Trigonometric Function - Specified trigonometric function on input - Simulink (original) (raw)
Specified trigonometric function on input
Libraries:
Simulink / Math Operations
HDL Coder / Math Operations
HDL Coder / HDL Floating Point Operations
Description
The Trigonometric Function block performs common trigonometric functions and outputs the result in rad or rev.
Supported Functions
You can select one of these functions from the Function parameter list.
| Function | Description | Mathematical Expression | MATLAB® Equivalent |
|---|---|---|---|
| sin | Sine of the input | sin(u) | sin |
| cos | Cosine of the input | cos(u) | cos |
| tan | Tangent of the input | tan(u) | tan |
| asin | Inverse sine of the input | asin(u) | asin |
| acos | Inverse cosine of the input | acos(u) | acos |
| atan | Inverse tangent of the input | atan(u) | atan |
| atan2 | Four-quadrant inverse tangent of the input | atan2(u) | atan2 |
| sinh | Hyperbolic sine of the input | sinh(u) | sinh |
| cosh | Hyperbolic cosine of the input | cosh(u) | cosh |
| tanh | Hyperbolic tangent of the input | tanh(u) | tanh |
| asinh | Inverse hyperbolic sine of the input | asinh(u) | asinh |
| acosh | Inverse hyperbolic cosine of the input | acosh(u) | acosh |
| atanh | Inverse hyperbolic tangent of the input | atanh(u) | atanh |
| sincos | Sine of the input; cosine of the input | — | — |
| cos + jsin | Complex exponential of the input | — | — |
CORDIC Approximation Method
CORDIC is an acronym for COordinate Rotation DIgital Computer. The Givens rotation-based CORDIC algorithm is one of the most hardware-efficient algorithms available because it requires only iterative shift-add operations. For more information, see More About. The block input has further requirements.
For more information on when you set Function tosin, cos, sincos, orcos + jsin and set the Approximation method to CORDIC, see Port_1.
This table summarizes what happens for an invalid input.
| Block Usage | Effect of Invalid Input |
|---|---|
| Simulation modes | An error appears. |
| Generated code | Undefined behavior occurs. Avoid relying on undefined behavior for generated code. |
Lookup Approximation Method
For more information on when you set Function tosin, cos, sincos, or cos + jsin and set the Approximation method to Lookup, see Port_1.
Examples
This example shows how to use the Trigonometric Function block to compute the sine of a floating-point input. The output of the Trigonometric Function block has the same data type as the input because the input data type is floating-point and the Approximation method is none.

This example shows how to use the Trigonometric Function block to compute the CORDIC approximation of sincos for a fixed-point input signal.
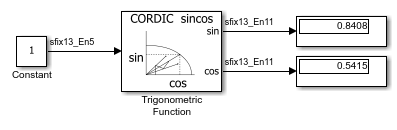
The Trigonometric Function block parameters are:
- Function:
sincos - Approximation method:
CORDIC - Number of iterations:
11
When using the CORDIC approximation method, the input to the Trigonometric Function block must be in the range [-2pi,2pi). The output type of the Trigonometric Function block is fixdt(1,13,11) because the input is a fixed-point signal and the Approximation method is set to CORDIC. The output fraction length equals the input word length minus two.
This example compares the complex exponential output for two different configurations of the Trigonometric Function block.
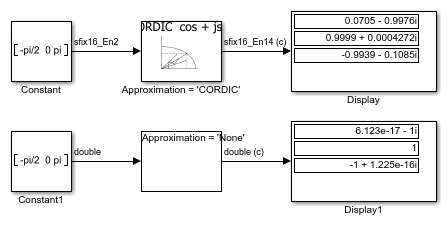
When the Approximation method is CORDIC, the input data type can be fixed point, in this case: fixdt(1,16,2). The output data type is fixdt(1,16,14) because the output fraction length equals the input word length minus two.
When the Approximation method is None, the input data type must be floating point. The output data type is the same as the input data type.
Limitations
- You can use fixed-point input signals only when Approximation method is set to
CORDICorLookup. The CORDIC and Lookup approximations are available for thesin,cos,sincos,cos + jsin, andatan2functions. - Complex input signals are supported for all functions in this block except
atan2. - When you set Approximation method to
Lookup, the number of data points are limited by:_smallEnoughNumDataPoints_ = 2(_inputFractionLen_-2)+1_bigEnoughFractionLen_ = log2(_numberOfDataPoints_ - 1)+2
where:- smallEnoughNumDataPoints is the maximum number of data points represented by specified input fraction length,inputFractionLen.
