Yufei Ding | 丁昱菲 (original) (raw)
Research
| | SoFar: Language-Grounded Orientation Bridges Spatial Reasoning and Object Manipulation Zekun Qi*,Wenyao Zhang*,Yufei Ding*,Runpei Dong,Xinqiang Yu,Jingwen Li,Lingyun Xu,Baoyu Li,Xialin He,Guofan Fan,Jiazhao Zhang,Jiawei He,Jiayuan Gu,Xin Jin,Kaisheng Ma,Zhizheng Zhang,He Wang,Li Yi NeurIPS 2025, Spotlight Paper /Project Page /Code /Huggingface We introduce the concept of semantic orientation and propose a generalizable model for language-grounded spatial reasoning and robot manipulation. | |
| -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| 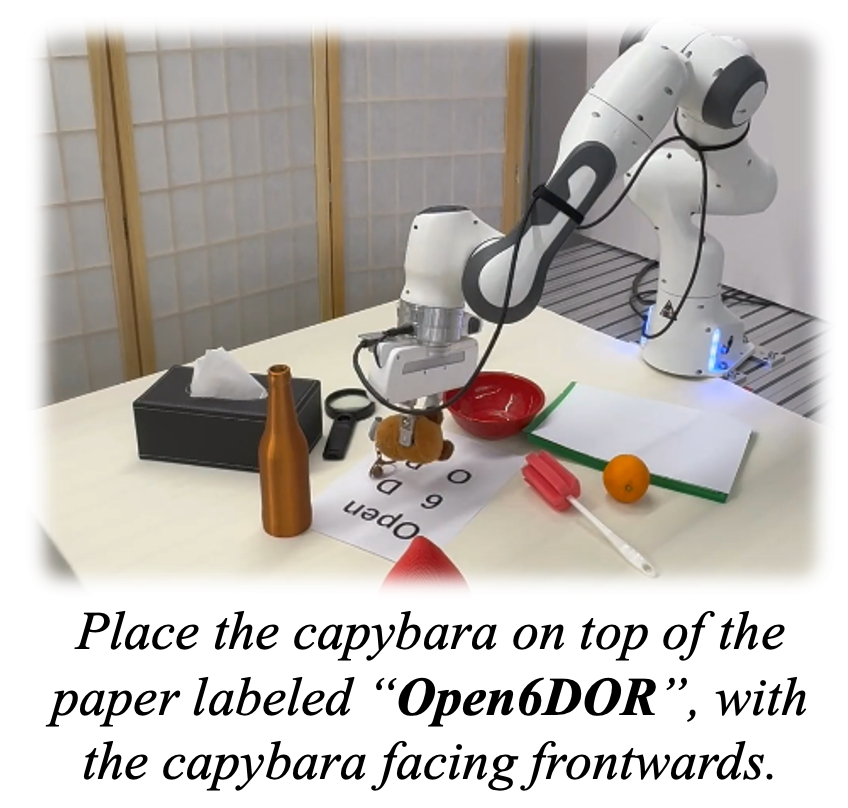 | Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach Yufei Ding*,Haoran Geng*, Chaoyi Xu,Xiaomeng Fang,Jiazhao Zhang,Songlin Wei,Qiyu Dai,Zhizheng Zhang,He Wang† Paper /Project Page /Code /Video /Bibtex @INPROCEEDINGS{10802733, author={Ding, Yufei and Geng, Haoran and Xu, Chaoyi and Fang, Xiaomeng and Zhang, Jiazhao and Wei, Songlin and Dai, Qiyu and Zhang, Zhizheng and Wang, He}, booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, title={Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach}, year={2024}, volume={}, number={}, pages={7359-7366}, keywords={Three-dimensional displays;Benchmark testing;Propulsion;6-DOF;Real-time systems;Artificial intelligence;Intelligent robots;Synthetic data}, doi={10.1109/IROS58592.2024.10802733} } IROS 2024, Oral Presentation CVPR 2024 @ VLADA, Oral Presentation ICRA 2024 @ 3D Manipulation, Spotlight We present Open6DOR, a challenging and comprehensive benchmark for open-instruction 6-DoF object rearrangement tasks. Following this, we propose a zero-shot method, Open6DORGPT, which achieves SOTA performance and proves effective in demanding simulation environments and real-world scenarios. |
|
| Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach Yufei Ding*,Haoran Geng*, Chaoyi Xu,Xiaomeng Fang,Jiazhao Zhang,Songlin Wei,Qiyu Dai,Zhizheng Zhang,He Wang† Paper /Project Page /Code /Video /Bibtex @INPROCEEDINGS{10802733, author={Ding, Yufei and Geng, Haoran and Xu, Chaoyi and Fang, Xiaomeng and Zhang, Jiazhao and Wei, Songlin and Dai, Qiyu and Zhang, Zhizheng and Wang, He}, booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, title={Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach}, year={2024}, volume={}, number={}, pages={7359-7366}, keywords={Three-dimensional displays;Benchmark testing;Propulsion;6-DOF;Real-time systems;Artificial intelligence;Intelligent robots;Synthetic data}, doi={10.1109/IROS58592.2024.10802733} } IROS 2024, Oral Presentation CVPR 2024 @ VLADA, Oral Presentation ICRA 2024 @ 3D Manipulation, Spotlight We present Open6DOR, a challenging and comprehensive benchmark for open-instruction 6-DoF object rearrangement tasks. Following this, we propose a zero-shot method, Open6DORGPT, which achieves SOTA performance and proves effective in demanding simulation environments and real-world scenarios. |
