Traffic Sign Detection and Recognition - MATLAB & Simulink (original) (raw)
This example shows how to generate CUDA® MEX code for a traffic sign detection and recognition application that uses deep learning. Traffic sign detection and recognition is an important application for driver assistance systems, aiding and providing information to the driver about road signs.
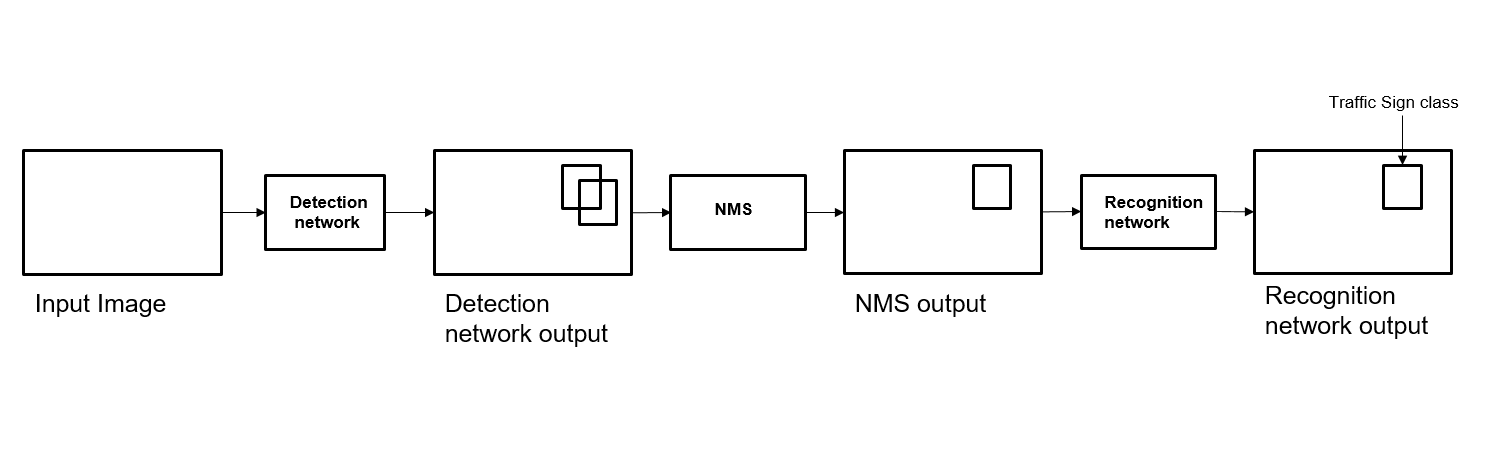
In this traffic sign detection and recognition example you perform three steps - detection, Non-Maximal Suppression (NMS), and recognition. First, the example detects the traffic signs on an input image by using an object detection network that is a variant of the You Only Look Once (YOLO) network. Then, overlapping detections are suppressed by using the NMS algorithm. Finally, the recognition network classifies the detected traffic signs.
Third-Party Prerequisites
Required
This example generates CUDA MEX and has the following third-party requirements.
- CUDA enabled NVIDIA® GPU and compatible driver.
Optional
For non-MEX builds such as static, dynamic libraries or executables, this example has the following additional requirements.
- NVIDIA toolkit.
- NVIDIA cuDNN library.
- Environment variables for the compilers and libraries. For more information, see Third-Party Hardware and Setting Up the Prerequisite Products.
Verify GPU Environment
Use the coder.checkGpuInstall function to verify that the compilers and libraries necessary for running this example are set up correctly.
envCfg = coder.gpuEnvConfig('host'); envCfg.DeepLibTarget = 'cudnn'; envCfg.DeepCodegen = 1; envCfg.Quiet = 1; coder.checkGpuInstall(envCfg);
Detection and Recognition Networks
The detection network is trained in the Darknet framework and imported into MATLAB® for inference. Because the size of the traffic sign is relatively small with respect to that of the image and the number of training samples per class are fewer in the training data, all the traffic signs are considered as a single class for training the detection network.
The detection network divides the input image into a 7-by-7 grid. Each grid cell detects a traffic sign if the center of the traffic sign falls within the grid cell. Each cell predicts two bounding boxes and confidence scores for these bounding boxes. Confidence scores indicate whether the box contains an object or not. Each cell predicts on probability for finding the traffic sign in the grid cell. The final score is product of the preceding scores. You apply a threshold of 0.2 on this final score to select the detections.
The recognition network is trained on the same images by using MATLAB.
The trainRecognitionnet.m helper script shows the recognition network training.