- bigEnoughFractionLen is the minimum fraction length needed to represent specified number of data points,numberOfDataPoints.
- When you set Function to
sin,cos,sincos, orcos + jsinand set theApproximation method toCORDIC, the block has these limitations:- When you use signed fixed-point types, the input angle must fall within the range [–2π, 2π) rad.
- When you use unsigned fixed-point types, the input angle must fall within the range [0, 2π) rad.
- When you set Function to
atan2and theApproximation method toCORDIC, the block has these limitations:- Inputs must be the same size, or at least one value must be a scalar value.
- Both inputs must have the same data type.
- When you use signed fixed-point types, the word length must be
126or less. - When you use unsigned fixed-point types, the word length must be
125or less.
- When you set Function to
sin,cos,sincos, orcos + jsinand set the Approximation method toLookup, the block has these limitations.- When you use signed fixed-point types, the input angle must fall within the range [-2π,2π] rad.
- When you use unsigned fixed-point types, the input angle must fall within the range [0,2π) rad.
- When you set Function to
atan2and the Approximation method toLookup, the block has these limitations:- Inputs must be the same size, or at least one value must be a scalar value.
- Both inputs must have the same data type.
Ports
Input
Input specified as a scalar, vector, or matrix. The block accepts input signals of the following data types:
| Functions | Input Data Types |
|---|---|
| sincossincoscos + jsinatan2 | Floating pointFixed point (only whenApproximation method isCORDIC orLookup) |
| tanasinacosatansinhcoshtanhasinhacoshatanh | Floating point |
CORDIC approximation fixed-point type propagations:
| Input Data Type | Function | Output Data Type |
|---|---|---|
| Fixed point, signed or unsigned | sin, cos,sincos, and cos + jsin | fixdt(1,WL,WL - 2) where_WL_ is the input word lengthThis fixed-point type provides the best precision for the CORDIC algorithm. |
| Fixed point, signed | atan2 | fixdt(1,WL,WL – 3) |
| Fixed point, unsigned | atan2 | fixdt(1,WL,WL – 2) |
Lookup approximation fixed-point type propagations:
| Input Data Type | Function | Output Data Type |
|---|---|---|
| Fixed point, signed | sin, cos,sincos, cos + jsin, atan2 | fixdt(1,WL,FL) |
| Fixed point, unsigned | sin, cos,sincos, cos + jsin, atan2 | fixdt(1,WL - 1,FL) |
Dependencies
- When you set Function to
atan2, the block shows two input ports. The first input (Port_1) is the_y_-axis or imaginary part of the function argument. The second input (Port_2) is the_x_-axis or real part of the function argument. - You can use floating-point input signals when you setApproximation method to
None,CORDIC, orLookup. However, the block output data type depends on which of these approximation method options you choose.Input Data Type Approximation Method Output Data Type Floating point None Depends on your selection forOutput signal type. Options are auto (same data type as input), real, orcomplex. Floating point CORDIC Same as input. Output signal type is not available when you use the CORDIC approximation method to compute the block output. Floating point Lookup Same as input. Output signal type is not available when you use the Lookup approximation method to compute the block output.
For CORDIC and Lookup approximations:
- Input must be real for the
sin,cos,sincos,cos + jsin, andatan2functions. - Output is real for the
sin,cos,sincos, andatan2functions. - Output is complex for the
cos + jsinfunction.
For more information, see Limitations.
Data Types: half | single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Input the _x_-axis or real part of the function argument for atan2. When you setFunction to atan2, the block shows two input ports. The first input (Port_1) is the _y_-axis or imaginary part of the function argument. The second input (Port_2) is the_x_-axis or real part of the function argument. (See Identify Port Location on Rotated or Flipped Block for a description of the port order for various block orientations.)
Fixed-point input signals are supported only when you setApproximation method toCORDIC orLookup.
Dependencies
To enable this port, set Function toatan2.
Data Types: half | single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Output
Result of applying the specified trigonometric function to one or more inputs in rad. Each function supports:
- Scalar operations
- Element-wise vector and matrix operations
Data Types: half | single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Sine of the input signal, in rad and rev.
Dependencies
To enable this port, set Function tosincos.
Data Types: half | single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Cosine of the input signal, in rad and rev.
Dependencies
To enable this port, set Function tosincos.
Data Types: half | single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | fixed point
Parameters
Algorithm
Specify the trigonometric function. The name of the function on the block icon changes to match your selection.
For more information on when you set Function tosin, cos,sincos, or cos + jsin and set the Approximation method toCORDIC, see Limitations.