| 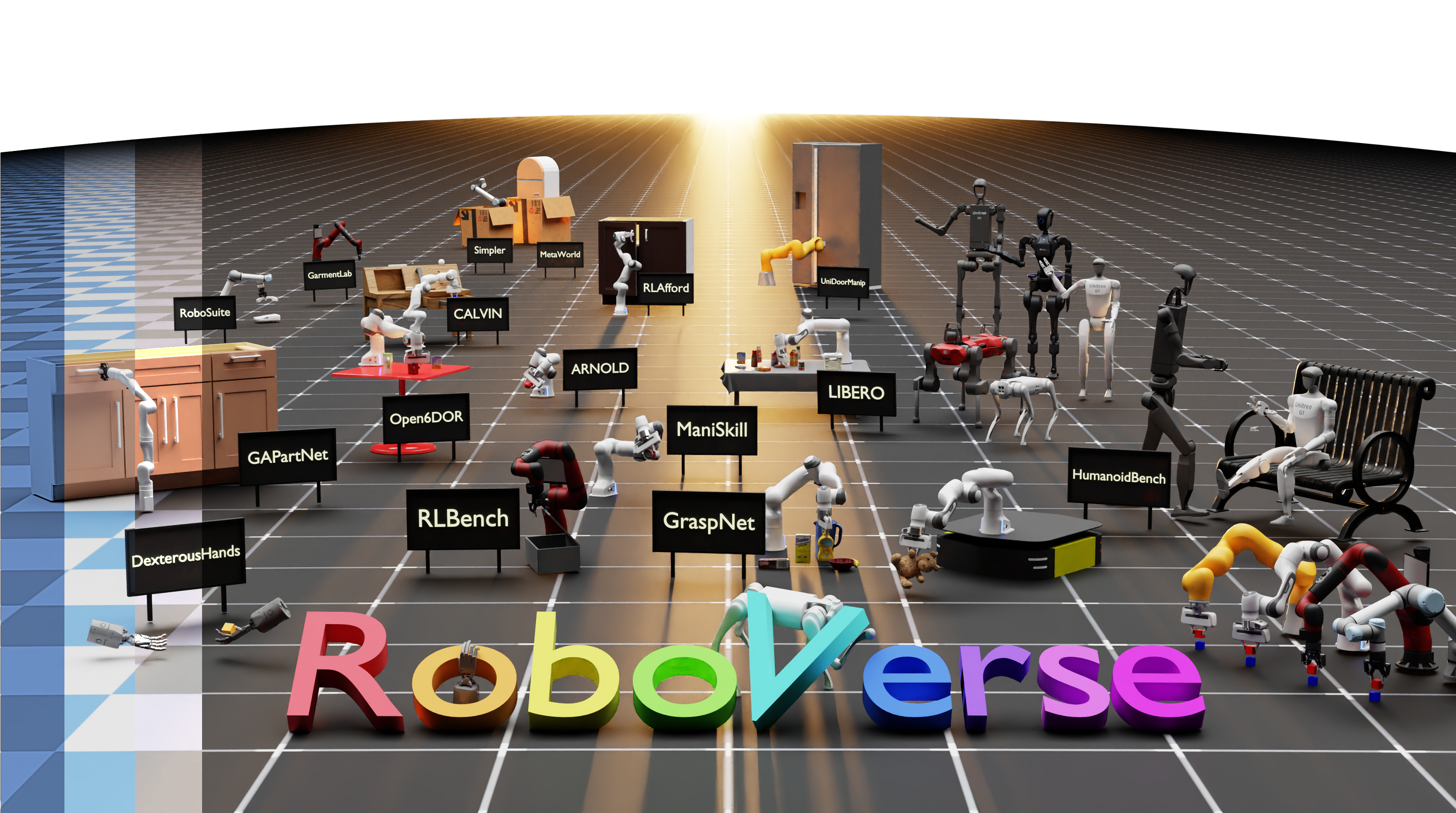 | RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning RoboVerse Team Paper /Project / Code /Bibtex @misc{geng2025roboverse, title={RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning}, author={Haoran Geng and Feishi Wang and Songlin Wei and Yuyang Li and Bangjun Wang and Boshi An and Charlie Tianyue Cheng and Haozhe Lou and Peihao Li and Yen-Jen Wang and Yutong Liang and Dylan Goetting and Chaoyi Xu and Haozhe Chen and Yuxi Qian and Yiran Geng and Jiageng Mao and Weikang Wan and Mingtong Zhang and Jiangran Lyu and Siheng Zhao and Jiazhao Zhang and Jialiang Zhang and Chengyang Zhao and Haoran Lu and Yufei Ding and Ran Gong and Yuran Wang and Yuxuan Kuang and Ruihai Wu and Baoxiong Jia and Carlo Sferrazza and Hao Dong and Siyuan Huang and Koushil Sreenath and Yue Wang and Jitendra Malik and Pieter Abbeel}, year={2025}, primaryClass={cs.RO}, url={https://roboverse.wiki}, } RSS 2025 We propose RoboVerse, a comprehensive framework for advancing robotics through a simulation platform, synthetic dataset, and unified benchmarks. Its MetaSim infrastructure abstracts diverse simulators into a universal interface, ensuring interoperability and extensibility. RoboVerse improves sim-to-real transfer and enables consistent evaluation for imitation and reinforcement learning, addressing key challenges in scaling robotic data and benchmarking. |
| | DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes Jialiang Zhang*,Haoran Liu*,Danshi Li*,Xinqiang Yu*,Haoran Geng,Yufei Ding,Jiayi Chen,He Wang† CoRL 2024 We synthesized a large-scale dexterous grasping dataset in cluttered scenes and designed a generative framework to learn grasping in the real world. | |
|
| RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning RoboVerse Team Paper /Project / Code /Bibtex @misc{geng2025roboverse, title={RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning}, author={Haoran Geng and Feishi Wang and Songlin Wei and Yuyang Li and Bangjun Wang and Boshi An and Charlie Tianyue Cheng and Haozhe Lou and Peihao Li and Yen-Jen Wang and Yutong Liang and Dylan Goetting and Chaoyi Xu and Haozhe Chen and Yuxi Qian and Yiran Geng and Jiageng Mao and Weikang Wan and Mingtong