Get the Pretrained Detector and Recognition Networks
This example uses the yolo_tsr and RecognitionNet MAT-files containing the pretrained networks. The files are approximately 6MB and 992MB in size, respectively. Download the files from the MathWorks® website.
detectorNet = matlab.internal.examples.downloadSupportFile('gpucoder/cnn_models/traffic_sign_detection/v001','yolo_tsr.mat'); recognitionNet = matlab.internal.examples.downloadSupportFile('gpucoder/cnn_models/traffic_sign_detection/v001','RecognitionNet.mat');
The detection network contains 58 layers including convolution, leaky ReLU, and fully connected layers.
yolo = SeriesNetwork with properties:
Layers: [58×1 nnet.cnn.layer.Layer]
InputNames: {'input'}
OutputNames: {'classoutput'}To view the network architecture, use the analyzeNetwork (Deep Learning Toolbox) function.
The recognition network contains 14 layers including convolution and fully connected layers.
load(recognitionNet); convnet
convnet = SeriesNetwork with properties:
Layers: [14×1 nnet.cnn.layer.Layer]
InputNames: {'imageinput'}
OutputNames: {'classoutput'}Convert the SeriesNetwork objects to dlnetwork objects and save them to different MAT-files.
dlyolo = dag2dlnetwork(yolo); dlconvnet = dag2dlnetwork(convnet); detectorNet = 'detectorNet.mat'; recognitionNet = 'recognitionNet.mat'; save(detectorNet, 'dlyolo'); save(recognitionNet, 'dlconvnet');
The tsdr_predict Entry-Point Function
The tsdr_predict.m entry-point function takes an image input and detects the traffic signs in the image by using the detection network. The function suppresses the overlapping detections (NMS) by using selectStrongestBbox and recognizes the traffic sign by using the recognition network. The function loads the network objects from dlyolo_tsr.mat into a persistent variable detectionnet and the dlRecognitionNet.mat into a persistent variable recognitionnet. The function reuses the persistent objects on subsequent calls.
function [selectedBbox,idx] = tsdr_predict(img,detectorMATFile,recogMATFile) %#codegen
% Copyright 2017-2024 The MathWorks, Inc.
% resize the image img_rz = imresize(img,[448,448]);
% Converting into BGR format img_rz = img_rz(:,:,3:-1:1); img_rz = im2single(img_rz);
% create a formatted dlarray with 'SSC' format dlimg_rz = dlarray(img_rz, 'SSC');
%% Traffic Signal Detection
persistent detectionnet;
if isempty(detectionnet)
detectionnet = coder.loadDeepLearningNetwork(detectorMATFile,'Detection');
end
dlpredictions = predict(detectionnet, dlimg_rz, Outputs = 'fc26');
% Extract numeric array from dlarray predictions = extractdata(dlpredictions);
%% Convert predictions to bounding box attributes classes = 1; num = 2; side = 7; thresh = 0.2; [h,w,~] = size(img);
boxes = single(zeros(0,4));
probs = single(zeros(0,1));
for i = 0:(sideside)-1
for n = 0:num-1
p_index = sidesideclasses + inum + n + 1;
scale = predictions(p_index);
prob = zeros(1,classes+1);
for j = 0:classes
class_index = iclasses + 1;
tempProb = scalepredictions(class_index+j);
if tempProb > thresh
row = floor(i / side);
col = mod(i,side);
box_index = side*side*(classes + num) + (i*num + n)*4 + 1;
bxX = (predictions(box_index + 0) + col) / side;
bxY = (predictions(box_index + 1) + row) / side;
bxW = (predictions(box_index + 2)^2);
bxH = (predictions(box_index + 3)^2);
prob(j+1) = tempProb;
probs = [probs;tempProb];
boxX = (bxX-bxW/2)*w+1;
boxY = (bxY-bxH/2)*h+1;
boxW = bxW*w;
boxH = bxH*h;
boxes = [boxes; boxX,boxY,boxW,boxH];
end
end
endend
%% Run Non-Maximal Suppression on the detected bounding boxess coder.varsize('selectedBbox',[98, 4],[1 0]); [selectedBbox,~] = selectStrongestBbox(round(boxes),probs);
%% Recognition
persistent recognitionnet; if isempty(recognitionnet) recognitionnet = coder.loadDeepLearningNetwork(recogMATFile,'Recognition'); end
idx = zeros(size(selectedBbox,1),1); inpImg = coder.nullcopy(zeros(48,48,3,size(selectedBbox,1))); for i = 1:size(selectedBbox,1)
ymin = selectedBbox(i,2);
ymax = ymin+selectedBbox(i,4);
xmin = selectedBbox(i,1);
xmax = xmin+selectedBbox(i,3);
% Resize Image
inpImg(:,:,:,i) = imresize(img(ymin:ymax,xmin:xmax,:),[48,48]);end
% Create a formatted dlarray with 'SSCB' format dlinpImg = dlarray(single(inpImg), 'SSCB');
for i = 1:size(selectedBbox,1) output = predict(recognitionnet, dlinpImg(:,:,:,i)); [~,idx(i)]=max(extractdata(output)); end
Generate CUDA MEX for the tsdr_predict Function
Create a GPU configuration object for a MEX target and set the target language to C++. Use the coder.DeepLearningConfig function to create a CuDNN deep learning configuration object and assign it to the DeepLearningConfig property of the GPU code configuration object. To generate CUDA MEX, use the codegen command and specify the input to be of size [480,704,3]. This value corresponds to the input image size of the tsdr_predict function.