Programmatic Use
| Block Parameter: Operator | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type: character vector | |||||||||||||
| Values: 'sin' | 'cos' | 'tan' | 'asin' | 'acos' | 'atan' | 'atan2' | 'sinh' | 'cosh' | 'tanh' | 'asinh' | 'acosh' | 'atanh' | 'sincos' | 'cos + jsin' |
| Default: 'sin' |
Specify the type of approximation for computing output.
| Approximation Method | Data Types Supported | When to Use This Method |
|---|---|---|
| None (default) | Floating point | You want to use the default Taylor series algorithm. |
| CORDIC | Floating point and fixed point | You want a fast, approximate iterative calculation. |
| Lookup | Floating point (double and single) and fixed point with aBias value of0 and aSlope value of the power of 2 | You want a fast, approximate lookup table implementation. |
For more information on when you set Function tosin, cos,sincos, or cos + jsin and set the Approximation method toCORDIC, see Limitations.
Dependencies
- To enable this parameter, setFunction to
sin,cos,sincos,cos + jsin, oratan2. - To use fixed-point input signals, you must setApproximation method to
CORDICorLookup. - To enable the Table data type parameter, set this method to
Lookup.
Programmatic Use
| Block Parameter: ApproximationMethod | |
|---|---|
| Type: character vector | |
| Values: 'None' | 'CORDIC' | 'Lookup' |
| Default: 'None' |
When an input falls between breakpoint values, the block interpolates the output value using neighboring breakpoints. For more information on interpolation methods, see Interpolation Methods.
Programmatic Use
| Block Parameter: InterpMethod |
|---|
| Type: character vector |
| Values: 'Linear point-slope' | 'Flat' |
| Default: 'Linear point-slope' |
Specify the number of iterations to perform the CORDIC algorithm. The default value is 11.
- When the block input uses a floating-point data type, the number of iterations can be a positive integer.
- When the block input is a fixed-point data type, the number of iterations cannot exceed the word length.
For example, if the block input isfixdt(1,16,15), the word length is 16. In this case, the number of iterations cannot exceed 16.
Dependencies
To enable this parameter, you must set theFunction and Approximation method parameters as follows:
- Set Function to
sin,cos,sincos,cos + jsin, oratan2. - Set Approximation method to
CORDIC.
Programmatic Use
| Block Parameter: NumberOfIterations |
|---|
| Type: character vector |
| Values: positive integer, less than or equal to word length of fixed-point input |
| Default: '11' |
Specify the angle unit for lookup method asradian orrevolution.
Dependencies
To enable this parameter:
- Set Function to
sin,cos,sincos,cos + jsin, oratan2. - Set Approximation method to
Lookup.
Programmatic Use
| Block Parameter: AngleUnit |
|---|
| Type: character vector |
| Values: 'radian' | 'revolution' |
| Default: 'radian' |
Specify the number of data points for lookup table as a scalar real number.
Dependencies
To enable this parameter:
- Set Function to
sin,cos,sincos,cos + jsin, oratan2. - Set Approximation method to
Lookup.
Programmatic Use
| Block Parameter: NumberOfDataPoints |
|---|
| Type: character vector |
| Values: scalar |
| Default: '16' |
Specify the output signal type of the Trigonometric Function block as auto,real, or complex.
| Function | Input Signal Type | Output Signal Type | ||
|---|---|---|---|---|
| Auto | Real | Complex | ||
| Any selection for theFunction parameter | real | real | real | complex |
| complex | complex | error | complex |
Dependencies
Setting Approximation method toCORDIC disables this parameter.
Note
When Function isatan2, complex input signals are not supported for simulation or code generation.
Programmatic Use
| Block Parameter: OutputSignalType | |
|---|---|
| Type: character vector | |
| Values: 'auto' | 'real' | 'complex' |
| Default: 'auto' |
For acos andasin, select this check box to remove the protection against out-of-range inputs, which reduces redundancy.
- When you clear this check box, the protection is enabled. The block saturates out-of-range inputs to
1or-1before any operation is performed. Generated code contains code to check for out-of-range input. - When you select this check box, the protection is removed. The block performs all operations on the input value without any changes. Generated code does not contain code to check for the out-of-range input.
Enabling this check box can eliminate redundancy if the input is already in range.
Dependencies
Setting Function toacos andasin enables this parameter.