Zhang and Jiangran Lyu and Siheng Zhao and Jiazhao Zhang and Jialiang Zhang and Chengyang Zhao and Haoran Lu and Yufei Ding and Ran Gong and Yuran Wang and Yuxuan Kuang and Ruihai Wu and Baoxiong Jia and Carlo Sferrazza and Hao Dong and Siyuan Huang and Koushil Sreenath and Yue Wang and Jitendra Malik and Pieter Abbeel}, year={2025}, primaryClass={cs.RO}, url={https://roboverse.wiki}, } RSS 2025 We propose RoboVerse, a comprehensive framework for advancing robotics through a simulation platform, synthetic dataset, and unified benchmarks. Its MetaSim infrastructure abstracts diverse simulators into a universal interface, ensuring interoperability and extensibility. RoboVerse improves sim-to-real transfer and enables consistent evaluation for imitation and reinforcement learning, addressing key challenges in scaling robotic data and benchmarking. |
| | DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes Jialiang Zhang*,Haoran Liu*,Danshi Li*,Xinqiang Yu*,Haoran Geng,Yufei Ding,Jiayi Chen,He Wang† CoRL 2024 We synthesized a large-scale dexterous grasping dataset in cluttered scenes and designed a generative framework to learn grasping in the real world. | |
| ![]()
![]() | Simulately: Handy information and resources for physics simulators for robot learning research. Haoran Geng,Yuyang Li,Yuzhe Qin,Ran Gong,Wensi Ai,Yuanpei Chen,Puhao Li,Junfeng Ni,Zhou Xian,Songlin Wei,Yang You,Yufei Ding,Jialiang Zhang Website /Github Open-source Project Selected into CMU 16-831t Simulately is a project where we gather useful information of robotics & physics simulators for cutting-edge robot learning research. |
| Simulately: Handy information and resources for physics simulators for robot learning research. Haoran Geng,Yuyang Li,Yuzhe Qin,Ran Gong,Wensi Ai,Yuanpei Chen,Puhao Li,Junfeng Ni,Zhou Xian,Songlin Wei,Yang You,Yufei Ding,Jialiang Zhang Website /Github Open-source Project Selected into CMU 16-831t Simulately is a project where we gather useful information of robotics & physics simulators for cutting-edge robot learning research. |
Services
- Leader of Zhi Class, Cofounder of its wechat public account and website
- Chairman of the Academic Committee of Intelligence Science and Technology (ACIST)
- Founder of the EECS Survival Manual, which assists students at Peking University in exploring and achieving their goals by offering comprehensive information and guidance
Experience
| Stanford University 2025.06 - Present Visiting Scholar through the UGVR Program Research Advisor: Prof. Jeannette Bohg | |
|---|---|
| University of California, Berkeley 2025.01 - 2025.05 Visiting Student Research Institute: BAIR | |