cfg = coder.gpuConfig('mex'); cfg.TargetLang = 'C++'; cfg.DeepLearningConfig = coder.DeepLearningConfig('cudnn'); inputArgs = {ones(480,704,3,'uint8'),coder.Constant(detectorNet),... coder.Constant(recognitionNet)}; codegen -config cfg tsdr_predict -args inputArgs -report
Code generation successful: View report
To generate code by using TensorRT, pass coder.DeepLearningConfig('tensorrt') as an option to the coder configuration object instead of 'cudnn'.
Run Generated MEX
Load an input image.
im = imread('stop.jpg'); imshow(im);

Call tsdr_predict_mex on the input image.
im = imresize(im, [480,704]); [bboxes,classes] = tsdr_predict_mex(im,detectorNet,recognitionNet);
Map the class numbers to traffic sign names in the class dictionary.
classNames = {... 'addedLane','slow','dip','speedLimit25','speedLimit35','speedLimit40',... 'speedLimit45','speedLimit50','speedLimit55','speedLimit65',... 'speedLimitUrdbl','doNotPass','intersection','keepRight','laneEnds',... 'merge','noLeftTurn','noRightTurn','stop','pedestrianCrossing',... 'stopAhead','rampSpeedAdvisory20','rampSpeedAdvisory45',... 'truckSpeedLimit55','rampSpeedAdvisory50','turnLeft',... 'rampSpeedAdvisoryUrdbl','turnRight','rightLaneMustTurn','yield',... 'yieldAhead','school','schoolSpeedLimit25','zoneAhead45','signalAhead'};
classRec = classNames(classes);
Display the detected traffic signs.
outputImage = insertShape(im,'Rectangle',bboxes,'LineWidth',3);
for i = 1:size(bboxes,1) outputImage = insertText(outputImage,[bboxes(i,1)+ ... bboxes(i,3) bboxes(i,2)-20],classRec{i},'FontSize',20,... 'TextColor','red'); end
imshow(outputImage);

Traffic Sign Detection and Recognition on a Video
The included helper file tsdr_testVideo.m grabs frames from the test video, performs traffic sign detection and recognition, and plots the results on each frame of the test video.
function tsdr_testVideo
% Copyright 2017-2024 The MathWorks, Inc.
% Input video v = VideoReader('stop.avi');
detectorNet = 'detectorNet.mat'; recognitionNet = 'recognitionNet.mat';
fps = 0;
while hasFrame(v) % Take a frame picture = readFrame(v); picture = imresize(picture,[480,704]); % Call MEX function for Traffic Sign Detection and Recognition tic; [bboxes,clases] = tsdr_predict_mex(picture,detectorNet,recognitionNet); newt = toc;
% fps
fps = .9*fps + .1*(1/newt);
% display
displayDetections(picture,bboxes,clases,fps);end
end
function displayDetections(im,boundingBoxes,classIndices,fps) % Function for inserting the detected bounding boxes and recognized classes % and displaying the result % % Inputs : % % im : Input test image % boundingBoxes : Detected bounding boxes % classIndices : Corresponding classes %
% Traffic Signs (35) classNames = {'addedLane','slow','dip','speedLimit25','speedLimit35',... 'speedLimit40','speedLimit45','speedLimit50','speedLimit55',... 'speedLimit65','speedLimitUrdbl','doNotPass','intersection',... 'keepRight','laneEnds','merge','noLeftTurn','noRightTurn','stop',... 'pedestrianCrossing','stopAhead','rampSpeedAdvisory20',... 'rampSpeedAdvisory45','truckSpeedLimit55','rampSpeedAdvisory50',... 'turnLeft','rampSpeedAdvisoryUrdbl','turnRight','rightLaneMustTurn',... 'yield','yieldAhead','school','schoolSpeedLimit25','zoneAhead45',... 'signalAhead'};
outputImage = insertShape(im,'Rectangle',boundingBoxes,'LineWidth',3);
for i = 1:size(boundingBoxes,1)
ymin = boundingBoxes(i,2);
xmin = boundingBoxes(i,1);
xmax = xmin+boundingBoxes(i,3);
% inserting class as text at YOLO detection
classRec = classNames{classIndices(i)};
outputImage = insertText(outputImage,[xmax ymin-20],classRec,...
'FontSize',20,'TextColor','red');end outputImage = insertText(outputImage,... round(([size(outputImage,1) 40]/2)-20),... ['Frame Rate: ',num2str(fps)],'FontSize',20,'TextColor','red'); imshow(outputImage); end