Programmatic Use
| Block Parameter: RemoveProtectionAgainstOutOfRangeInput |
|---|
| Type: character vector |
| Values: 'off' | 'on' |
| Default: 'off' |
Specify the time interval between samples. To inherit the sample time, set this parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use the set_param function.
| Parameter: | SampleTime |
|---|---|
| Values: | "-1" (default) | scalar or vector in quotes |
Data Types
Data type for the lookup table, specified as:
Inherit: Inherit via inputdoublesinglefixdt(1,16,0)<data type expression>
For more information on setting data types, see Control Data Types of Signals.
Programmatic Use
| Block Parameter: TableDataTypeStr | |||
|---|---|---|---|
| Type: string scalar or character vector | |||
| Values: Inherit: Inherit via input |single | double | fixdt(1,16,0) | data type expression |
| Default: Inherit: Inherit via input |
Select how you would like to specify the data type properties of theOutput data type. You can choose:
Inherit— Lets you specify a rule for inheriting a data type, for example,Inherit: Inherit via internal ruleBuilt in— Lets you specify a built-in data type.Fixed point— Lets you specify the fixed-point attributes of the data type.Expression— Lets you specify an expression that evaluates to a valid data type, for example,fixdt([],16,0)
Dependencies
To enable this parameter, click >> at theOutput data type parameter.
Specify the Signedness for theOutput data type.
Dependencies
To enable this parameter, set Mode toFixed point.
Specify the Scaling for theOutput data type.
Dependencies
To enable this parameter, set Mode toFixed point.
Select the data type override mode for this signal.
Inherit— Inherits the data type override setting specified for the model.Off— Ignores the data type override setting specified for the model and uses the fixed-point data type you specify
For more information, see Specify Data Types Using Data Type Assistant in the Simulink® documentation.
Tips
The ability to turn off data type override for an individual data type provides greater control over the data types in your model when you apply data type override. For example, you can use this option to ensure that data types meet the requirements of downstream blocks regardless of the data type override setting.
Dependencies
To enable this parameter, click the Show data type assistant button, and set Mode to Built in or Fixed point.
Specify the bit size of the word that holds the quantized integer. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set Mode toFixed point.
Specify fraction length for fixed-point data type as a positive or negative integer. For more information, see Specifying a Fixed-Point Data Type.
Dependencies
To enable this parameter, set:
- Mode to
Fixed point - Scaling to
Binary point
Block Characteristics
| Data Types | double | fixed pointa | half | integera | single |
|---|---|---|---|---|
| Direct Feedthrough | yes | |||
| Multidimensional Signals | yes | |||
| Variable-Size Signals | yes | |||
| Zero-Crossing Detection | no | |||
| a This block supports fixed-point and base integer data types for 'Approximation method' CORDIC. |
More About
CORDIC is an acronym for coordinate rotation digital computer. The Givens rotation-based CORDIC algorithm is one of the most hardware-efficient algorithms available because it requires only iterative shift-add operations (see References). The CORDIC algorithm eliminates the need for explicit multipliers. Using CORDIC, you can calculate various functions such as sine, cosine, arc sine, arc cosine, arc tangent, and vector magnitude. You can also use this algorithm for divide, square root, hyperbolic, and logarithmic functions.
Increasing the number of CORDIC iterations can produce more accurate results, but doing so increases the expense of the computation and adds latency.
References
[1] Volder, Jack E., “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8 (1959); 330–334.
[2] Andraka, Ray “A Survey of CORDIC Algorithm for FPGA Based Computers.”Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays. Feb. 22–24 (1998): 191–200.
[3] Walther, J.S., “A Unified Algorithm for Elementary Functions,” Proceedings of the Spring Joint Computer Conference, May 18-20, 1971: 379–386.
[4] Schelin, Charles W., “Calculator Function Approximation,” The American Mathematical Monthly 90, no. 5 (1983): 317–325.
Extended Capabilities
Not all compilers support the asinh, acosh, and atanh functions. If you use a compiler that does not support those functions, a warning appears and the generated code fails to link.
HDL Coder™ provides additional configuration options that affect HDL implementation and synthesized logic.
HDL Architecture
To generate HDL code from the blocks that use fixed-point data, set Architecture to Cordic or LUT. This table shows the functions the block supports for these setting:
| Block Parameters | HDL Block Properties | Supported Functions |
|---|---|---|
| Set Approximation method toCORDIC, Number of data Points to any scalar real number. | Set Architecture toCordic. | sincossincoscos+jsinatan2 |
| Set Approximation method toLookup,Interpolation method toFlat, Angle Unit torevolution, and Number of data Points to any scalar real number. | Set Architecture toLUT. | sincossincoscos+jsin |
To generate HDL code for all functions of the block that use floating-point data, set theApproximation method block parameter tonone, and the Output signal type parameter to auto orreal or complex. Additionally, set the Architecture parameter in the HDL Block Properties to Trigonometric.