 |
GALBOT 2023.10 - 2025.01 Research Intern Research Advisor: He Wang |
 |
Shanghai Artificial Intelligence Laboratory 2023.06 - 2023.09 Summer Research Intern Research Team: OpenMMLab |
 |
Zhi Class 2022.09 - Present Class Leader GPA Ranking : 1st Academic Advisor: Prof. Baoquan Chen |
 |
Peking University (PKU) 2022.09 - Present Undergraduate Student Major: Intelligence Science and Technology (Artificial Intelligence) |
Selected Awards
- 2025: Sky9 Fellowship, Sky9
- 2024: Huatai Securities Technology Scholarship
- 2024: Outstanding Student Leader of Peking University
- 2024: SenseTime Scholarship (Youngest)
- 2024: Outstanding Presentation Award @ School of EECS Research Exhibition
- 2023: SenseTime Scholarship - Most Promising Award
- 2023: Exceptional Award for Academic Innovation of Peking University (Youngest)
- 2023: National Scholarship (Highest honor for undergraduates)
- 2023: Merit Student of Peking University
- 2023: Grand Finalist in Peking University Pro-Am English Debate Competition
- 2023: Second Prize in Ubiquant Programming Competition
- 2022: Peking University Freshman Scholarship
- 2022: Outstanding Graduate Award of Shenzhen Middle School
- 2020: First Prize in Chinese Physics Olympiad (CPhO), Guangdong Province
Miscellaneous
Apart from academic studies and research, I have a wide range of interests, including dancing, piano, and English debates.
I'm a member of FL Dance Crew at Peking University.
I have been playing the piano🎹 for 10+ years and has earned Distinction in ABRSM Practical Grade 8 (highest level), as well as multiple awards in piano competitions.
I enjoy English debate🎤, and I'm a member of SpeechCrafter at Peking University. I was awarded Grand Finalist in 2023 PKU Pro-Am English Debate Competition with my partner Tianhua Yang.
I have a real passion for reading📚, with particular interests in British literature, sociology, and philosophy. I founded a Reading Club at Peking University, where we organize regular reading workshop and invite distinguished scholars to deliver lectures & host discussions. We're actively looking for participants (both readers and speakers) on a broad range of reading topics, so please feel free to contact me if you're willing to join! Previous workshops could be found here.
We host the Zhi Talk series, inviting scholars from both academia and industry to share their research and personal experiences. If you're seeking an open platform to share your ideas, join us and make your voice heard!
This homepage is designed based on Jon Barron's website.