robotics and Automation (ICRA), 2025 arXiv | project page | video | | |
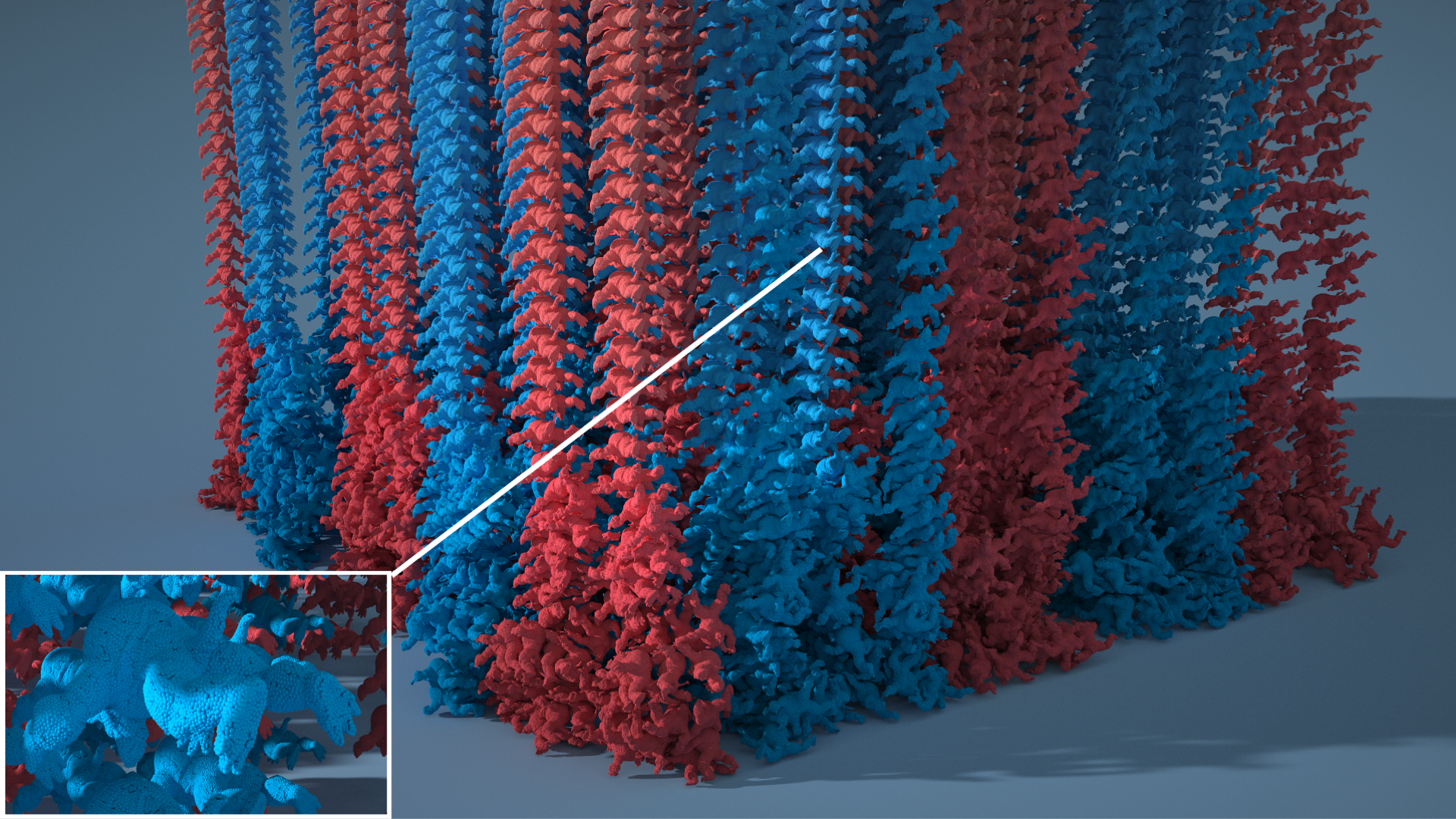
| | XPBI: Position-Based Dynamics with Smoothing Kernels Handles Continuum Inelasticity Chang Yu*, Xuan Li*, Lei Lan, Ying Yang, Chenfanfu Jiang. SIGGRAPH Asia, 2024 arXiv | video | | | |
|
| Gaussian Splashing: Unified Particles for Versatile Motion Synthesis and Rendering Yutao Feng*, Xiang Feng*, Yintong Shang, Ying Jiang,Chang Yu, Zeshun Zong, Tianjia Shao, Hongzhi Wu, Kun Zhou, Chenfanfu Jiang, Yin Yang. Conference on Computer Vision and Pattern Recognition (CVPR), 2025 arXiv | project page | | |
| | Embedded IPC: Fast and Intersection-free Simulation in Reduced Subspace for Robot Manipulation Wenxin Du*,Chang Yu*, Siyu Ma, Ying Jiang, Zeshun Zong, Ying Yang, Joseph Masterjohn, Alejandro Castro, Xuchen Han, Chenfanfu Jiang. IEEE International Conference on Robotics and Automation (ICRA), 2025 arXiv | project page | video | | |
| | XPBI: Position-Based Dynamics with Smoothing Kernels Handles Continuum Inelasticity Chang Yu*, Xuan Li*, Lei Lan, Ying Yang, Chenfanfu Jiang. SIGGRAPH Asia, 2024 arXiv | video | | | |
|  | VR-GS: A Physical Dynamics-Aware Interactive Gaussian Splatting System in Virtual Reality Ying Jiang*,Chang Yu*, Tianyi Xie*, Xuan Li*, Yutao Feng, Huamin Wang, Minchen Li, Henry Lau, Feng Gao, Yin Yang, Chenfanfu Jiang SIGGRAPH, 2024 arXiv | project page | video | |
|
| VR-GS: A Physical Dynamics-Aware Interactive Gaussian Splatting System in Virtual Reality Ying Jiang*,Chang Yu*, Tianyi Xie*, Xuan Li*, Yutao Feng, Huamin Wang, Minchen Li, Henry Lau, Feng Gao, Yin Yang, Chenfanfu Jiang SIGGRAPH, 2024 arXiv | project page | video | |
|  | MeshTaichi: A Compiler for Efficient Mesh-based Operations Chang Yu*, Yi Xu*, Ye Kuang, Yuanming Hu, Tiantian Liu ACM Transactions On Graphics (SIGGRAPH Asia), 2022 arXiv | project page | video | |
|
| MeshTaichi: A Compiler for Efficient Mesh-based Operations Chang Yu*, Yi Xu*, Ye Kuang, Yuanming Hu, Tiantian Liu ACM Transactions On Graphics (SIGGRAPH Asia), 2022 arXiv | project page | video | |
|  | Real-time Physics Engine Based on MPM & PBD Yilong Wu*,Chang Yu* International Conference on Virtual Reality and Visualization (ICVRV), 2020 project page | | |
| Real-time Physics Engine Based on MPM & PBD Yilong Wu*,Chang Yu* International Conference on Virtual Reality and Visualization (ICVRV), 2020 project page | | |
Experience 
Design and source code from Jon Barron.
Last updated: Jun 14, 2026