This block has multi-cycle implementations that introduce additional latency in the generated code. To see the added latency, view the generated model or validation model. See Generated Model and Validation Model (HDL Coder).
The latency calculation depends on the word length andLatencyStrategy settings. To view the latency calculation for fixed-point data types, see:
HDL Block Properties
| General | |
|---|---|
| ConstrainedOutputPipeline | Number of registers to place at the outputs by moving existing delays within your design. Distributed pipelining does not redistribute these registers. The default is0. For more details, see ConstrainedOutputPipeline (HDL Coder). |
| InputPipeline | Number of input pipeline stages to insert in the generated code. Distributed pipelining and constrained output pipelining can move these registers. The default is0. For more details, see InputPipeline (HDL Coder). |
| OutputPipeline | Number of output pipeline stages to insert in the generated code. Distributed pipelining and constrained output pipelining can move these registers. The default is0. For more details, see OutputPipeline (HDL Coder). |
| LatencyStrategy | To enable this property for fixed-point types, setFunction as sin,cos, sincos,cos+jsin, or atan2 and Approximation method asCORDIC. Specify whether to map the blocks in your design to MAX,Min, CUSTOM, orZERO latency for fixed-point and floating-point types. The default isMAX. See also LatencyStrategy (HDL Coder). |
| CustomLatency | To enable this property for fixed-point types, setFunction as sin,cos, sincos,cos+jsin, or atan2 and Approximation method asCORDIC. WhenLatencyStrategy is set toCUSTOM, use this property to specify a custom latency value between ZERO andMAX for fixed-point types. See alsoLatencyStrategy (HDL Coder). |
| IterationsPerPipeline | To enable this property for fixed-point types, setFunction as sin,cos, sincos,cos+jsin, or atan2 and Approximation method asCORDIC. When you setLatencyStrategy toCustom(PerIterations), use this setting to specify the number of iterations per pipeline stages. For more information, see Atan2 (HDL Coder). |
| Native Floating Point | |
|---|---|
| InputRangeReduction | Use this property for the sin, cos,sincos, cos+jsin, and atan2 functions. If your input range is unbounded, enable this property for HDL Coder to insert additional logic to reduce the range of inputs to [-pi, pi]. See also InputRangeReduction (HDL Coder). |
| HandleDenormals | Specify whether you want HDL Coder to insert additional logic to handle denormal numbers in your design. Denormal numbers are numbers that have magnitudes less than the smallest floating-point number that can be represented without leading zeros in the mantissa. The default isinherit. See also HandleDenormals (HDL Coder). |
| LatencyStrategy | Specify whether to map the blocks in your design toinherit, Max, Min, or Zero for the floating-point operator. The default isinherit. See also LatencyStrategy (HDL Coder). |
| MultiplyStrategy | Use this property for the sin, cos,sincos, cos+jsin, and atan2 functions. The default isinherit. Specify whether you want to use FullMultiplier orPartMultiplierPartAddShift. See alsoMantissaMultiplyStrategy (HDL Coder). |
Restrictions
- For the
sinandcosfunctions, the block supports only signed fixed-point data types for CORDIC approximations. - For functions that have the CORDIC mode, such as
sin,cos,sincos,atan2, andcos+jsin, HDL code generation does not support fixed-point data types greater than127bits. - HDL code generation does not support the double data types for trigonometric functions, except for
sinandcosfunctions. - HDL code generation does not support the lookup approximation method when:
- The Interpolation method parameter is set to
Linear point-slopeand theAngle Unit parameter is set toradianorrevolution. - The Interpolation method parameter is
Flatand the Angle Unit parameter isradian.
- The Interpolation method parameter is set to
- HDL Coder displays an error when a Trigonometric Function block is inside a feedback loop and you set:
- Architecture to
Cordic - UsePipelinedKernel to
On
The error occurs because the block is in a feedback loop and the code generator is unable to insert additional latency. To avoid this error, add a delay of length equal to the Number of iterations plus 3 adjacent to the block. The code generator then absorbs this delay to meet the additional latency of theTrigonometric Function block.
For example, this Trigonometric Function block has Number of iterations set to30. Adding aDelay block with a length33adjacent to the block meets the additional latency.
- Architecture to
This block supports fixed-point and base integer data types when you set theFunction to sin,cos, sincos,cos + jsin, or atan2 and set theApproximation method toCORDIC.
Version History
Introduced before R2006a